《机电传动控制》第二周作业
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了《机电传动控制》第二周作业相关的知识,希望对你有一定的参考价值。
1. 对电机发展史的感悟
电机的发明起始于19世纪上叶,那时人们对其中的物理原理还不是很清楚,他们甚至认为发电机和电动机是两种不同完全的东西,但却对电机的应用有着深刻的理解,后来随着一代一代科学家的努力,电机的结构和功效得到了极大的突破,人们也从直流电的时代跨越到了交流电的时代。说起直流电和交流电,就不得不提及爱迪生和特斯拉,或许我们大多数人都知道爱迪生,对特斯拉却知之甚少,其实论起发明创造他们两个不分伯仲,而且特斯拉比爱迪生有更长远的科学眼光。
他们的故事要从1884年说起,这一年,特斯拉第一次踏上美国国土,来到了纽约。除了前雇主查尔斯•巴奇勒所写的推荐函外,他几乎是一无所有。这封信是写给托马斯•爱迪生的,信中提到:“我知道有两个伟大的人,你是其中之一,另一个就是这个年轻人了。” 爱迪生立即雇用了特斯拉。
特斯拉和爱迪生天生就属于水火不相融的人,他们两人之间存在严重的分歧。爱迪生注重实践,是位凭经验在摸索中进行发明的人;特斯拉是那种注重理论的人,他觉得爱迪生的做法是十分愚蠢的,他认为实验必须要有理论依据做基础,而不是像爱迪生那样光一根灯丝就做了10000多种尝试。有一次,特斯拉同爱迪生谈论起发电机的几种潜在的改革可能,爱迪生轻蔑地说:“如果你能做成,付你5万美元。”特斯拉发疯似地一连工作了几个月的时间对发电机进行改革试验,把改革后的附件装入发电机后,他完全成功了。当他向爱迪生索取5万美元时,爱迪生却回答说:“特斯拉,你不懂我们美国人的幽默。”
在这之前,特斯拉就意识到交流电广泛的应用前景,但爱迪生对他的想法嗤之以鼻,并至死也不认同交流电,1885年,离开爱迪生,成立自己的公司并开始生产多相交流电机和发电机。1888年,特斯拉成功地建成了一个交流电电力传送系统。他设计的发电机比直流发电机简单、灵便,而他的变压器又解决了长途送电中的固有问题。为了打击特斯拉的交流电,他发行了一本题为《当心》的小册子,书中详细地列举了交流电的所谓种种危险,并把交流电的使用令人难以置信地描述为“枉费心机”。爱迪生还在《北美周刊》发表了一篇题为《电灯之危险》的文章,攻击交流电的使用。他甚至还使用交流电电死狗、猫等动物,以及一头著名的马戏团大象,以让大众对于交流电产生危险的印象,最后甚至参与电椅的研发。
虽然爱迪生极尽所能的打压,但事实证明,交流电才是适合社会所需的供电系统,所以特斯拉并没有被爱迪生的一连串攻击所吓倒。为了改变公众对交流电的印象,他聘请匹茨堡的记者E·H·海因希斯作为他的新闻顾问。在E·H·海因希斯的安排下,特斯拉在1893年,芝加哥博览会的记者招待会上,用电流通过自己的身体,点亮了电灯,甚至还熔化了电线,使在场的记者一个个惊讶得目瞪口呆,取得了极大的宣传效果,由此改变了公众对交流电的看法。
科学史上存在着很多对这样的死敌,他们互相攻击对方的观点,有人取胜有人落败,光的波粒二象性的发现,量子不确定性的确立等等都经过了无数科学家的论战,这也说明了没有争论,就没有科学的发展,时代的进步。
2. 机电系统的建模与仿真
材料中提及的建模方法是将一个系统分成若干个子系统,各个系统互相连接的位置也就是功率传递经过的地方,这些位置称为通口,物理子系统中有几通口就被称为几通口系统,功率变量统一分成两类:一种是势变量e,涉及力、力矩、压强、电压等变量;另一种是流变量f,涉及线速度、角速度、流量、电流等变量。功率可以写成势变量和流变量的乘积。除开功率变量,系统中还存在能量变量,分为广义动量p和广义位移q。这样一个复杂的系统就可以通过这种简约的方式建模,将这四个变量可以构成一个状态四面体,作为时间的函数可以通过积分微分进行转换和功率、能量的计算。
为了表示起来更简单子系统之间相连的通口可以用键或是单线来表示,而多个表示功率键的线将子系统连接在一起组合成为键合图。当主要的子系统以文字形式描述时,此类系统的图称为键合图的描述模型。键合图的描述模型建立了多通口子系统,子系统连接方式,子系统通口的势变量和流变量,以及功率交互中的符号规则。
3. Modelica的学习
改变了一下电压值,并增加了一个elseif语句
model motor1
Real Tm;
Real n;
Real i;
Real u;
parameter Real J = 0.01;
parameter Real R = 0.1;
parameter Real Kt = 1.1;
parameter Real Ke = 0.9;
parameter Real Tl = 2;
equation
if time <= 0.1 then
u = 60;
elseif time <= 0.2 then
u = 120;
else
u=180;
end if;
Tm-Tl = J * der(n);
Tm= Kt * i;
u= i * R + Ke * n;
end motor1;
效果图如下
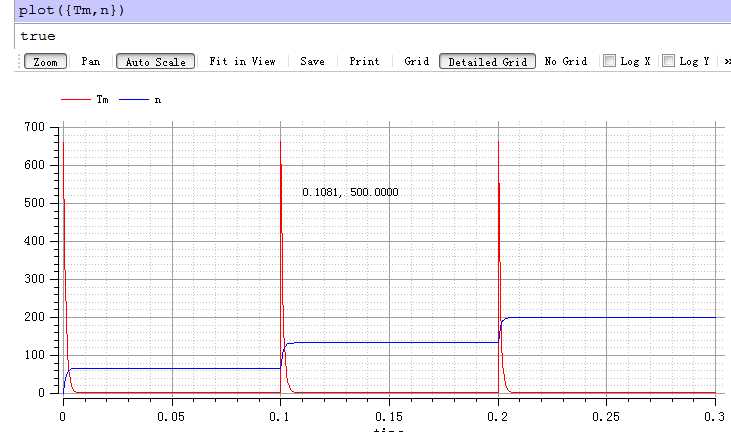
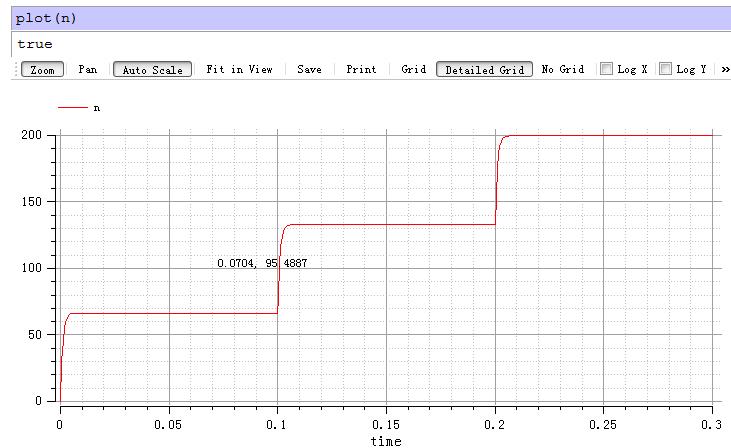
CJP3O{3]1OXWG)VUEW.png)
以上是关于《机电传动控制》第二周作业的主要内容,如果未能解决你的问题,请参考以下文章