倍福TwinCAT(贝福Beckhoff)常见问题(FAQ)-如何配置虚拟轴 TC3
Posted gary_tao的个人博客
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了倍福TwinCAT(贝福Beckhoff)常见问题(FAQ)-如何配置虚拟轴 TC3相关的知识,希望对你有一定的参考价值。
在Motion上添加一个NC Task

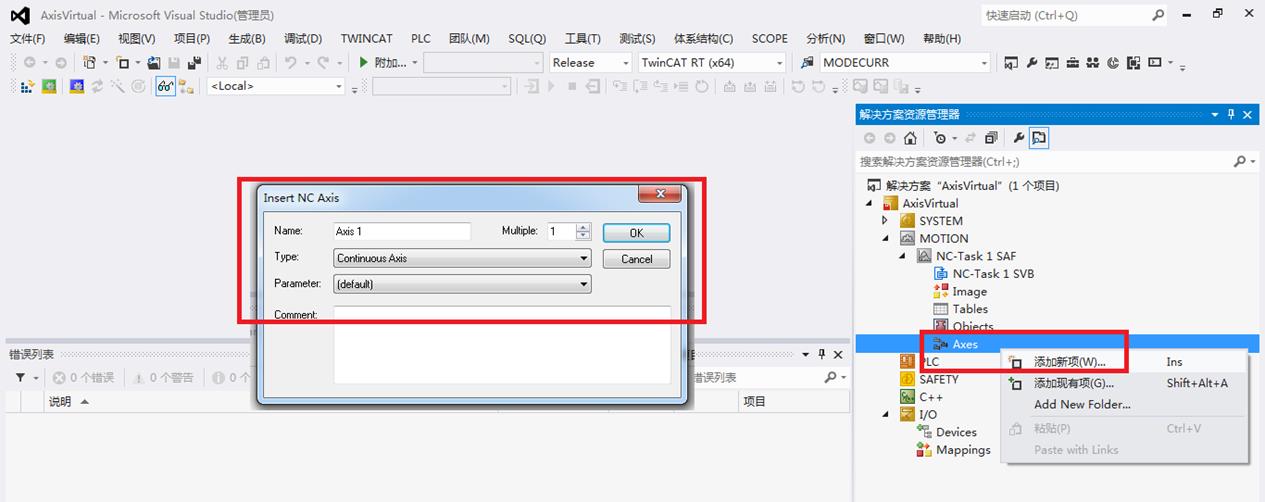
在Axis上右击添加一个轴,类型为Continuous Axis
在PLC上右击添加新项,然后添加一个PLC项目

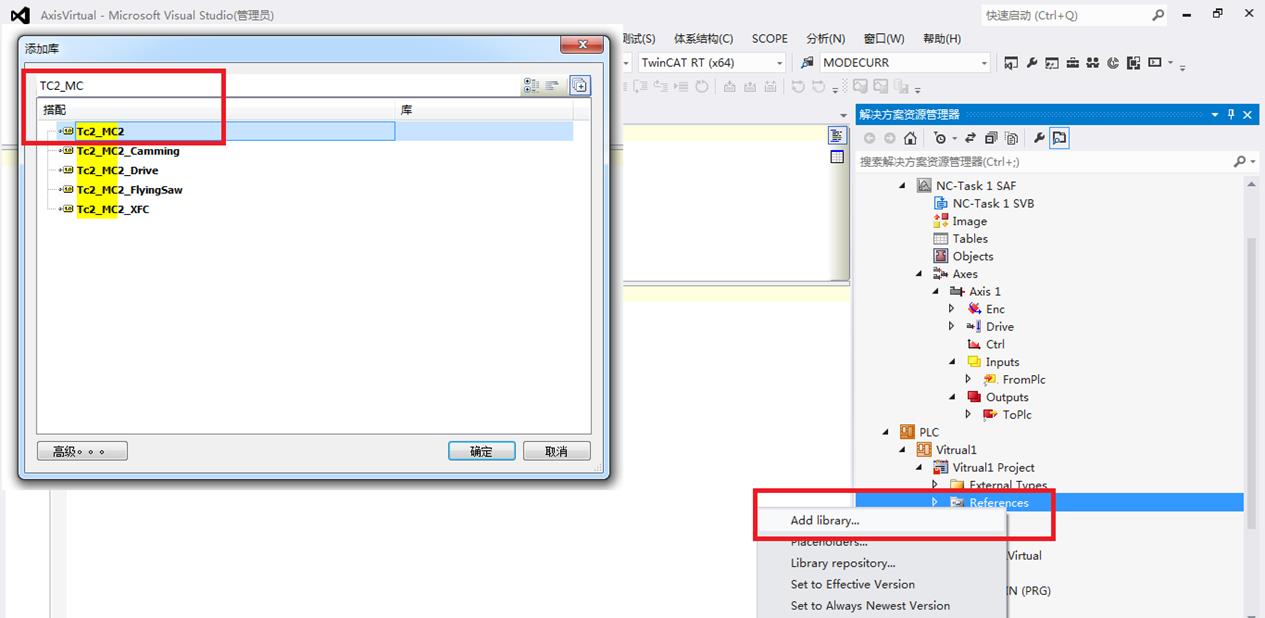
在引用中添加TC2_MC2的库引用
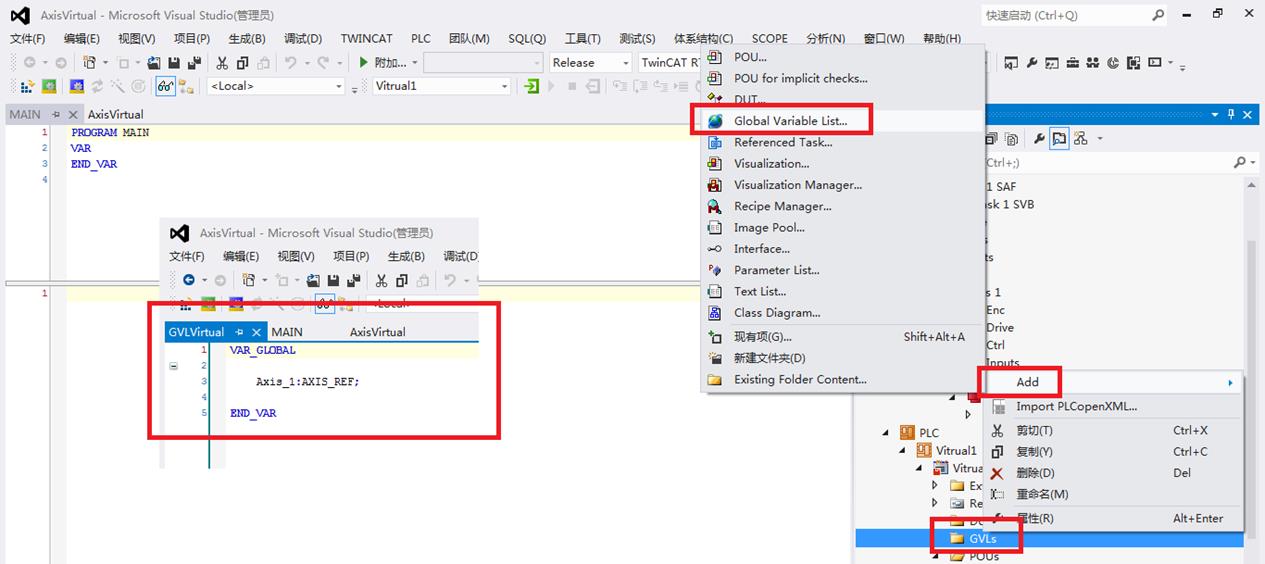
添加一个全局的变量,定义AXIS_REF变量类型
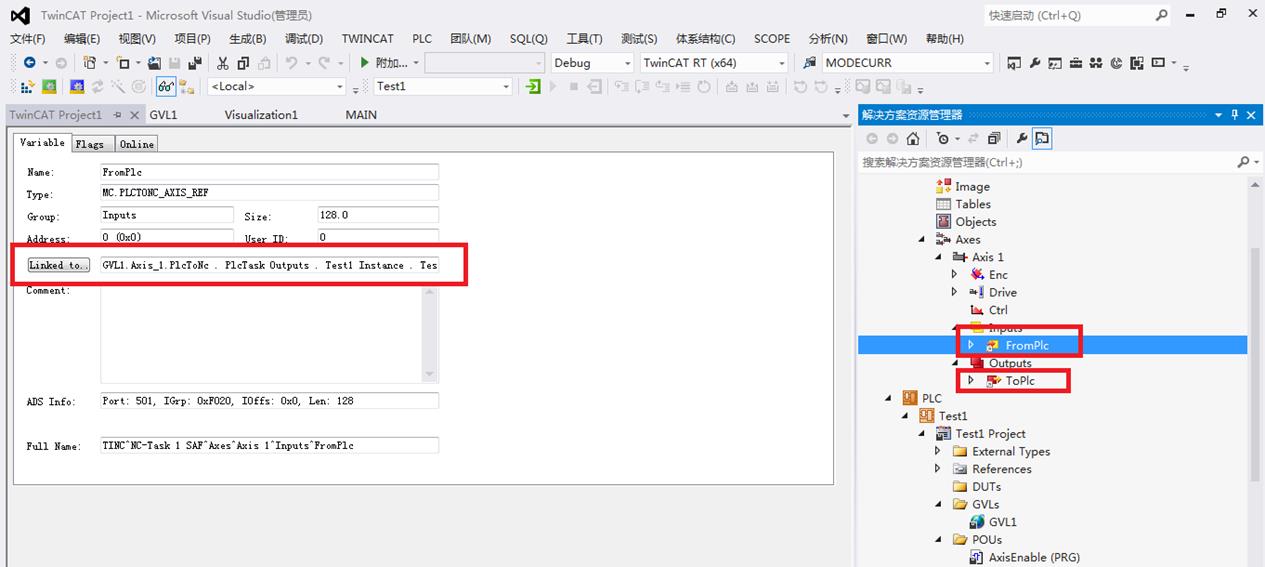
重新编译一下,然后在Settings中Link To PLC,选择刚才的全局变量
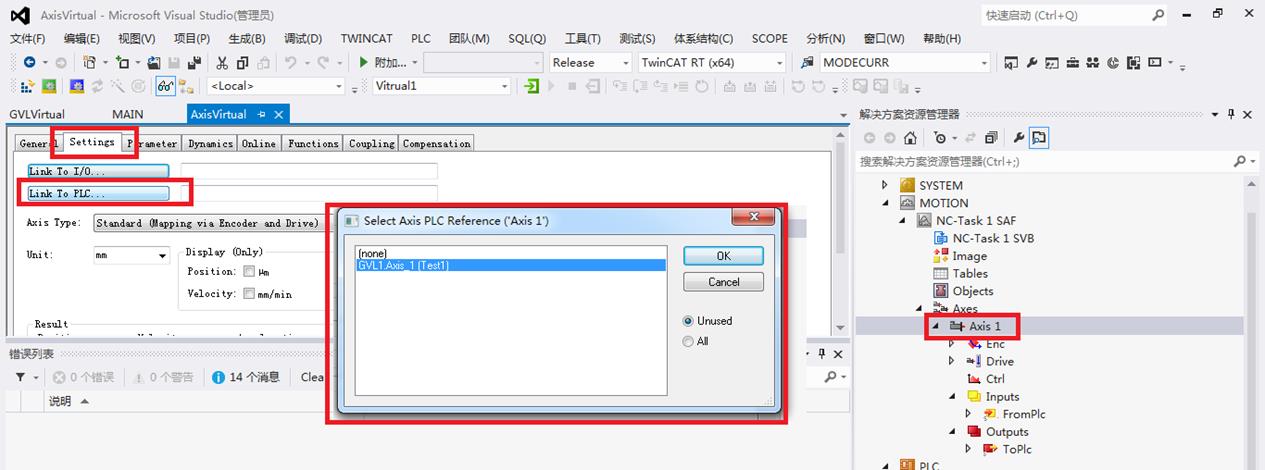
由于是TC3,前面做好之后,这里的轴的Input和Output都会自动链接好
此时切换到轴的Online页面下,点击Activate Configuration,已经可以测试这个虚拟轴了

点击Set按钮,然后勾选三个选项,点击All,可以让伺服使能,然后点击下面一排按钮可以驱动虚拟轴运动。接下来的部分跟TC2一样编写PLC程序就可以完整的运行了。

更多教学视频和资料下载,欢迎关注以下信息:
我的优酷空间:
http://i.youku.com/acetaohai123

我的在线论坛:
http://csrobot.gz01.bdysite.com/

问题交流:
QQ:910358960
以上是关于倍福TwinCAT(贝福Beckhoff)常见问题(FAQ)-如何配置虚拟轴 TC3的主要内容,如果未能解决你的问题,请参考以下文章
倍福TwinCAT(贝福Beckhoff)常见问题(FAQ)如何在TwinCAT Scope中做变量监控
倍福TwinCAT(贝福Beckhoff)常见问题(FAQ)-如何添加Scope监控
倍福TwinCAT(贝福Beckhoff)常见问题(FAQ)-如何在同一台PC上运行多个TwinCAT程序
倍福TwinCAT(贝福Beckhoff)常见问题(FAQ)-如何使用随机数DRAND模块