第十九课 pluginlib&Nodelet
Posted 郭润
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了第十九课 pluginlib&Nodelet相关的知识,希望对你有一定的参考价值。
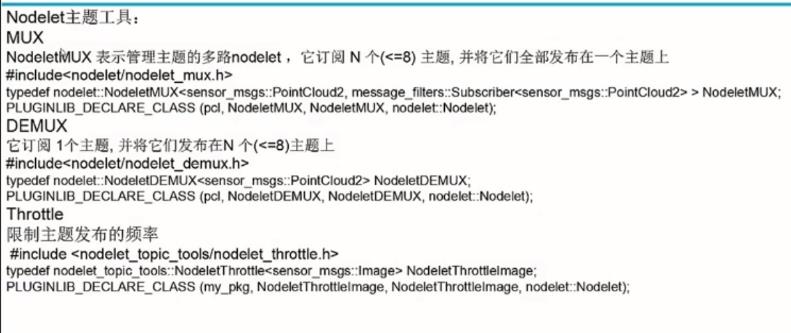
把rgb摄像头的数据转换为laser的时候使用了Nodelet.
pluginlib(插件库)

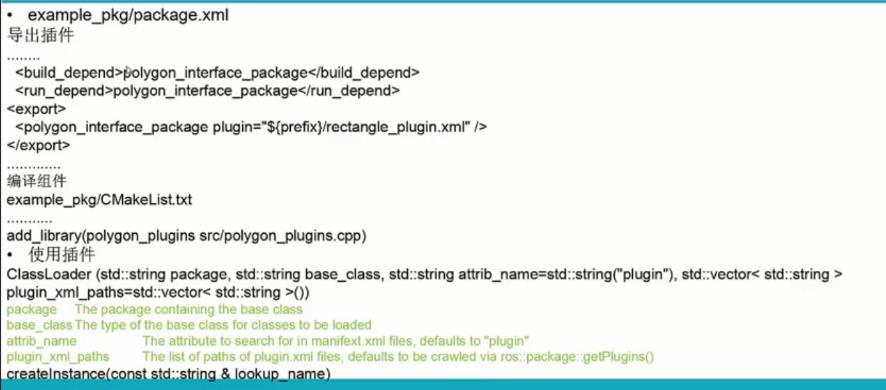
在ros中有一个plugin的包,下面是一个ROS Plugin Registration的例子

上面包含一个polygon_interface多边形接口,它包含了两个插件,第一个插件是rectangle_plugin(矩形),第二个插件是triangle_plugin(三角形),他们都是通过class list export导出到Polygon_interface中,然后在Polygon plugins list中就有了rectangle以及triangle;使用rospack plugins --attrib=plugin polygin_interface就可以找到polygon_interface里面的插件.
导出插件
注册插件
example_pkg/src/class_list.cpp
首先要包含几个头文件
#include<pluginlib/class_list_macros.h>//注册插件
#include<polygon_interface_package/polygon.h>//包含基类的头文件
#include<rectangle_package/rectangle.h>//插件的头文件
//Declare the Rectangle as a Polygon class
PLUGINLIB_EXPORT_CLASS(rectangle_namespace::Rectangle,polygon_namespace::Polygon)//第一个参数为用于导出的类型,第二个参数为基类的类型,插件的参数类型包括命名空间以及类名,以及基类的命名空间和类型.
如何添加到ROS工具链
example_pkg/rectangle_plugin.xml
<library path="lib/librectangle">//首先指定了库的路径
<class type="rectangle_namespace::Rectangle" base_class_type="polygon_namespace::Polygon">//包含一个class参数,类型为插件类型和基类类型
<description>
this is a rectangle plugin
</description>
</class>
</library>
如何导出插件
上面是在基类的包里面.
如何使用插件
ClassLoader,包含了四个参数,一个是基类的包,基类类型,属性的名字,插件xml的路径
下面是一个实例createInstance(const std::string &lookup_name)
.....
Nodelet
nodelet对于提高ROS性能有着重要的地位,特别是在视觉,控制,高频和高带宽程序中.
nodelet的优势:
在一个线程上运行多个算法
nodelet之间传输数据无需拷贝(在一个nodelet管理器下,使用boost共享指针)
作为插件动态载入
和节点相似性高
基本用法

在manager上启动pkg/Type类型的nodelet

在一个单独的节点上启动pkt/Type类型的nodelet

从manager上卸载名字为name的nodelet

启动一个nodeletmanager节点
它的API
公有成员参数

上面是一个初始化函数规定了nodelet该如何启动,
下面是构造函数和析构函数

保护成员函数


下面是它的实例
首先去启动一下它里面的launch文件,
roslaunch nodelet_tutorial_math plus.launch
rostopic pub /Plus2/in std_msgs/Float64 5.0 -r 10
rostopic echo /Plus3/out
最后总结:
很好的一个网址https://github.com/tue-robotics
以上是关于第十九课 pluginlib&Nodelet的主要内容,如果未能解决你的问题,请参考以下文章