ROS之Gazebo
Posted Montauk
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS之Gazebo相关的知识,希望对你有一定的参考价值。
<?xml version="1.0"?>
<launch>
<!-- these are the arguments you can pass this launch file, for example paused:=true -->
<arg name="paused" default="true"/>
<arg name="use_sim_time" default="false"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<!-- We resume the logic in empty_world.launch, changing only the name of the world to be launched -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(find carModel)/worlds/robot.world"/>
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<!-- Load the URDF into the ROS Parameter Server -->
<arg name="model" />
<param name="robot_description" command="$(find xacro)/xacro.py $(find carModel)/urdf/robot1_base_02.xacro" />
<!-- Run a python script to the send a service call to gazebo_ros to spawn a URDF robot -->
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen" args="-urdf -model robot1 -param robot_description -z 0.05"/>
</launch>
首先是把ros自带的gazebo_ros包的启动文件加载进来, 并启动里面的节点
<include file="$(find gazebo_ros)/launch/empty_world.launch">
然后解码xacro
<param name="robot_description" command="$(find xacro)/xacro.py $(find carModel)/urdf/robot1_base_02.xacro" />
然后启动一个urdf转换节点:
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen" args="-urdf -model robot1 -param robot_description -z 0.05"/>
再看看这个xacro里面都是啥:
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro"
xmlns:sensor="http://playerstage.sourceforge.net/gazebo/xmlschema/#sensor"
xmlns:controller="http://playerstage.sourceforge.net/gazebo/xmlschema/#controller"
xmlns:interface="http://playerstage.sourceforge.net/gazebo/xmlschema/#interface"
name="robot1_xacro">
<xacro:property name="length_wheel" value="0.05" />
<xacro:property name="radius_wheel" value="0.05" />
<xacro:macro name="default_inertial" params="mass">
<inertial>
<mass value="${mass}" />
<inertia ixx="1.0" ixy="0.0" ixz="0.0"
iyy="1.0" iyz="0.0"
izz="1.0" />
</inertial>
</xacro:macro>
<xacro:include filename="$(find carModel)/urdf/robot.gazebo" />
<link name="base_footprint">
<visual>
<geometry>
<box size="0.001 0.001 0.001"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0"/>
</visual>
<xacro:default_inertial mass="0.0001"/>
</link>
<gazebo reference="base_footprint">
<material>Gazebo/Green</material>
<turnGravityOff>false</turnGravityOff>
</gazebo>
<joint name="base_footprint_joint" type="fixed">
<origin xyz="0 0 0" />
<parent link="base_footprint" />
<child link="base_link" />
</joint>
<link name="base_link">
<visual>
<geometry>
<box size="0.2 .3 .1"/>
</geometry>
<origin rpy="0 0 1.54" xyz="0 0 0.05"/>
<material name="darkblue">
<color rgba=".1 .1 .5 1"/>
</material>
</visual>
<collision>
<geometry>
<box size="0.2 .3 0.1"/>
</geometry>
</collision>
<xacro:default_inertial mass="10"/>
</link>
<link name="wheel_1">
<visual>
<geometry>
<cylinder length="${length_wheel}" radius="${radius_wheel}"/>
</geometry>
<!-- <origin rpy="0 1.5 0" xyz="0.1 0.1 0"/> -->
<origin rpy="0 0 0" xyz="0 0 0"/>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
</visual>
<collision>
<geometry>
<cylinder length="${length_wheel}" radius="${radius_wheel}"/>
</geometry>
</collision>
<xacro:default_inertial mass="1"/>
</link>
<link name="wheel_2">
<visual>
<geometry>
<cylinder length="${length_wheel}" radius="${radius_wheel}"/>
</geometry>
<!-- <origin rpy="0 1.5 0" xyz="-0.1 0.1 0"/> -->
<origin rpy="0 0 0" xyz="0 0 0"/>
<material name="black"/>
</visual>
<collision>
<geometry>
<cylinder length="${length_wheel}" radius="${radius_wheel}"/>
</geometry>
</collision>
<xacro:default_inertial mass="1"/>
</link>
<link name="wheel_3">
<visual>
<geometry>
<cylinder length="${length_wheel}" radius="${radius_wheel}"/>
</geometry>
<!-- <origin rpy="0 1.5 0" xyz="0.1 -0.1 0"/> -->
<origin rpy="0 0 0" xyz="0 0 0"/>
<material name="black"/>
</visual>
<collision>
<geometry>
<cylinder length="${length_wheel}" radius="${radius_wheel}"/>
</geometry>
</collision>
<xacro:default_inertial mass="1"/>
</link>
<link name="wheel_4">
<visual>
<geometry>
<cylinder length="${length_wheel}" radius="${radius_wheel}"/>
</geometry>
<!-- <origin rpy="0 1.5 0" xyz="-0.1 -0.1 0"/> -->
<origin rpy="0 0 0" xyz="0 0 0" />
<material name="black"/>
</visual>
<collision>
<geometry>
<cylinder length="${length_wheel}" radius="${radius_wheel}"/>
</geometry>
</collision>
<xacro:default_inertial mass="1"/>
</link>
<joint name="base_to_wheel1" type="continuous">
<parent link="base_link"/>
<child link="wheel_1"/>
<origin rpy="1.5707 0 0" xyz="0.1 0.15 0"/>
<axis xyz="0 0 1" />
</joint>
<joint name="base_to_wheel2" type="continuous">
<axis xyz="0 0 1" />
<anchor xyz="0 0 0" />
<limit effort="100" velocity="100" />
<parent link="base_link"/>
<child link="wheel_2"/>
<origin rpy="1.5707 0 0" xyz="-0.1 0.15 0"/>
</joint>
<joint name="base_to_wheel3" type="continuous">
<parent link="base_link"/>
<axis xyz="0 0 1" />
<child link="wheel_3"/>
<origin rpy="1.5707 0 0" xyz="0.1 -0.15 0"/>
</joint>
<joint name="base_to_wheel4" type="continuous">
<parent link="base_link"/>
<axis xyz="0 0 1" />
<child link="wheel_4"/>
<origin rpy="1.5707 0 0" xyz="-0.1 -0.15 0"/>
</joint>
分别定义了若干link, 关节.
运行下面的命令:
roslaunch carModel gazebo.launch
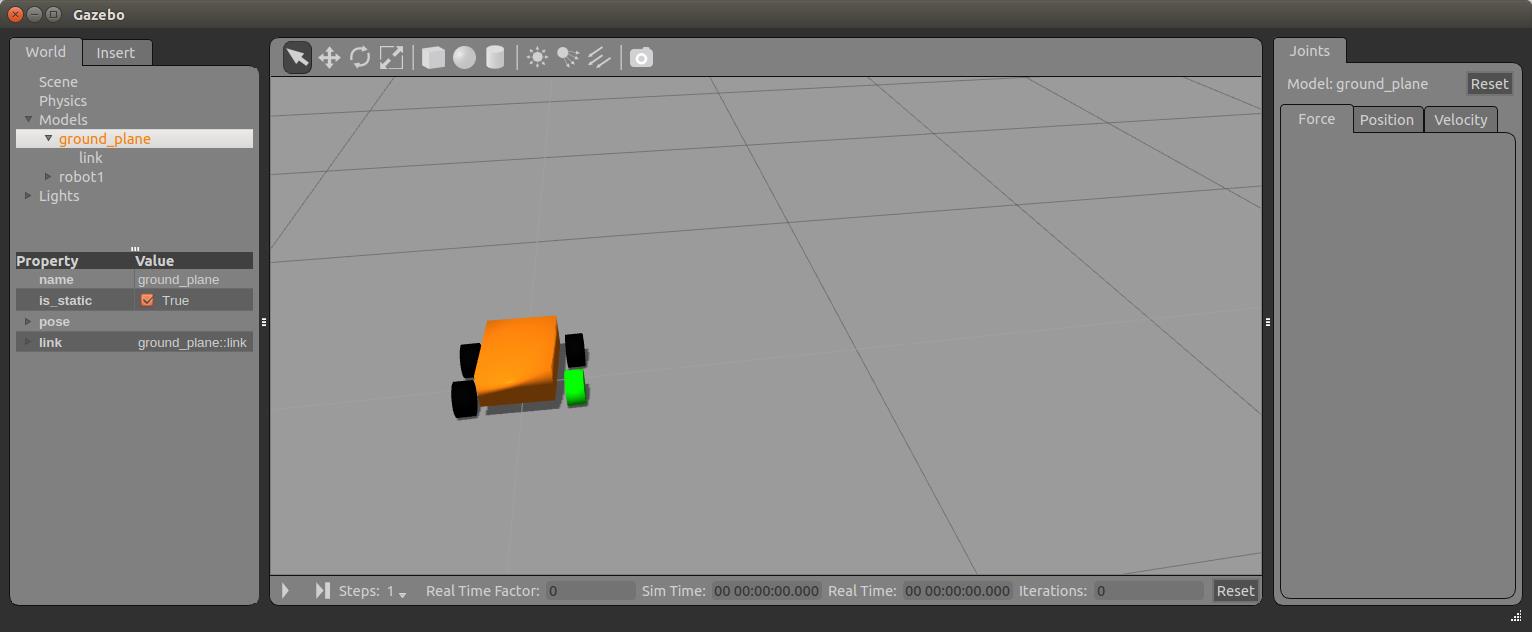
为啥有个轮子是绿色的呢?
<xacro:include filename="$(find carModel)/urdf/robot.gazebo" />
这个gazebo文件里面是轮子的贴图:
<?xml version="1.0"?>
<robot>
<!-- materials -->
<gazebo reference="base_link">
<material>Gazebo/Orange</material>
</gazebo>
<gazebo reference="wheel_1">
<material>Gazebo/Green</material>
</gazebo>
<gazebo reference="wheel_2">
<material>Gazebo/Black</material>
</gazebo>
<gazebo reference="wheel_3">
<material>Gazebo/Black</material>
</gazebo>
<gazebo reference="wheel_4">
<material>Gazebo/Black</material>
</gazebo>
<!-- ros_control plugin -->
<gazebo>
<plugin name="gazebo_ros_control" filename="libgazebo_ros_control.so">
<robotNamespace>/robot</robotNamespace>
</plugin>
</gazebo>
<!-- Link1 -->
<gazebo reference="link1">
<material>Gazebo/Orange</material>
</gazebo>
<!-- Link2 -->
<gazebo reference="link2">
<mu1>0.2</mu1>
<mu2>0.2</mu2>
<material>Gazebo/Black</material>
</gazebo>
<!-- Link3 -->
<gazebo reference="link3">
<mu1>0.2</mu1>
<mu2>0.2</mu2>
<material>Gazebo/Orange</material>
</gazebo>
<!-- camera_link -->
<gazebo reference="camera_link">
<mu1>0.2</mu1>
<mu2>0.2</mu2>
<material>Gazebo/Red</material>
</gazebo>
<!-- hokuyo -->
<gazebo reference="hokuyo_link">
<sensor type="ray" name="head_hokuyo_sensor">
<pose>0 0 0 0 0 0</pose>
<visualize>false</visualize>
<update_rate>40</update_rate>
<ray>
<scan>
<horizontal>
<samples>720</samples>
<resolution>1</resolution>
<min_angle>-1.570796</min_angle>
<max_angle>1.570796</max_angle>
</horizontal>
</scan>
<range>
<min>0.10</min>
<max>30.0</max>
<resolution>0.01</resolution>
</range>
<noise>
<type>gaussian</type>
<!-- Noise parameters based on published spec for Hokuyo laser
achieving "+-30mm" accuracy at range < 10m. A mean of 0.0m and
stddev of 0.01m will put 99.7% of samples within 0.03m of the true
reading. -->
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray>
<plugin name="gazebo_ros_head_hokuyo_controller" filename="libgazebo_ros_laser.so">
<topicName>/robot/laser/scan</topicName>
<frameName>hokuyo_link</frameName>
</plugin>
</sensor>
</gazebo>
<!-- camera -->
<gazebo reference="camera_link">
<sensor type="camera" name="camera1">
<update_rate>30.0</update_rate>
<camera name="head">
<horizontal_fov>1.3962634</horizontal_fov>
<image>
<width>800</width>
<height>800</height>
<format>R8G8B8</format>
</image>
<clip>
<near>0.02</near>
<far>300</far>
</clip>
<noise>
<type>gaussian</type>
<!-- Noise is sampled independently per pixel on each frame.
That pixel\'s noise value is added to each of its color
channels, which at that point lie in the range [0,1]. -->
<mean>0.0</mean>
<stddev>0.007</stddev>
</noise>
</camera>
<plugin name="camera_controller" filename="libgazebo_ros_camera.so">
<alwaysOn>true</alwaysOn>
<updateRate>0.0</updateRate>
<cameraName>robot/camera1</cameraName>
<imageTopicName>image_raw</imageTopicName>
<cameraInfoTopicName>camera_info</cameraInfoTopicName>
<frameName>camera_link</frameName>
<hackBaseline>0.07</hackBaseline>
<distortionK1>0.0</distortionK1>
<distortionK2>0.0</distortionK2>
<distortionK3>0.0</distortionK3>
<distortionT1>0.0</distortionT1>
<distortionT2>0.0</distortionT2>
</plugin>
</sensor>
</gazebo>
</robot>
以上是关于ROS之Gazebo的主要内容,如果未能解决你的问题,请参考以下文章