木材表面缺陷如何检测?
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了木材表面缺陷如何检测?相关的知识,希望对你有一定的参考价值。
基于机器视觉的木材表面缺陷的在线检测技术研究基于莫士特科技机器视觉技术和模式识别理论的木材表面缺陷检测技术,具有无损性、快速性、准确性和经济性等优点,对锯材等级分选、提高锯材商品质量和加速木材加工自动化具有非常重要的作用。本文以虫眼、死节、活节三种常见木材缺陷为研究对象,对木材表面缺陷的机器视觉检测方法进行了深入的研究。主要内容包括:木材表面缺陷预处理、图像分割、特征提取、缺陷类型识别。图像预处理是第一步,根据木材表面图像特点,增强锐化图像,消除噪声。图像分割是木材表面缺陷检测的关键步骤,针对传统Ostu算法和Renyi熵算法的不足,根据木缺陷这一自然纹理型事物,采用了小波重构方法对木材缺陷图像进行分割,该方法应用小波基函数在较优的分解级数上对纹理图像进行分解,然后在较好的分辨率级数上正确选取平滑图像或细节图像来重建图像,在重建图像中,均匀纹理图案被有效的移除,仅保留局部瑕疵区域。最后采用数学形态学工具,对分割后图像进行了形态学后处理,加强了分割图像的可视性和完整性,提高了缺陷提取的精确度。对于木材缺陷的识别,从纹理特征(11个灰度矩阵参数)和几何特征(伸长度和矩形度)两个角度来描述缺陷。采用BP神经网络分类器进行木材缺陷的识别,识别率达到90%。实验结果证明:运用机器视觉技术,根据木材表面缺陷的图像纹理特征,对木材表面的缺陷进行分割和识别处理是行之有效的途径。
QCROBOT可提供此机器视觉模块及工程解决方案 参考技术A 不知道你检测到什么程度,简单的有一种类似于显微摄像头的东西,放在木材表面就能在电脑上看到放大的图像,一般能放大几百倍。也可以对画面上你感兴趣的东西做一些简单的测量。
表面缺陷检测基于yolov7的钢板表面缺陷检测(Ubuntu系统)
Hello,大家好,我是augustqi。今天手把手带大家做一个深度学习实战项目:基于yolov7的钢板表面缺陷检测(Ubuntu系统)。多的不说,少的不唠,下面开始今天的教程。
以下内容,完全是我根据参考资料和个人理解撰写出来的,不存在滥用原创的问题。
1.下载yolov7源码
源码地址:
https://github.com/WongKinYiu/yolov7
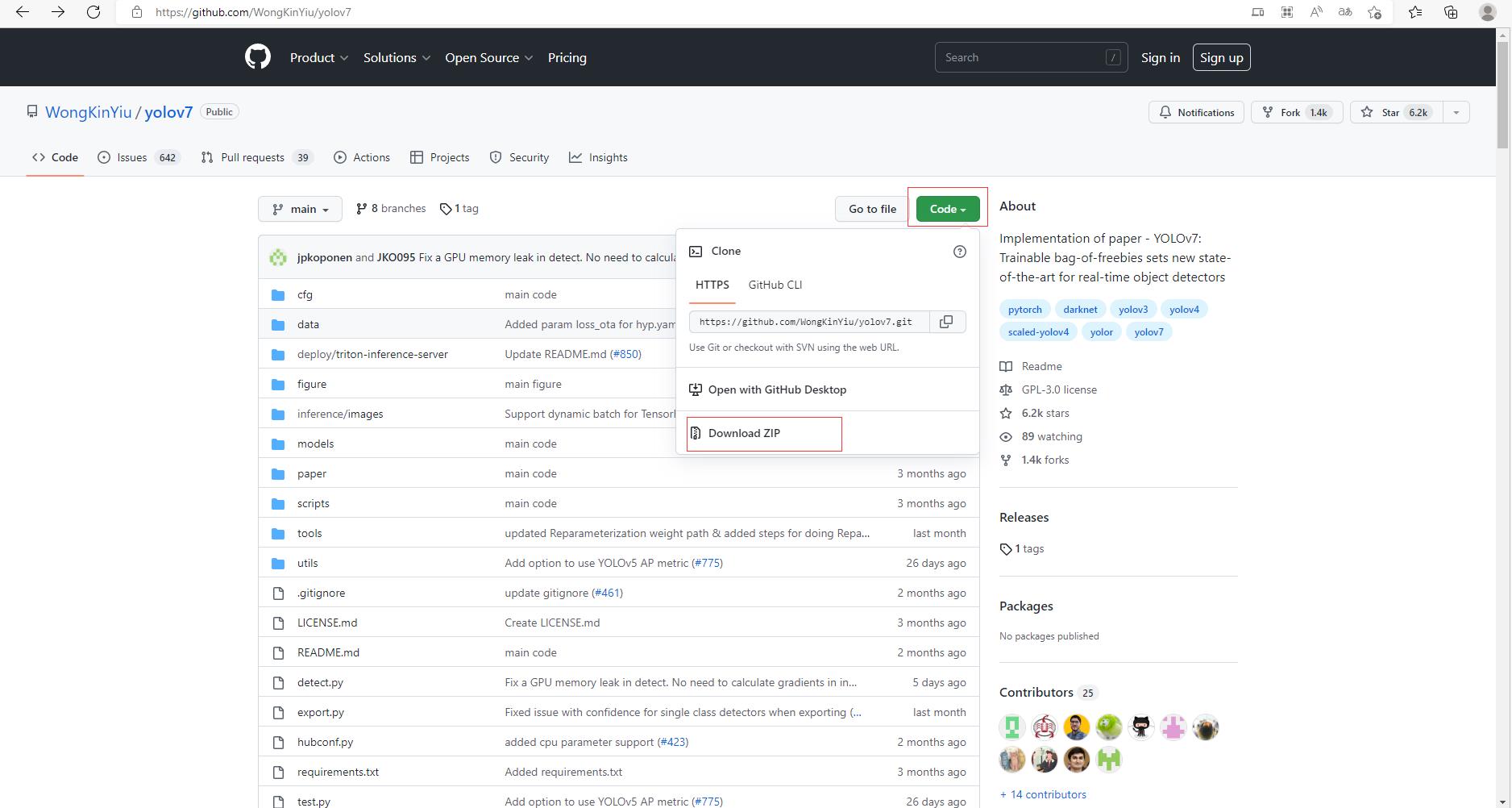
可以上github网站直接下载,也可以使用git命令进行下载,本次教程下载源码的时间是2022.10.13,项目在不断更新,因此不同时间下载,源代码稍有不同(目前只有一个版本,后续应该会出现新版本)。
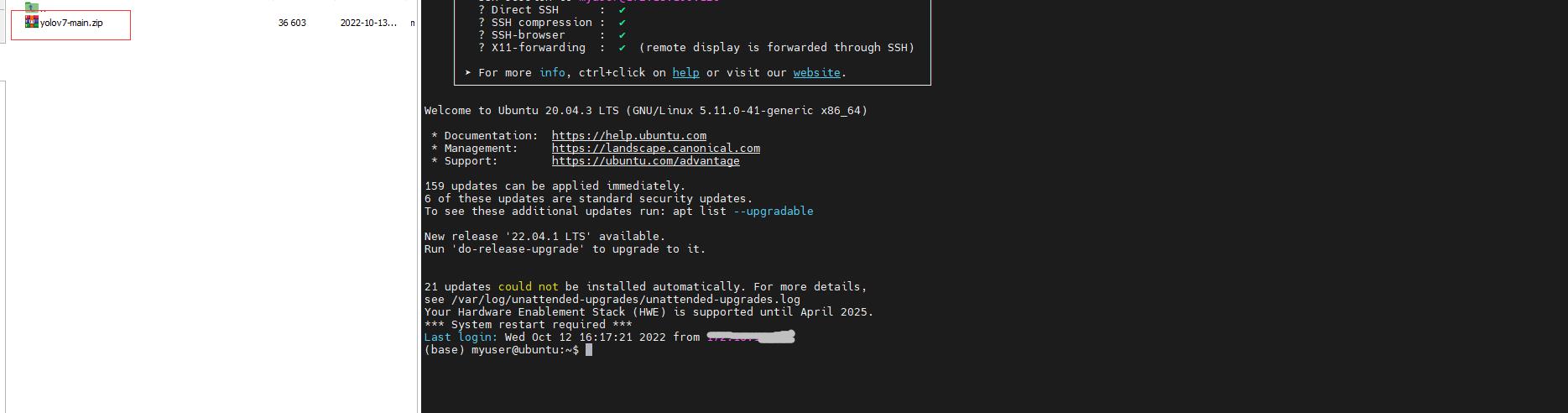
下载得到的源码压缩包:

将源码压缩包上传到GPU服务器上:
解压文件夹:
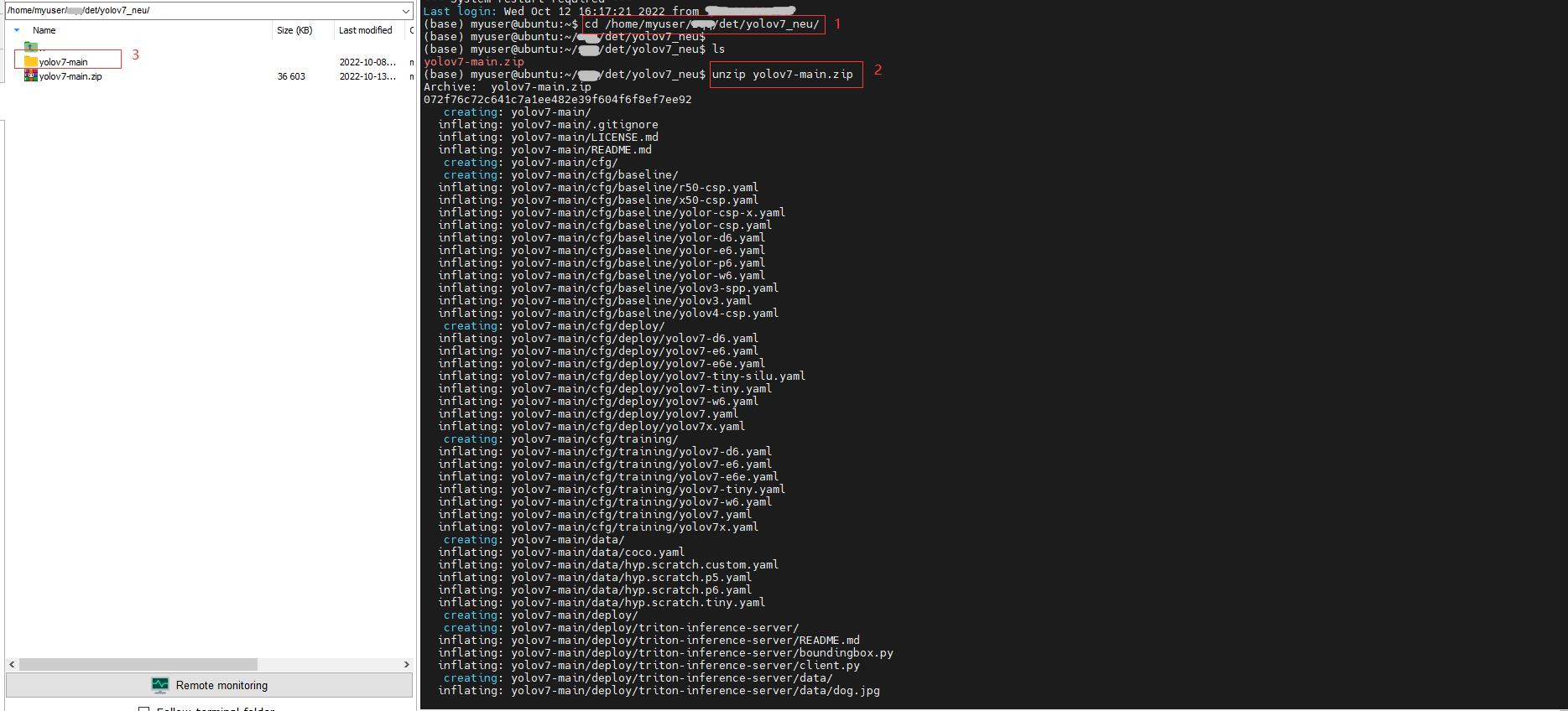
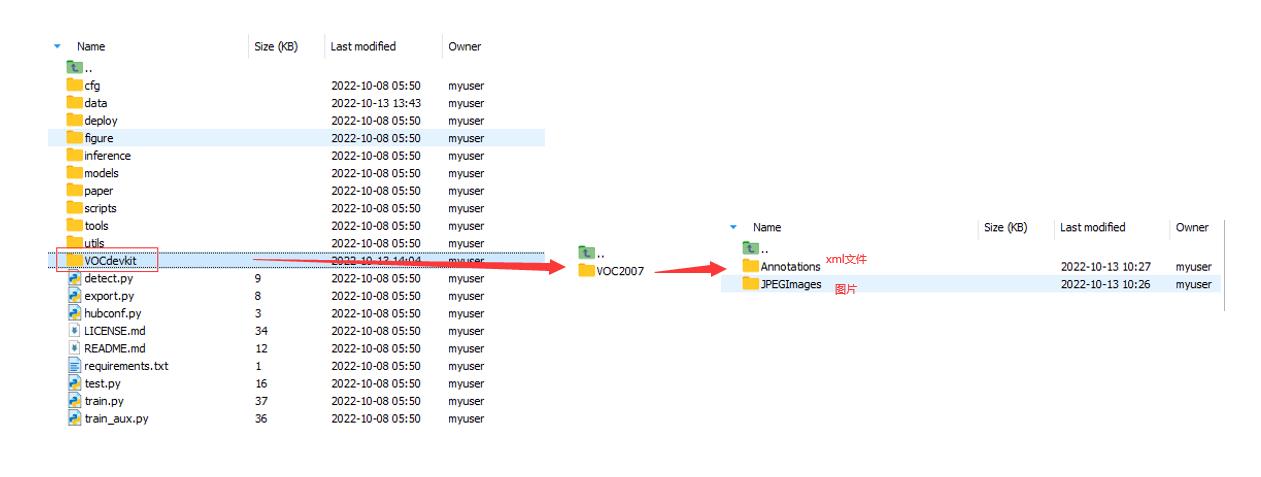
得到的项目结构如下:
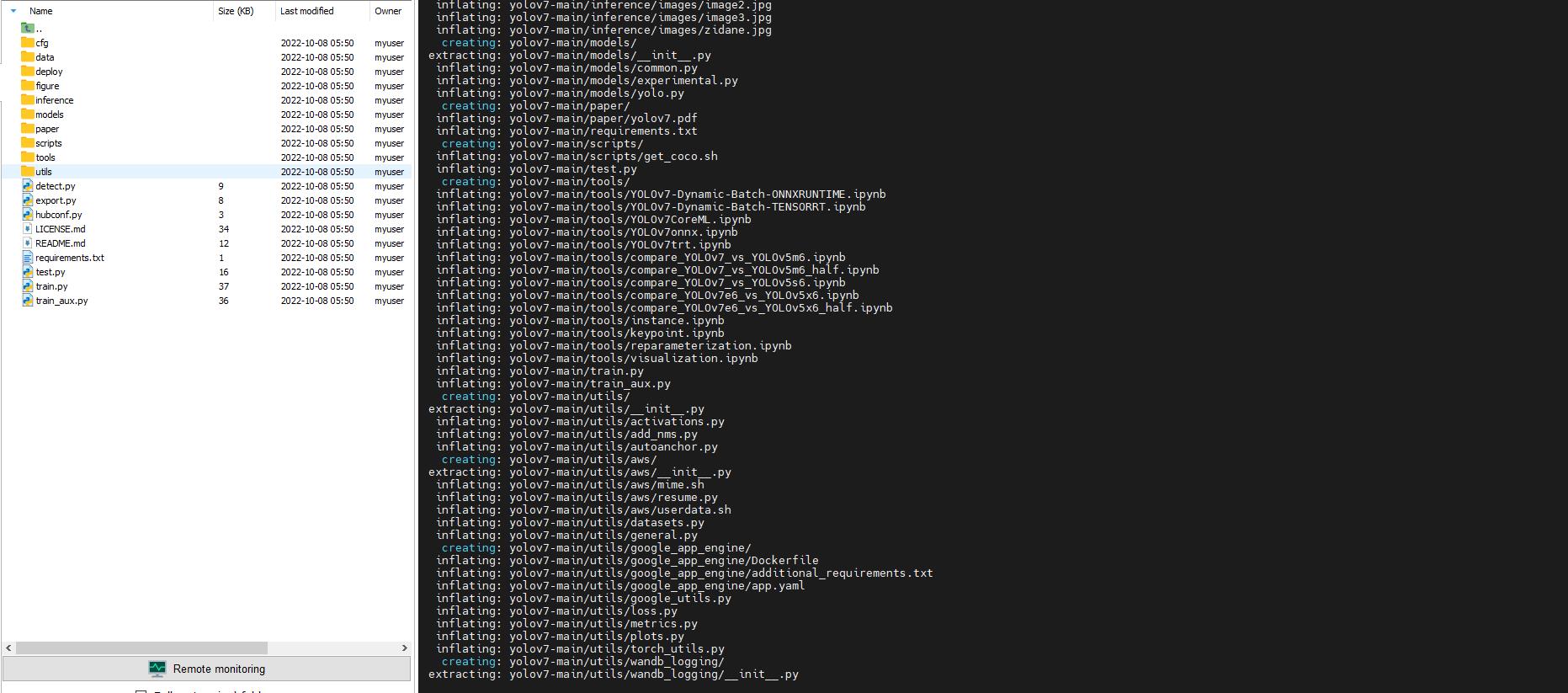
2.准备数据集
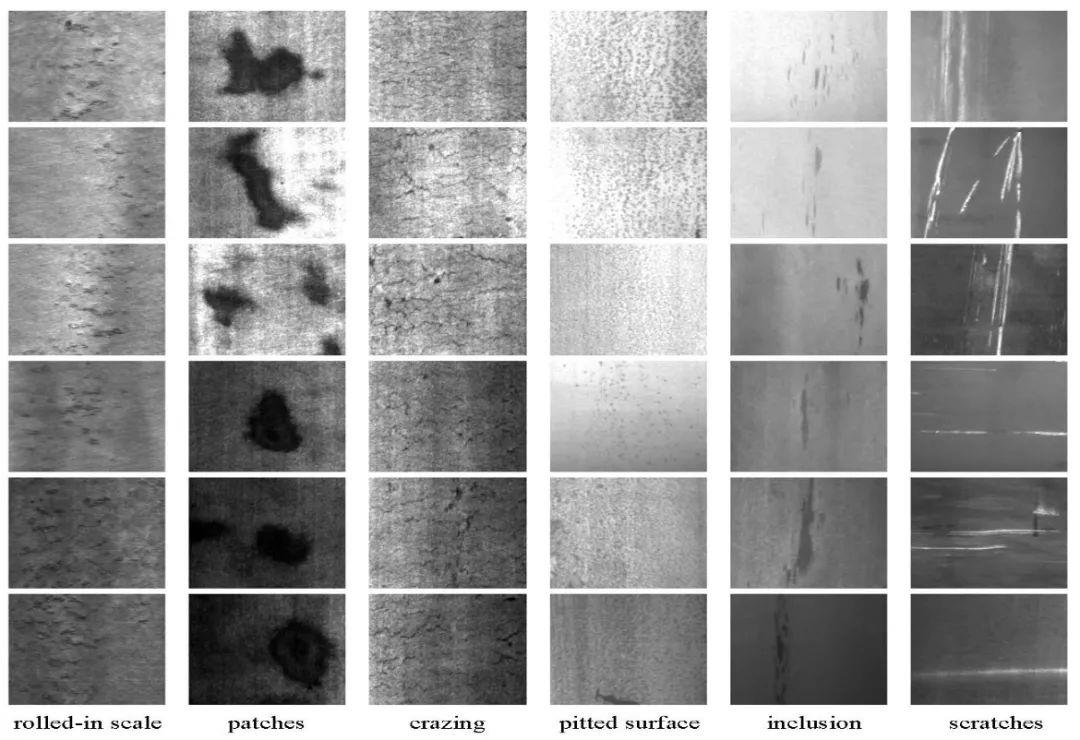
本教程使用的是东北大学带钢表面缺陷检测数据集,该数据集收集了夹杂、划痕、压入氧化皮、裂纹、麻点、斑块6种缺陷,每种缺陷300张图片,图片的尺寸为200×200。
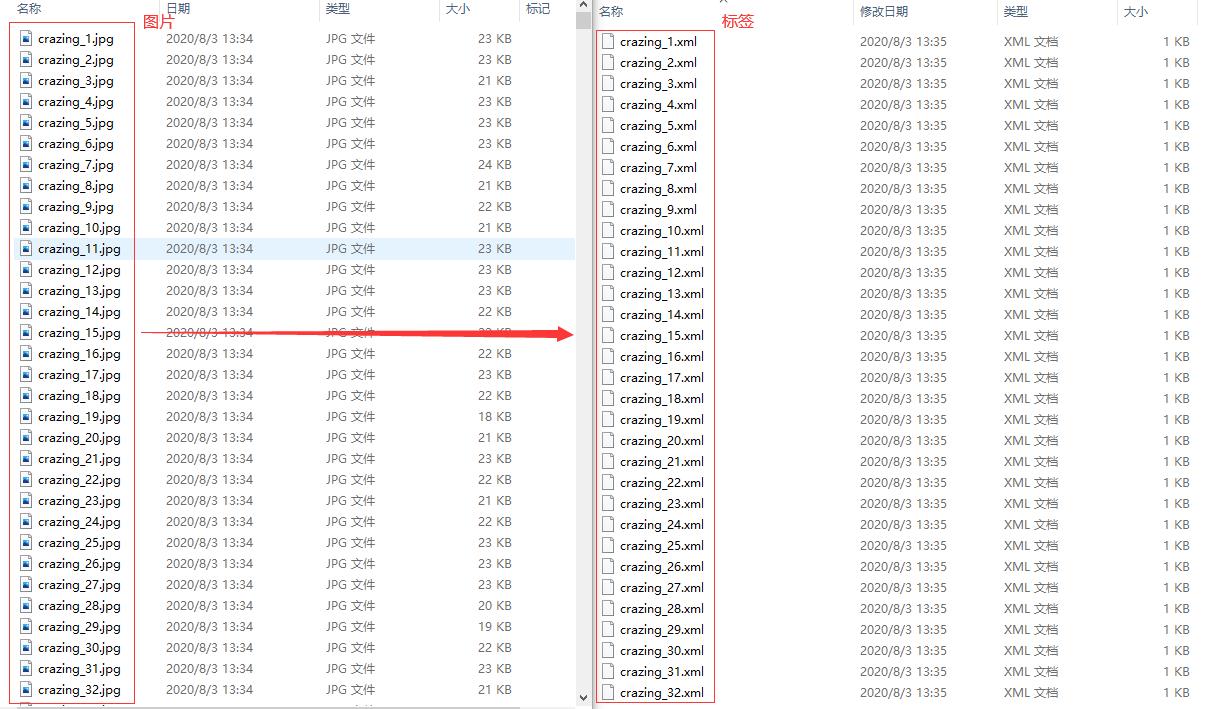
voc格式的数据集,每张图片对应一个xml文件:
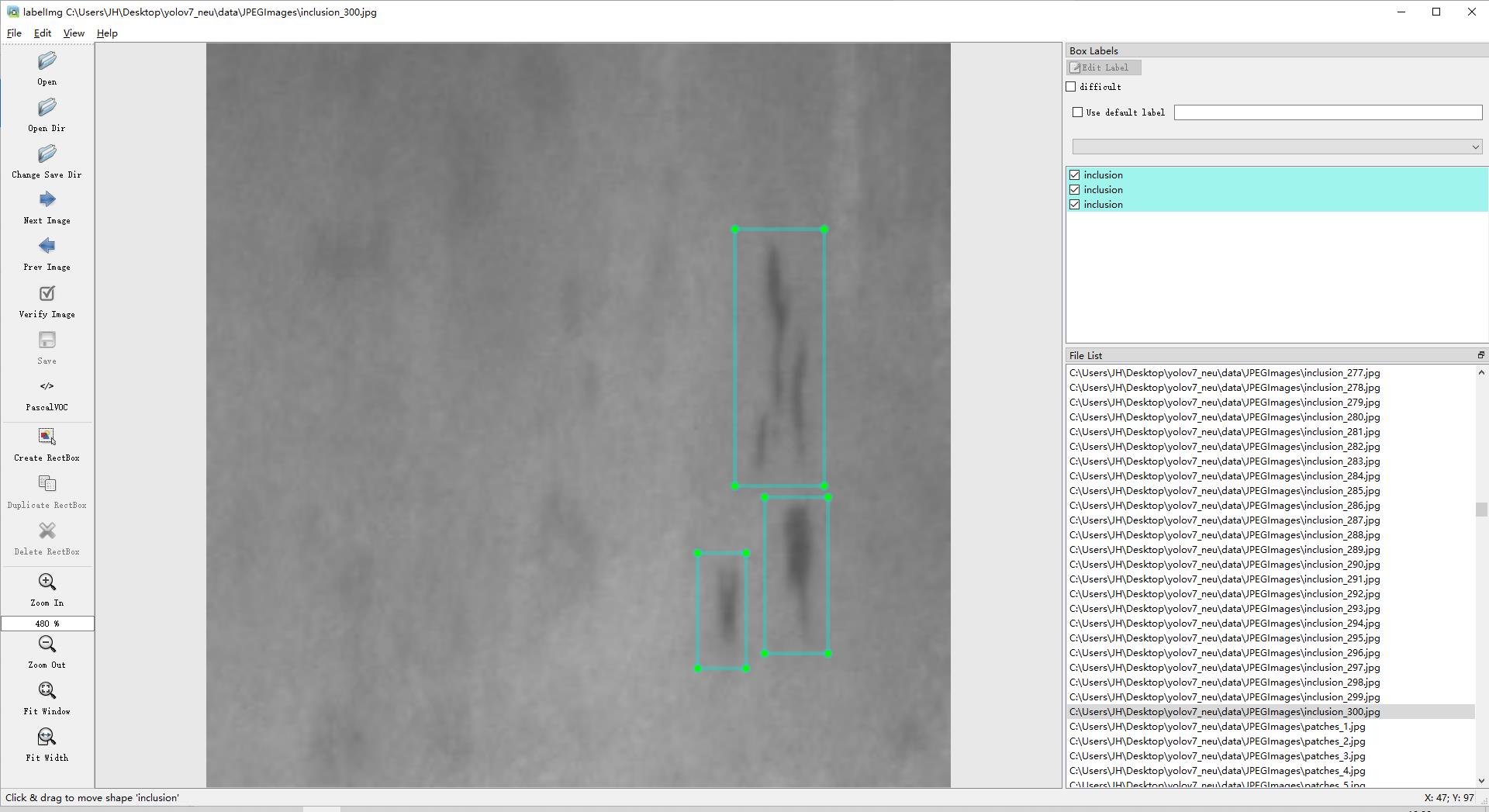
使用labelimg标注工具查看数据:
注:没有labelimg工具的朋友,可以打开本地的Anaconda Prompt窗口进行安装
安装命令为:
pip install labelimg
使用命令:

本数据集在之前的文章中介绍过,想获取数据集的朋友可以查看公众号之前发布的文章。
将数据集上传到GPU服务器的项目目录下:
数据集转换:
编写一个prepare_train_val.py脚本,实现xml文件格式转为yolo文件格式,并实现数据集的划分:

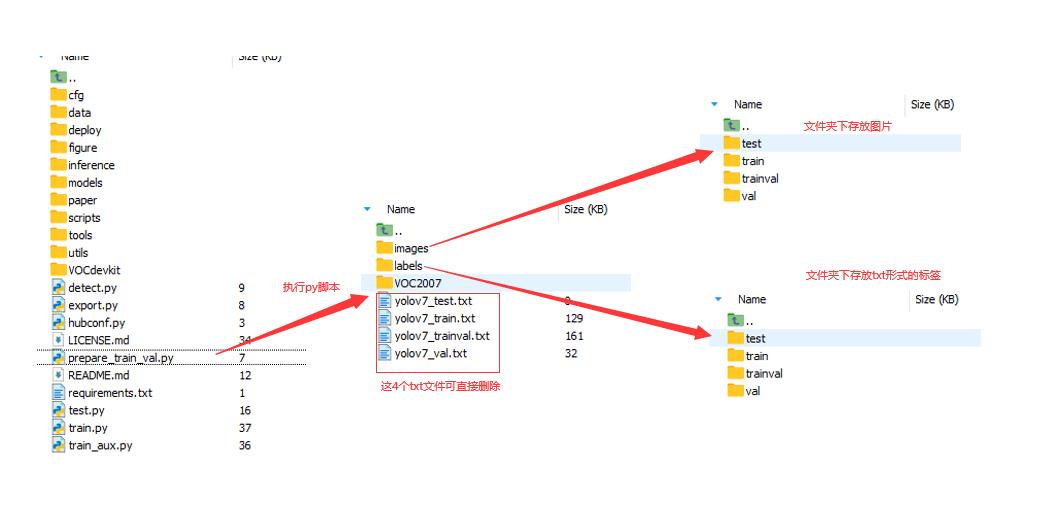
prepare_train_val.py部分代码:
import xml.etree.ElementTree as ET
import pickle
import os
from os import listdir, getcwd
from os.path import join
import random
from shutil import copyfile
classes = ["crazing", "inclusion", "patches", "pitted_surface", "rolled-in_scale", "scratches"]
def clear_hidden_files(path):
dir_list = os.listdir(path)
for i in dir_list:
abspath = os.path.join(os.path.abspath(path), i)
if os.path.isfile(abspath):
if i.startswith("._"):
os.remove(abspath)
else:
clear_hidden_files(abspath)
def convert(size, box):
dw = 1./size[0]
dh = 1./size[1]
x = (box[0] + box[1])/2.0
y = (box[2] + box[3])/2.0
w = box[1] - box[0]
h = box[3] - box[2]
x = x*dw
w = w*dw
y = y*dh
h = h*dh
return (x,y,w,h)
def convert_annotation(image_id):
in_file = open('VOCdevkit/VOC2007/Annotations/%s.xml' %image_id)
out_file = open('VOCdevkit/VOC2007/YOLOLabels/%s.txt' %image_id, 'w')
tree=ET.parse(in_file)
root = tree.getroot()
size = root.find('size')
w = int(size.find('width').text)
h = int(size.find('height').text)
for obj in root.iter('object'):
difficult = obj.find('difficult').text
cls = obj.find('name').text
if cls not in classes or int(difficult) == 1:
continue
cls_id = classes.index(cls)
xmlbox = obj.find('bndbox')
b = (float(xmlbox.find('xmin').text), float(xmlbox.find('xmax').text), float(xmlbox.find('ymin').text), float(xmlbox.find('ymax').text))
bb = convert((w,h), b)
out_file.write(str(cls_id) + " " + " ".join([str(a) for a in bb]) + '\\n')
in_file.close()
out_file.close()
prepare_train_val.py完整代码获取:
https://blog.csdn.net/AugustMe/article/details/127320880
3.配置环境
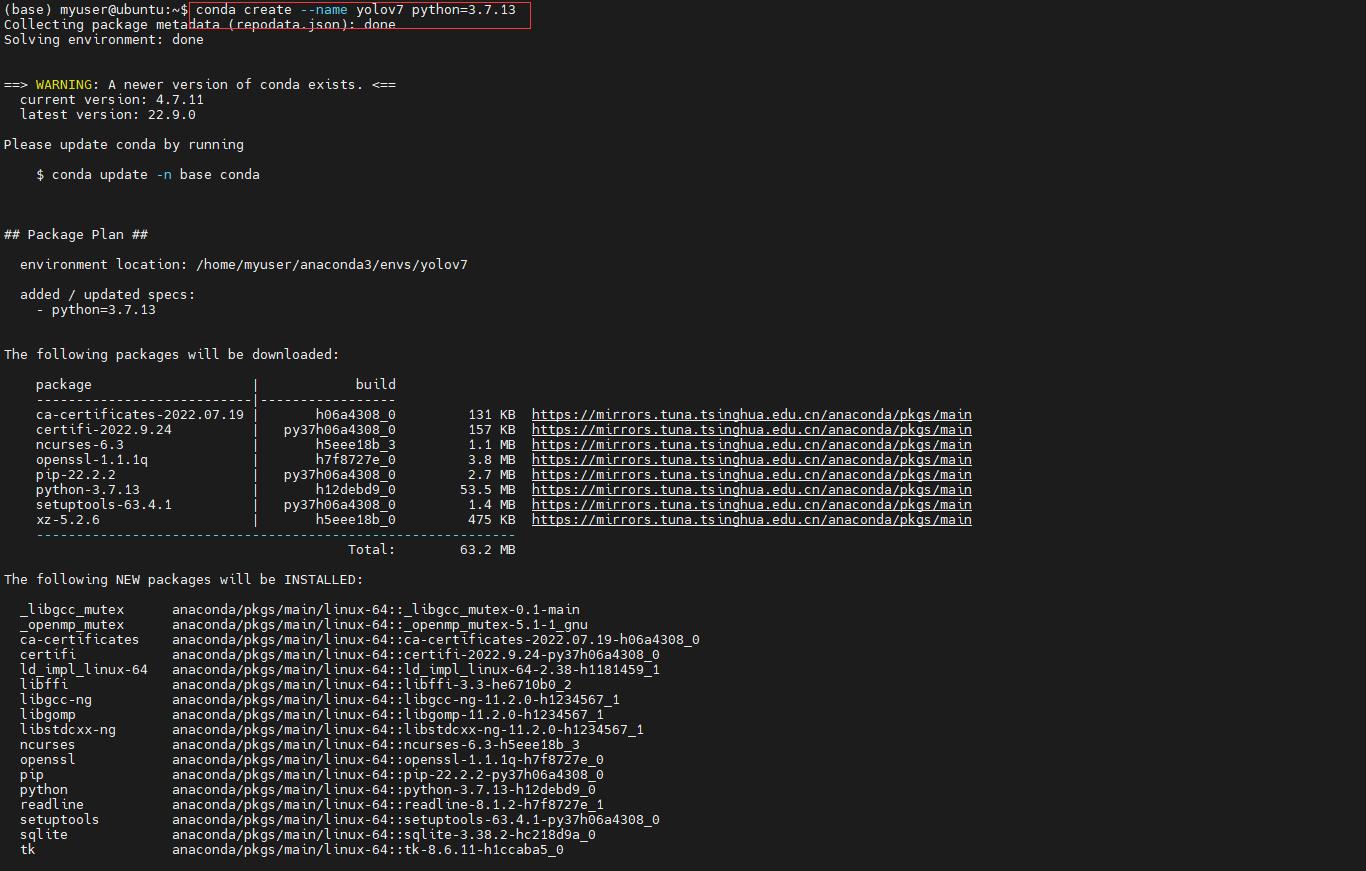
本项目在Ubuntu 20.04系统,2张Tesla P100显卡下进行的。为本项目新建一个虚拟环境,当然,也可以使用现有的环境;新建环境的好处是避免破坏之前项目的环境:
conda create --name yolov7 python=3.7.13
yolov7虚拟环境新建好之后,激活它:
conda activate yolov7

这样,我们就可以在yolov7虚拟环境下安装一系列的库。
根据requirements.txt中的内容,安装依赖库。
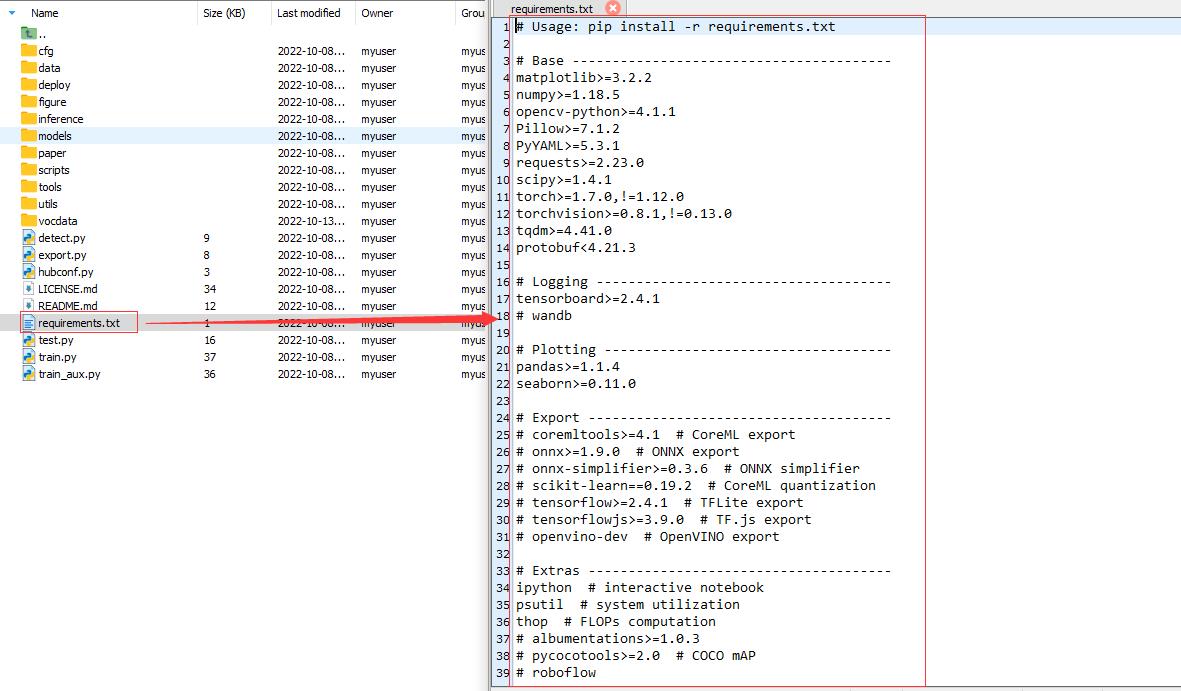
例如安装torch、torchvision:
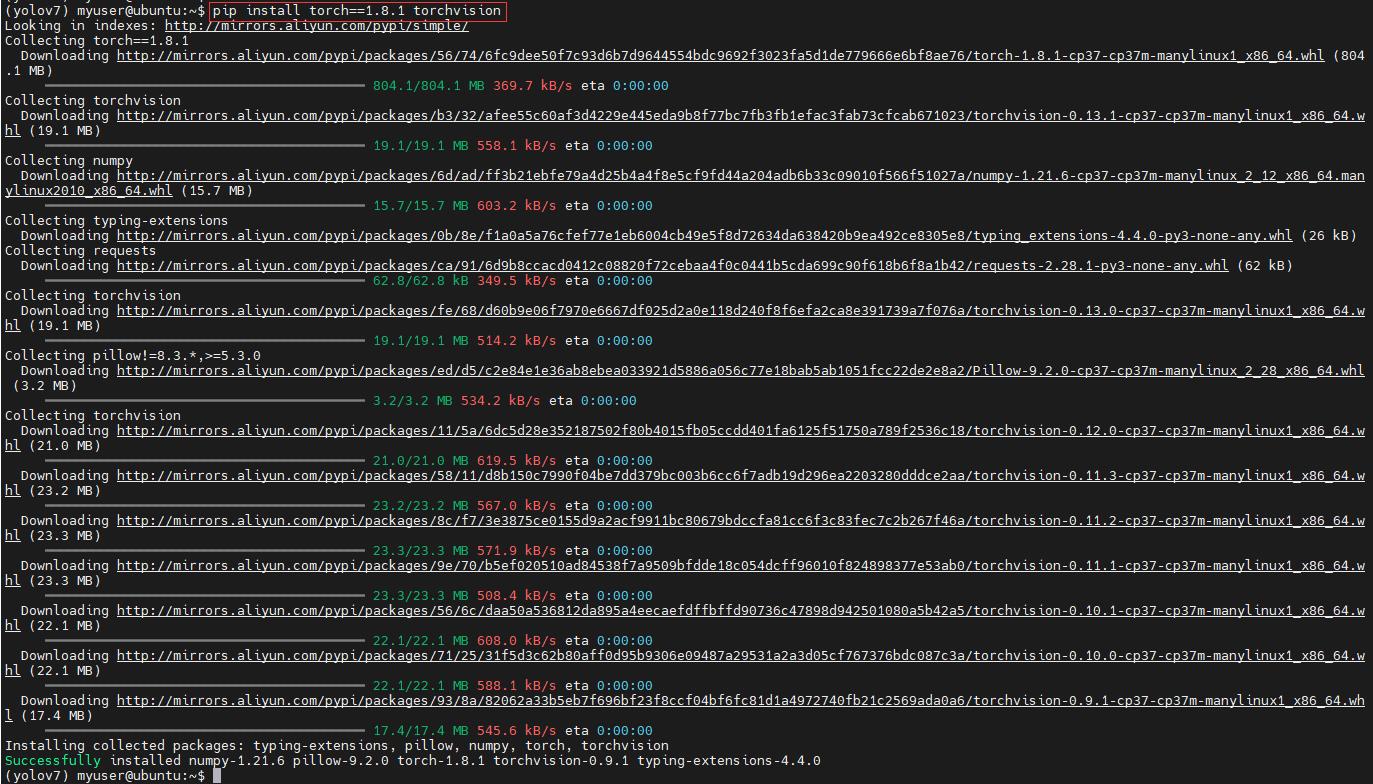
查看GPU版本的torch是否安装成功:

显示True,说明安装成功。
其他依赖库也是通过pip来安装:

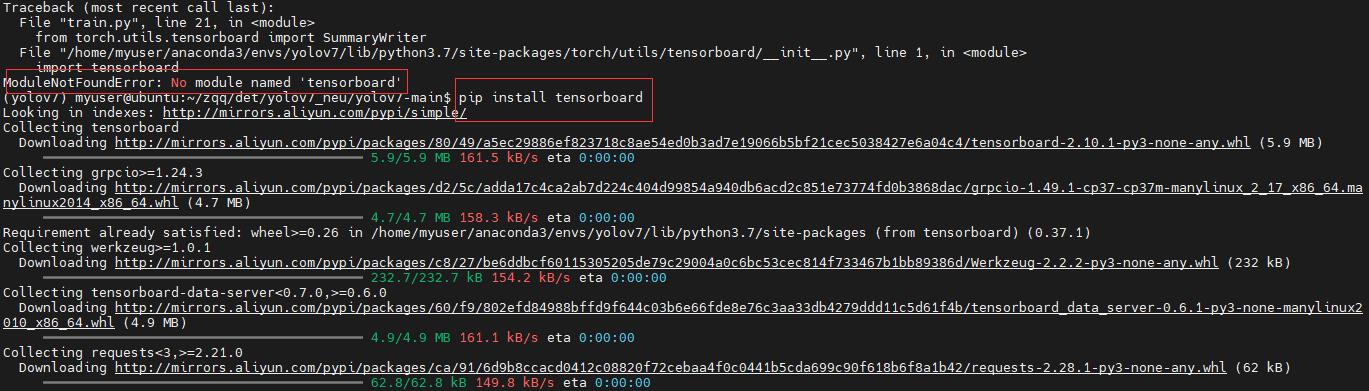
剩余依赖库的安装不再赘述。
4.配置文件
在data文件夹下新建一个voc_neu.yaml文件(可以自定义命名):
写入内容如下:
# 注意路径,否则会报错
train: /home/myuser/det/yolov7_neu/yolov7-main/VOCdevkit/images/train
val: /home/myuser/det/yolov7_neu/yolov7-main/VOCdevkit/images/val
nc: 6
names: ['crazing', 'inclusion', 'patches', 'pitted_surface', 'rolled-in_scale', 'scratches']
由于yolov7提供了好几个模型:
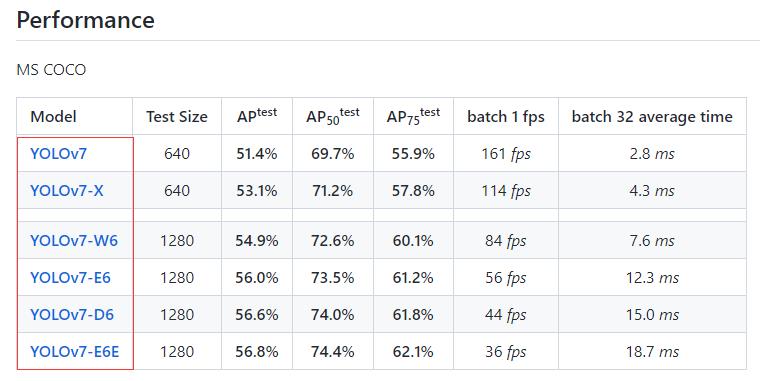
我们每一次训练只能使用一个,因此需要在cfg/training/(和cfg/deploy/文件夹下的并不是一样的,后面慢慢介绍)文件夹下选一个模型:
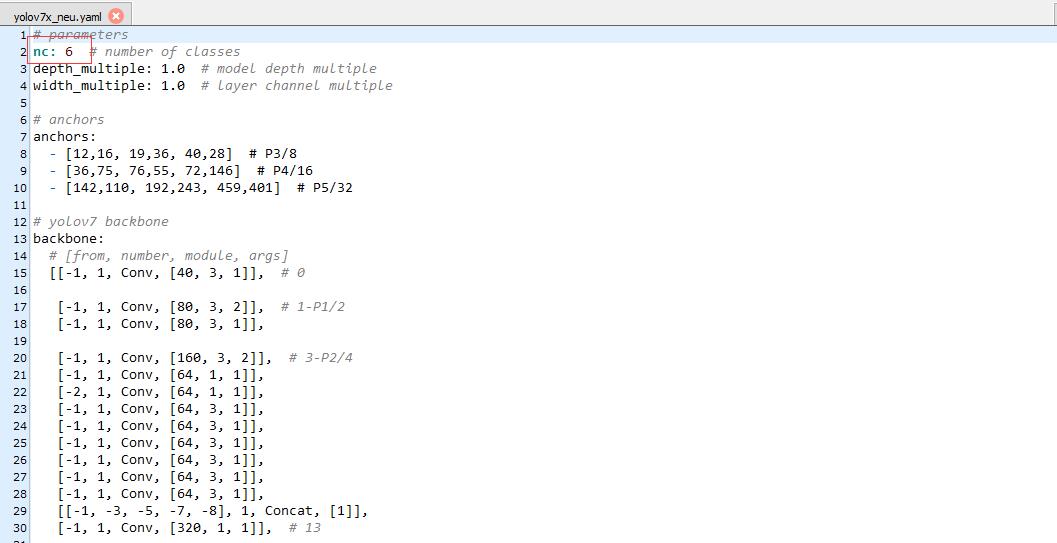
我们选用yolov7x模型,将yolov7x.yaml的内容复制到新建的yolov7x_neu.yaml,并修改类别数量:
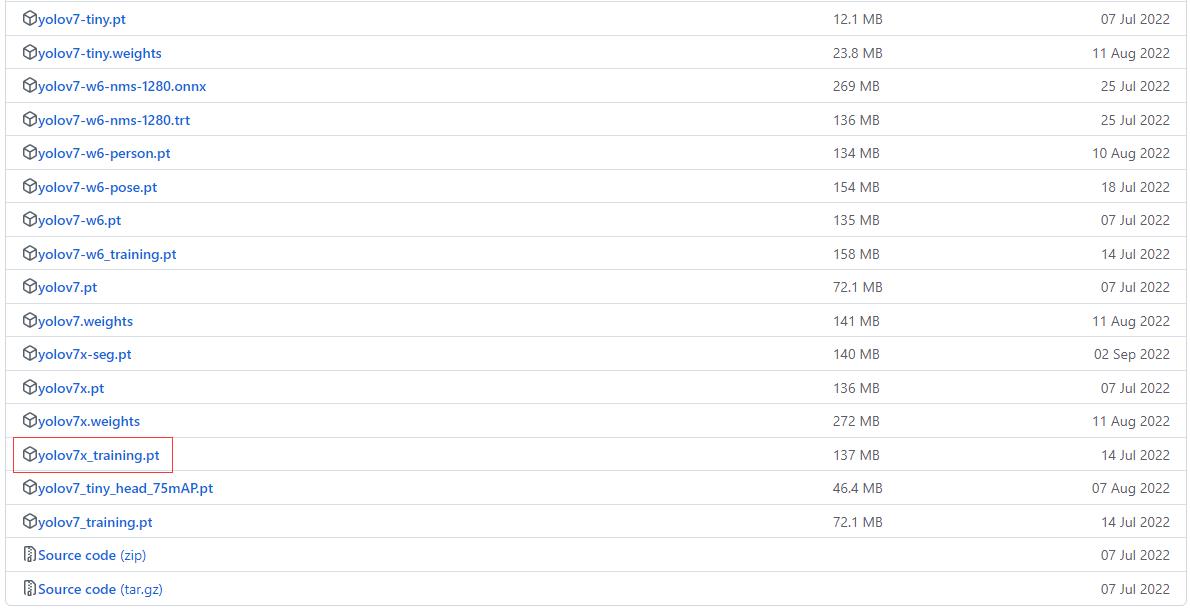
下载预训练模型(我们使用的是cfg/training/下的yolov7x模型,所以下载yolov7x_training.pt预训练模型):
在项目下新建一个weights文件夹,将yolov7_training.pt放入:
5.训练
切换到项目所在目录,执行命令:
# 指定预训练权重、模型结构、图片路径、训练轮数、批次大小、图片大小
python train.py --weights weights/yolov7x_training.pt --cfg cfg/training/yolov7x_neu.yaml --data data/voc_neu.yaml --epochs 100 --batch-size 16 --img-size 640 --project runs/train
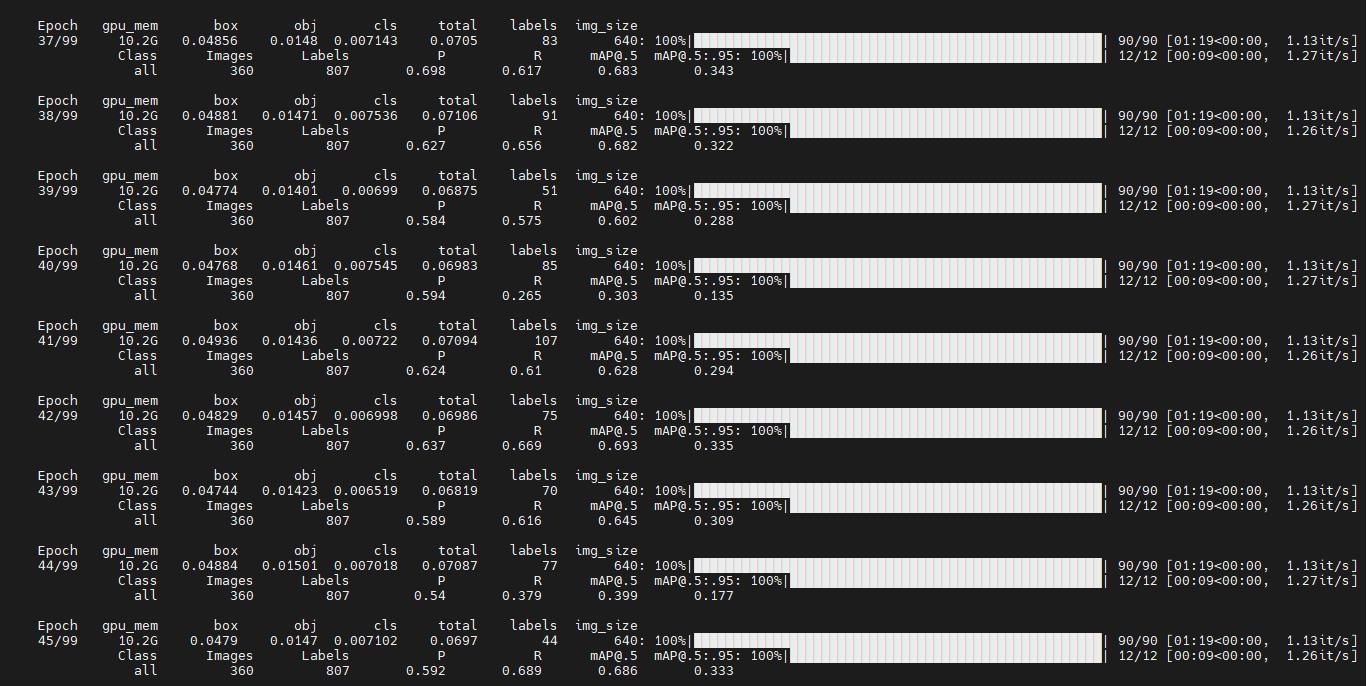
开始训练:
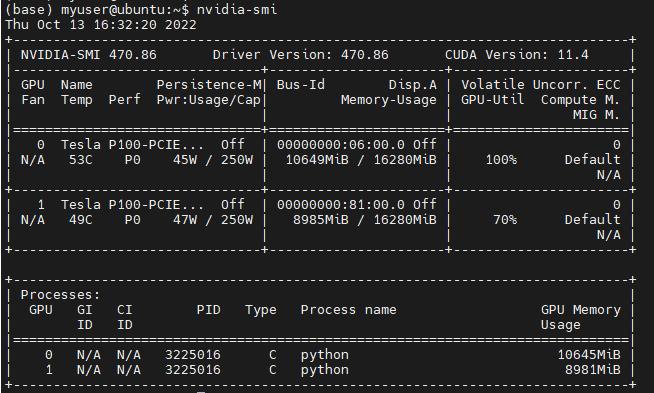
查看GPU使用情况:
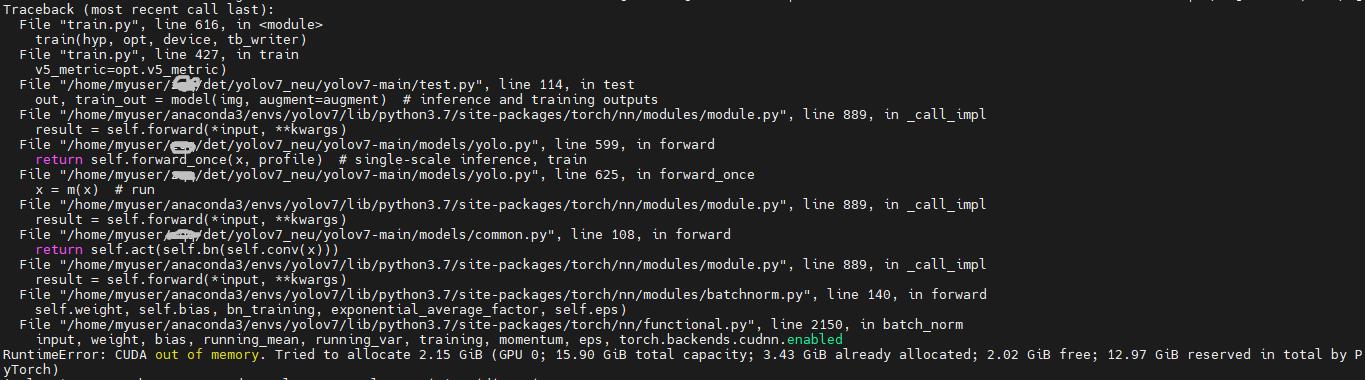
batch-size的大小不宜过大,否则出现内存溢出的错误:
训练结束:

6.测试
将待测试的图片放入testpics文件夹:

执行命令:
# 指定训练好的模型、测试图片路径、图片大小
# 检测多张
python detect.py --weights runs/train/exp/weights/best.pt --source testpics --img-size 640 --project runs/detect
# 检测单张
python detect.py --weights runs/train/exp/weights/best.pt --source testpics/patches_166.jpg --img-size 640 --project runs/detect
在runs/detect文件夹下查看检测结果:
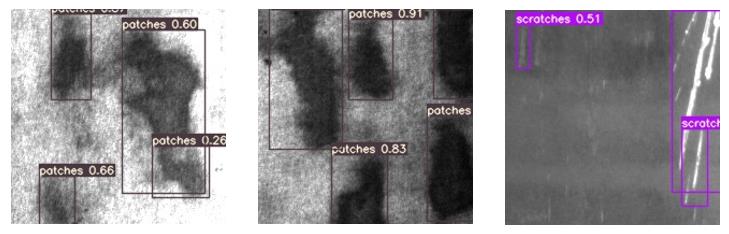
7.结论
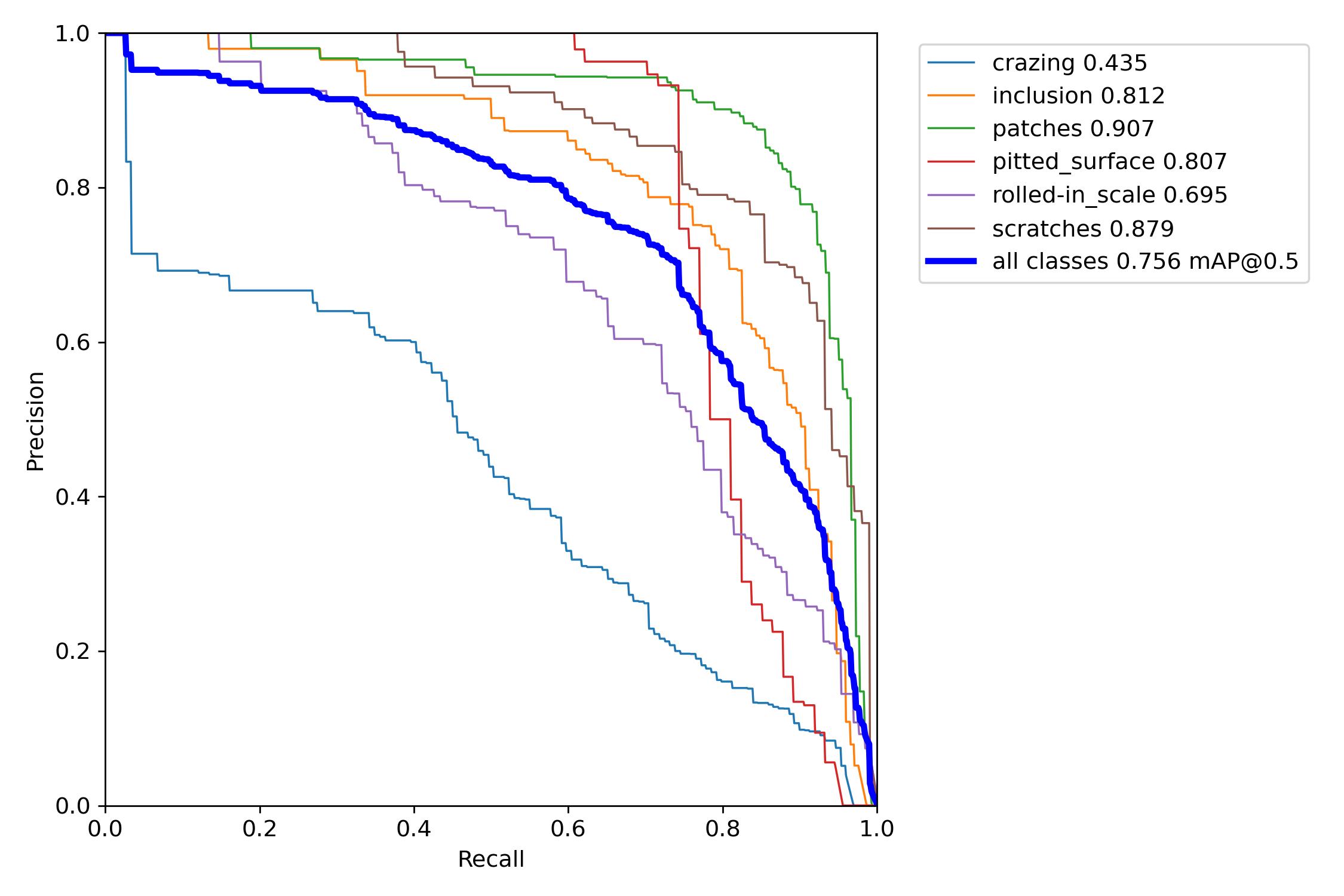
六个类别的mAP@0.5为0.756,总体上可以实现缺陷的检测。其实,这个数据集的质量也不是很高,才导致各项指标不是特别高。永远记住:数据决定上限,模型决定下限,“算法不是最diao的,数据才是”。
模型训练完以后,还有很多工程要做,如何提高检出率,降低过检率;以及怎么部署就得折腾一番,后面我会继续更新表面缺陷检测系列文章。
看到这里了,用你那发财的小手,给我点一个赞再走呗。

参考资料
[1]https://github.com/WongKinYiu/yolov7
[2]https://zhuanlan.zhihu.com/p/547878330
以上是关于木材表面缺陷如何检测?的主要内容,如果未能解决你的问题,请参考以下文章