Robot Operating System (ROS)学习笔记4---语音控制
Posted 林先森_007
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Robot Operating System (ROS)学习笔记4---语音控制相关的知识,希望对你有一定的参考价值。
搭建环境:XMWare Ubuntu14.04 ROS(indigo)
转载自古月居 转载连接:http://www.guyuehome.com/260
一、语音识别包
1、安装
安装很简单,直接使用ubuntu命令即可,首先安装依赖库:
1 $ sudo apt-get install gstreamer0.10-pocketsphinx 2 $ sudo apt-get install ros-indigo-audio-common 3 $ sudo apt-get install libasound2
安装ROS包:
sudo apt-get install ros-indigo-pocketsphinx
2、测试
安装完成后我们就可以运行测试了。
首先,插入你的麦克风设备,然后在系统设置里测试麦克风是否有语音输入。
然后,运行包中的测试程序:
首先,插入你的麦克风设备,然后在系统设置里测试麦克风是否有语音输入。
然后,运行包中的测试程序:
roslaunch pocketsphinx robocup.launch
运行后,会出现下面的错误:
1 [recognizer-1] process has died [pid 25379, exit code 1, cmd /opt/ros/indigo/lib/pocketsphinx/recognizer.py __name:=recognizer __log:=/home/l/.ros/log/827f0fd0-2ff1-11e7-90b9-000c296e5c8e/recognizer-1.log]. 2 log file: /home/l/.ros/log/827f0fd0-2ff1-11e7-90b9-000c296e5c8e/recognizer-1*.log
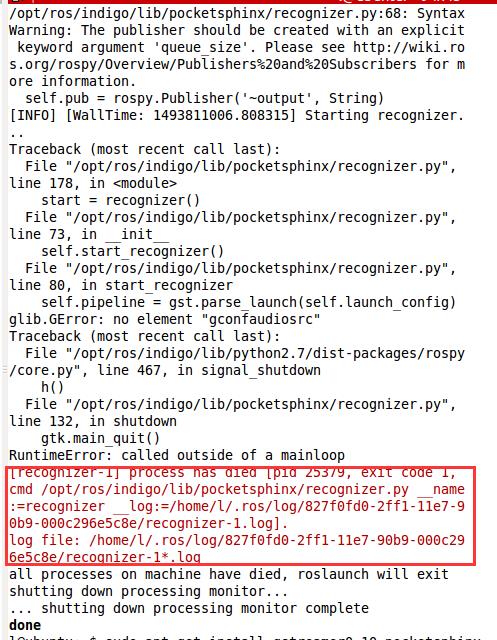
纠正上述错误:在终端输入:
sudo apt-get install gstreamer0.10-gconf
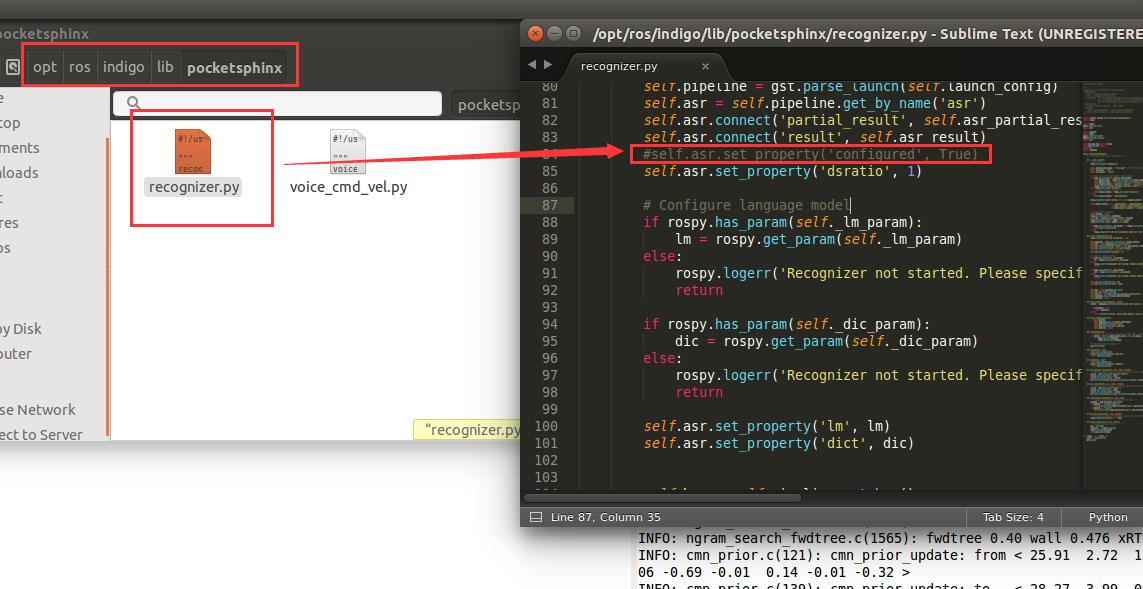
注释掉:/opt/ros/indigo/lib/pocketsphinx/recognizer.py
#self.asr.set_property(\'configured\', True)
2、添加语音库
首先看看例子中要添加的文本信息:
1 $ roscd rbx1_speech/config 2 $ more nav_commands.txt
把下载的文件都解压放在rbx1_speech包的config文件夹下。我们可以给这些文件改个名字:
1 $ roscd rbx1_speech/config 2 $ rename -f \'s/3026/nav_commands/\' *
在rbx1_speech/launch文件夹下看看voice_nav_commands.launch这个文件:
1 <launch> 2 <node name="recognizer" pkg="pocketsphinx" type="recognizer.py" 3 output="screen"> 4 <param name="lm" value="$(find rbx1_speech)/config/nav_commands.lm"/> 5 <param name="dict" value="$(find rbx1_speech)/config/nav_commands.dic"/> 6 </node> 7 </launch>
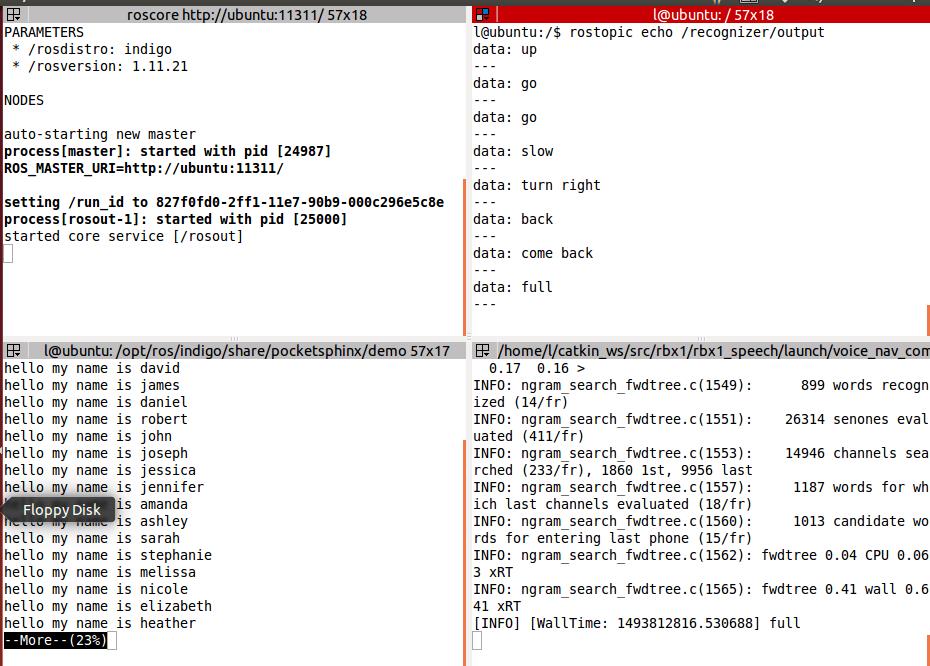
通过之前的命令来测试一下效果
1 $ roslaunch rbx1_speech voice_nav_commands.launch 2 $ rostopic echo /recognizer/output
以上是关于Robot Operating System (ROS)学习笔记4---语音控制的主要内容,如果未能解决你的问题,请参考以下文章