AutoWare 使用
Posted zhuxuekui3
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了AutoWare 使用相关的知识,希望对你有一定的参考价值。
1、安装readme当中的要求,安装依赖库
52 sudo apt-get install ros-indigo-desktop-full ros-indigo-nmea-msgs ros-indigo-nmea-navsat-driver ros-indigo-sound-play ros-indigo-jsk-visualization ros-indigo-grid-map
953 sudo apt-get install ros-indigo-controller-manager ros-indigo-ros-control ros-indigo-ros-controllers ros-indigo-gazebo-ros-control ros-indigo-sicktoolbox ros-indigo-sicktoolbox-wrapper ros-indigo-joystick-drivers ros-indigo-novatel-span-driver
954 sudo apt-get install libnlopt-dev freeglut3-dev qtbase5-dev libqt5opengl5-dev libssh2-1-dev libarmadillo-dev libpcap-dev gksu libgl1-mesa-dev
2、还有一些库
比如:sudo apt-get install gksu
以及其他的库
3、autoware 需要从网上直接git clone 下来,不然会出现莫名其妙的错误。
关于文件夹隐藏的事情,可以通过右键来解决。
显示隐藏属性。
有些文件属性可能会有问题 chmod -R 777 xxxx
还有就是my_launch 需要自己生产。
出现的错误 can not find lcuda,到现在还没搞清楚问题。只是现在没出现而已
下面是错误的:
90%] Building CXX object computing/perception/detection/lib/image/dpm_ttic/CMakeFiles/libdpm_ttic.dir/gpu/tracking.cpp.o
Linking CXX executable /home/zhuxuekui/Autoware/ros/devel/lib/calibration_camera_lidar/calibration_test
[ 90%] Built target calibration_test
[ 91%] Building CXX object computing/perception/detection/lib/image/dpm_ttic/CMakeFiles/libdpm_ttic.dir/gpu/nms.cpp.o
Linking CXX shared library /home/zhuxuekui/Autoware/ros/devel/lib/libdpm_ttic.so
/usr/bin/ld: cannot find -lcuda
collect2: error: ld returned 1 exit status
make[2]: *** [/home/zhuxuekui/Autoware/ros/devel/lib/libdpm_ttic.so] Error 1
make[1]: *** [computing/perception/detection/lib/image/dpm_ttic/CMakeFiles/libdpm_ttic.dir/all] Error 2
make: *** [all] Error 2
Invoking "make -j4 -l4" failed
zhuxuekui@zhuxuekui-HP-EliteBook-840-G3:~/Autoware/ros$ ./run
正确的编译结束后是这样的:
1033 catkin_make_isolated dpm_ttic
1034* catkin_make_isolated --pkg
1035 catkin_make -DCATKIN_WHITELIST_PACKAGES=dpm_ttic
1036 ./catkin_make_debug >> ~/debug.log
1037 sudo apt-get install cuda
1038 sudo apt-get install cuda-6-5
1039 sudo apt-get install cuda-runtime-6-5
1040 sudo apt-get install cuda-drivers
1041 sudo apt-get install cuda-driver-dev-6-5
1042 apt-get install cuda-runtime-6-5
1043 sudo apt-get install cuda-runtime-6-5
1044 sudo apt-get install cuda-driver-6-5
1045* sudo
1046 sudo apt-get install cuda-driver-dev-6-5
1047 sudo apt-get install cuda-toolkit-6-5
1048 sudo apt-get install cuda-6-5
1049 sudo apt-get install cuda-core-6-5
1050 sudo apt-get install cuda-runtime-6-5
1051 ls
1052 cd src/
1053 grep -rn "cuda" *
1054 cd ..
1055 ./catkin_make_release
1056 ls
1057 ./catkin_make_release
1058 cd
1059 git clone https://github.com/CPFL/Autoware.git
1060 ls
1061 cd Autoware/ros/
1062 ls
1063 cd src/
1064 catkin_init_workspace
1065 cd ..
1066 ls
1067 ./catkin_make_release
1068 ./run
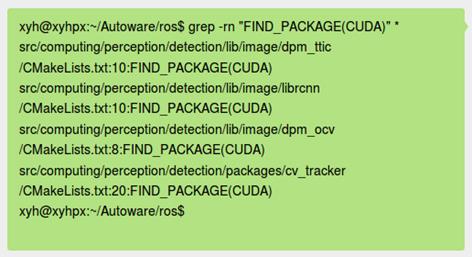
在此,我们是去掉了CUDA的影响了。
上面是需要去掉CUDA的操作。
然后编译有98%是通过的,这个时候才是对的。
且运行 manage的时候是没有错误的,不然也是会有问题。切记。
剩下的就是按照文档当中的步骤来操作即可。
明天继续研究。
以上是关于AutoWare 使用的主要内容,如果未能解决你的问题,请参考以下文章