Harris角点检测学习
Posted Wiley_Li
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Harris角点检测学习相关的知识,希望对你有一定的参考价值。
1.角点的定义与性质
角点是一种局部特征,具有旋转不变性和不随光照条件变化而变化的特点,一般将图像中曲率足够高或者曲率变化明显的点作为角点。检测得到的角点特征通常用于图像匹配、目标跟踪、运动估计等方面。
2.Harris角点
1)定性描述
该算法中,将图像分为平坦区域、边缘、角点三部分。平坦区域中像素灰度在各个方向上变换都很小,边缘上的像素灰度在某个方向变化很大,但是在另一些方向变化很小;位于角点上的像素灰度则在各个方向上的变化都比较大。这是通过人眼观察得到的直观感受。
2)量化的数学表达
不同区域像素的变化与相似性是相反的关系:变化越大,相似性越小,反之亦然。所以我们可以使用相似性度量其变化程度。图像I(x,y)在中心(x,y)处区域W(x,y)与相对中心(x,y)移动了△x/△y之后的区域相关性可以通过自相关函数给出
![]()
w(u,v)是加权函数,可选取常数或者高斯加权函数(一般选取后者)
看到delta标志就会想到泰勒展开式简化,简化流程如下:

所以之前的相似性度量可以近似表达为一个二次项函数

其本质是一个椭圆函数,椭圆的主方向就是图像变化率最大的主要方向。而椭圆的大小又是由M(x,y)的特征值决定的。

套用这套理论到平坦区域、边缘、角点上,则表示为:
(1)边缘;椭圆狭长,一个特征值大、另一个特征值小
(2)平坦区域;两个特征值都很小
(3)角点;两个特征值都很大

所以求出矩阵M(x,y)的两个特征值可以用于检测角点,但是计算量太大。Harris角点检测中避免直接求取特征值,而是利用M(x,y)的性质来计算两个特征值的相对大小
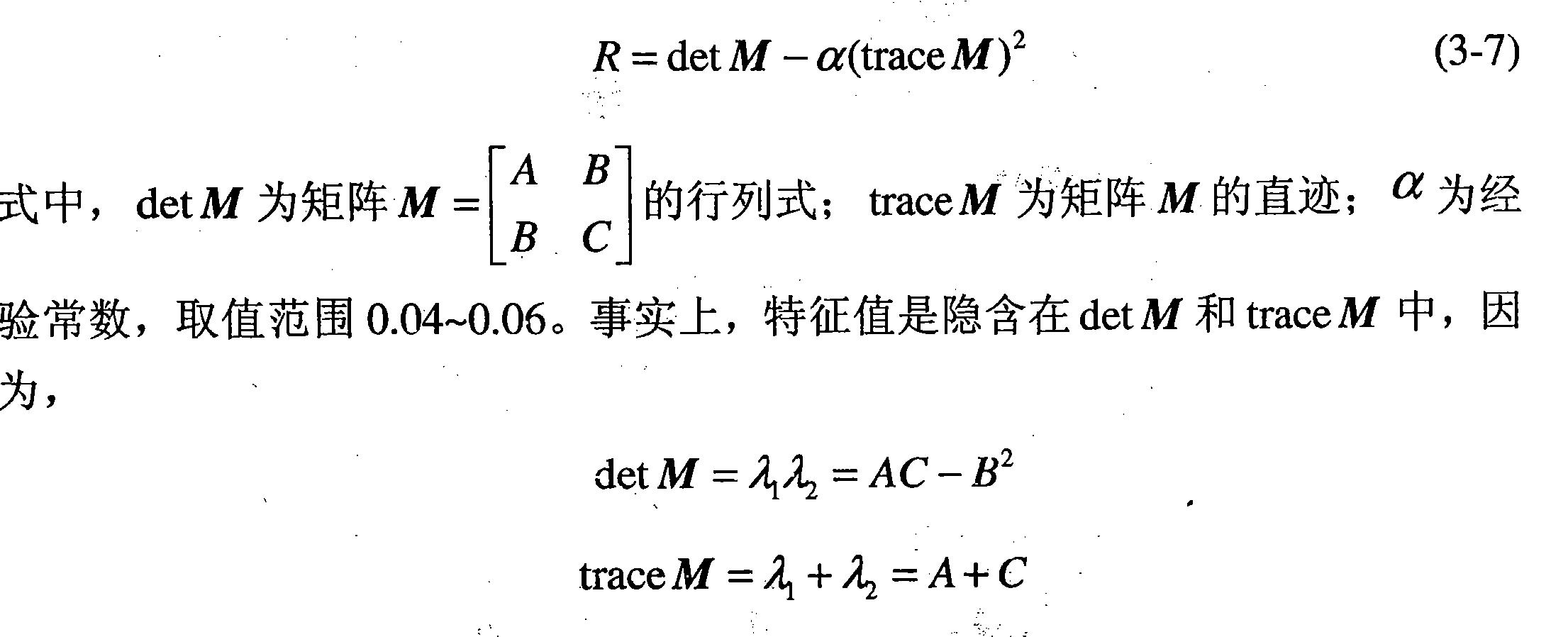
只有两个特征值都比较大的情况下R取值才比较大
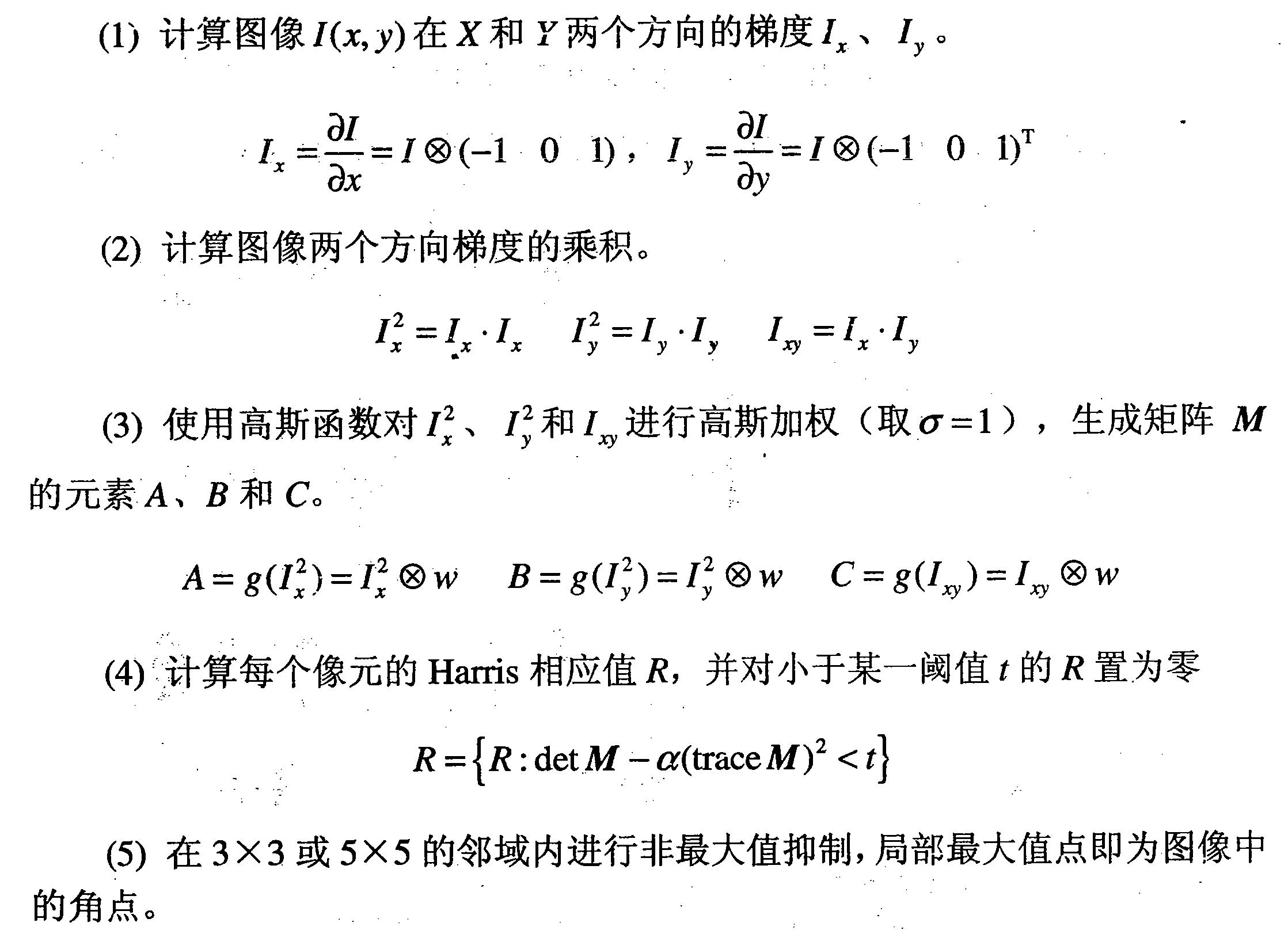
3.算法流程
根据前面的描述,只要计算出图像中各个像素对应的R,并根据一个设定的阈值二值化处理即可得到角点。为了滤除局部区域的非极大值,可以使用非极大值抑制法做进一步的处理。算法整理流程如下:
4.opencv实现
个人使用的开发环境是是opencv_2.4.13+vs2012,现将代码贴出


1 #include <iostream> 2 #include <core/core.hpp> 3 #include <highgui/highgui.hpp> 4 #include <features2d/features2d.hpp> 5 #include <imgproc/imgproc.hpp> 6 7 using namespace std; 8 using namespace cv; 9 10 int main(int argc, char* argv[]) 11 { 12 /* 1.以bmp格式读取图片,注意该图片此时应该放置于.sln所在目录 */ 13 Mat image = imread("../church01.jpg", 0); 14 if(!image.data) 15 return 0; 16 17 namedWindow("originalImage"); 18 imshow("originalImage", image); 19 20 /* 2.计算图像沿x/y方向一阶导数 */ 21 Mat xKernel = (Mat_<double>(1,3) << -1, 0, 1); 22 Mat yKernel = xKernel.t(); 23 24 Mat Ix, Iy; 25 filter2D(image, Ix, CV_64F, xKernel); 26 filter2D(image, Iy, CV_64F, yKernel); 27 28 /* 3.计算矩阵M中的各项 */ 29 Mat Ix2, Iy2, Ixy; 30 Ix2 = Ix.mul(Ix); 31 Iy2 = Iy.mul(Iy); 32 Ixy = Ix.mul(Iy); 33 34 /* 注意这里使用的是一阶高斯滤波而非二阶,尚未 35 * 理解其原因 36 */ 37 Mat gaussKernel = getGaussianKernel(7,1); 38 filter2D(Ix2, Ix2, CV_64F, gaussKernel); 39 filter2D(Iy2, Iy2, CV_64F, gaussKernel); 40 filter2D(Ixy, Ixy, CV_64F, gaussKernel); 41 42 /* 4.根据公式计算R矩阵 */ 43 Mat cornerStrength(image.size(), CV_64F); 44 float alpha = 0.1f; 45 int rows, cols; 46 rows = image.rows; 47 cols = image.cols; 48 for(int i = 0; i < rows; i++) 49 { 50 for(int j = 0; j < cols; j++) 51 { 52 double det_m = Ix2.at<double>(i,j) * Iy2.at<double>(i,j) - Ixy.at<double>(i,j) * Ixy.at<double>(i,j); 53 double trace_m = Ix2.at<double>(i,j) + Iy2.at<double>(i,j); 54 cornerStrength.at<double>(i,j) = det_m - alpha*trace_m*trace_m; 55 } 56 } 57 58 /* 5.阈值化并进行非极大值抑制 */ 59 double maxStrength, minStrength; 60 minMaxLoc(cornerStrength, &minStrength, &maxStrength); 61 Mat dilated; 62 Mat localMax; 63 dilate(cornerStrength, dilated, Mat()); 64 compare(cornerStrength, dilated, localMax, CMP_EQ); 65 66 double threshold = 0.01 * maxStrength; 67 Mat cornerMap; 68 cornerMap = cornerStrength > threshold; 69 bitwise_and(cornerMap, localMax, cornerMap); 70 namedWindow("cornerMap"); 71 imshow("cornerMap", cornerMap); 72 73 /* 6.在原图上绘制角点 */ 74 image = imread("../church01.jpg", 0); 75 for(int x = 0;x < cornerMap.cols; x++) 76 { 77 for(int y = 0; y < cornerMap.rows; y++) 78 { 79 if(cornerMap.at<uchar>(y,x)) 80 { 81 circle(image, Point(x,y), 3, Scalar(255), 1); 82 83 } 84 } 85 } 86 87 namedWindow("Harris Corner"); 88 imshow("Harris Corner", image); 89 waitKey(); 90 return 0; 91 }
代码执行效果如下,originalImage是读入的原图,cornerMap是计算得到的角点(白色显示),Harris Corner是在原图上绘制角点的效果。



5.参考资料
[1]《图像局部不变性特征与描述》
[2]http://www.cnblogs.com/polly333/p/5416172.htmlHarris角点算法
以上是关于Harris角点检测学习的主要内容,如果未能解决你的问题,请参考以下文章