[嵌入式开发板]iTOP-4412以模块的方式编译驱动
Posted topeet
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了[嵌入式开发板]iTOP-4412以模块的方式编译驱动相关的知识,希望对你有一定的参考价值。
本文转自迅为:http://www.topeetboard.com
大家好,本章节我们将向大家讲解如何在 linux 下实现以模块的方式加载内核驱动。我们以内核里面蜂鸣器的
驱动为例来讲解。
1)首先打开内核的源码,如下图所示:

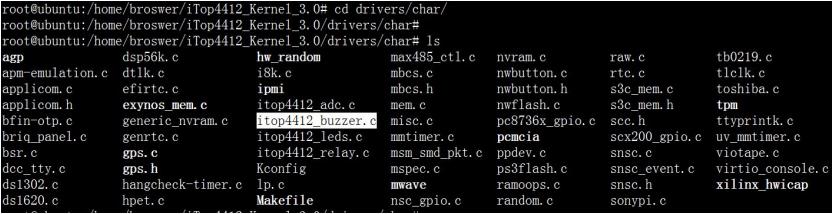
2)使用命令“cd drivers/char/” ,进入到蜂鸣器驱动所在的目录,如下图所示:
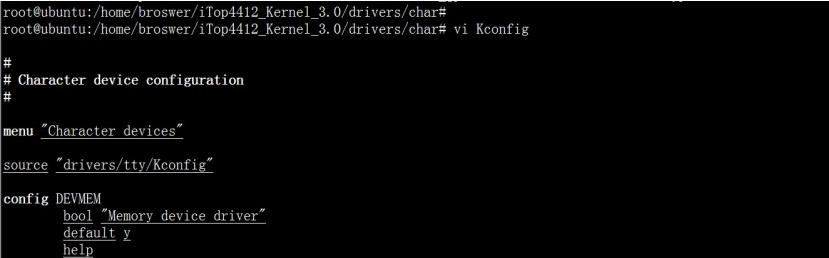
3)然后使用命令“vi Kconfig”打开当前目录下的内核配置文件,如下图所示:
4)然后找到“config BUZZER_CTL”所在的位置,如下图所示:
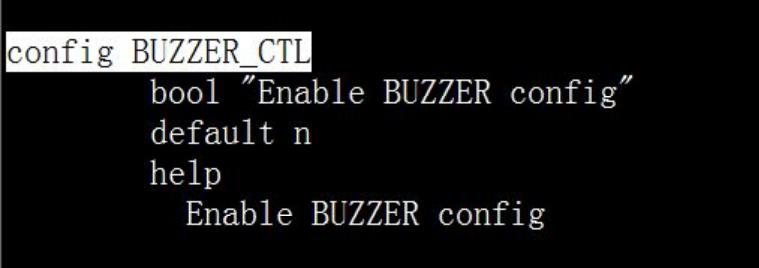
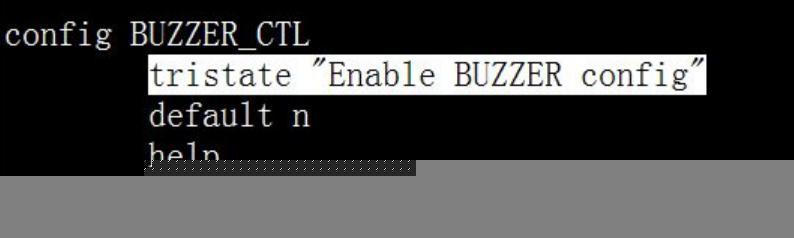
5)然后把“bool "Enable BUZZER config"“一行改成”tristate "Enable BUZZER config"“,如下图所示:
6)然后保存并退出,如下图所示:

7)然后回到内核源码的根目录下,如下图所示:

8)然后输入命令”make menuconfig“配置内核,如下图所示:
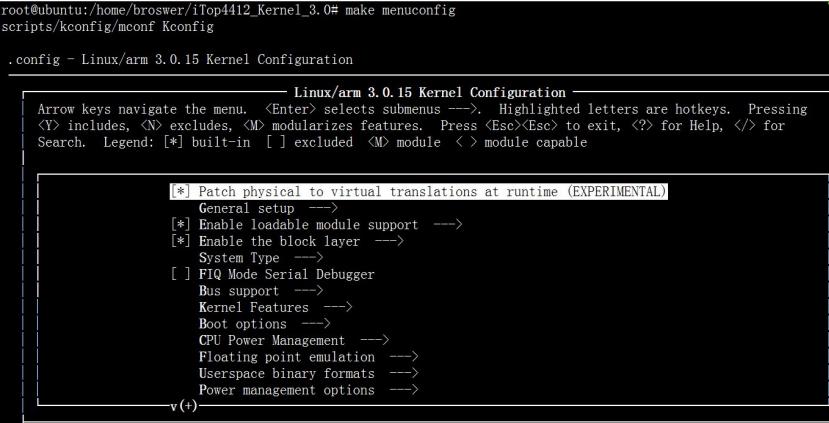
9)选择” Device Drivers “->"Character devices"->"Enable BUZZER config",如下图所示:
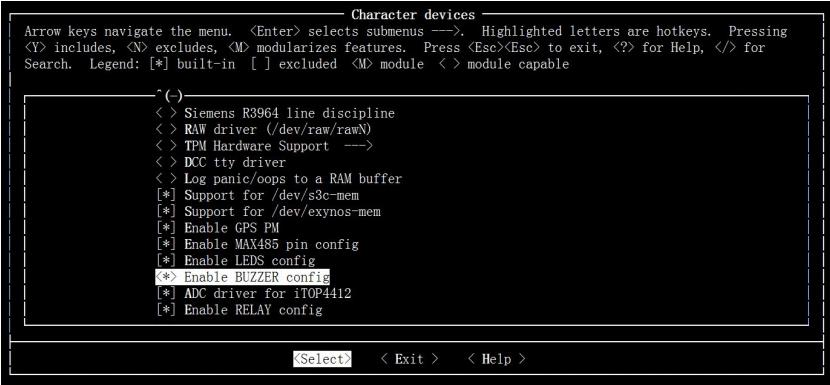
10)然后把” Enable BUZZER config “左边的”*“改成”M“,如下图所示:
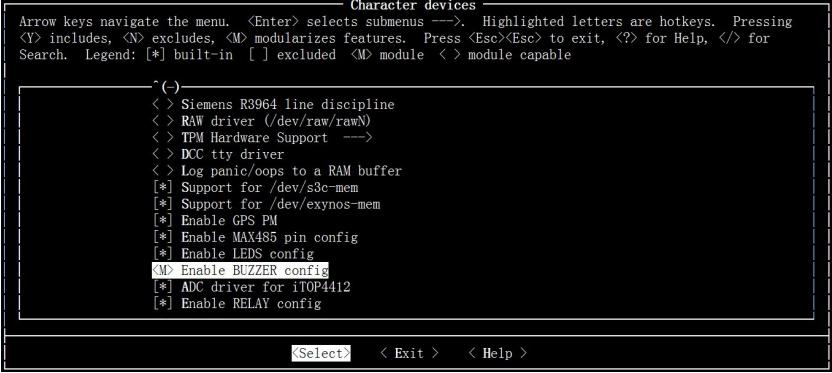
11)然后保存并退出配置界面,如下图:
12)然后使用命令” vi arch/arm/mach-exynos/mach-itop4412.c“打开 mach-itop4412.c,如下图所示:
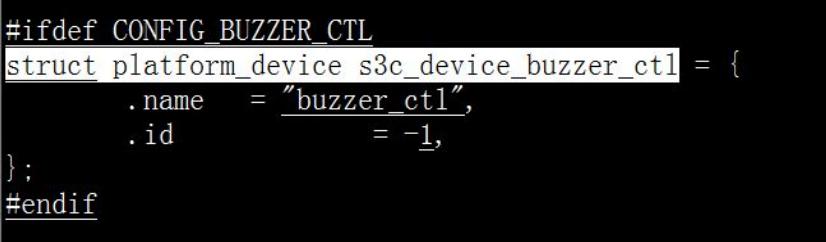
13)然后找到” struct platform_device s3c_device_buzzer_ctl “一行,如下图所示:
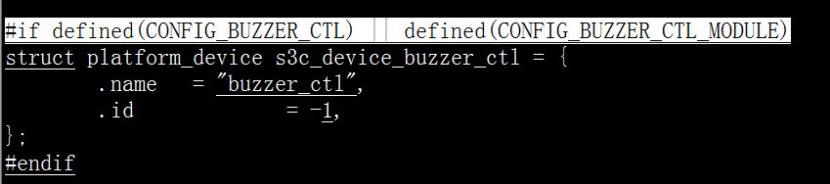
14)把这一行前面的” #ifdef CONFIG_BUZZER_CTL“改成”#if defined(CONFIG_BUZZER_CTL) ||
defined(CONFIG_BUZZER_CTL_MODULE) “,如下图所示:
15)然后找到” &s3c_device_buzzer_ctl“一行,如下图所示:
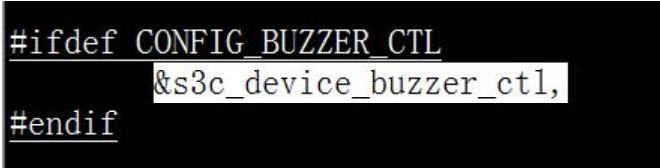
16)把这一行前面的” #ifdef CONFIG_BUZZER_CTL“改成”#if defined(CONFIG_BUZZER_CTL) ||
defined(CONFIG_BUZZER_CTL_MODULE) “,如下图所示:

17)然后保存并退出,返回到 linux 内核源码的根目录下,如下图所示:

18)然后输入命令”make“,开始编译内核,如下图所示:

19)编译完成后会在内核的” arch/arm/boot“目录下生成镜像文件”zImage“,如下图所示:

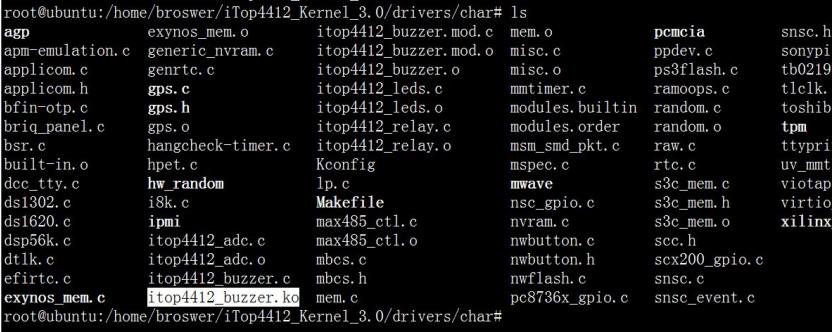
20)在内核的” drivers/char“目录下生成了蜂鸣器的驱动模块” itop4412_buzzer.ko“,如下图所示:
21)下一步我们烧写生成的 zImage 到开发板上,然后开发板启动进入到 android 系统。
22)然后通过 adb 把蜂鸣器的驱动模块传到开发板的"/data"目录下,如下图所示:

23)然后再串口输入命令”cd /data“,进入到开发板的"/data"目录,如下图所示:
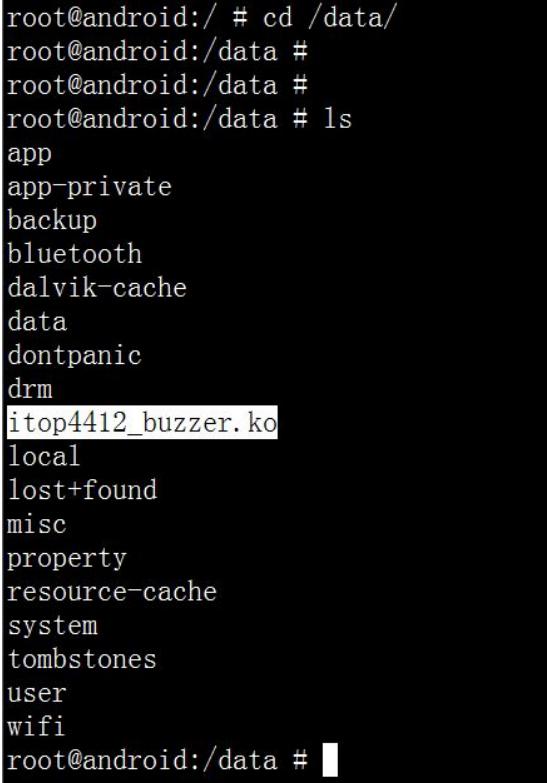
24)然后输入”ls“命令,可以看到通过 adb 传过来的蜂鸣器驱动模块” itop4412_buzzer.ko “,如下图
所示:
25)接着在串口输入命令” insmod itop4412_buzzer.ko “,加载蜂鸣器的驱动,如下图所示:

26)通过上图可以看到蜂鸣器的驱动已经加载到内核里面了,接着输入命令“cd /dev” ,如下图所示:
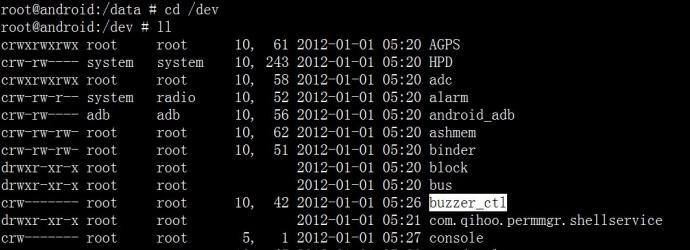
27) 通过上面的图片, 可以看到生成了“ buzzer_ctl” 蜂鸣器的节点了 ,我们需要输入“ chmod 777 buzzer_ctl”
命令来修改下 buzzer_ctl 的权限,如下图所示:
28)然后我们可以使用 android 自带的蜂鸣器小程序来控制蜂鸣器了,至此以模块的方式加载驱动就完成了。
上面我们的驱动是放在了内核源码的目录下来实现的编译成驱动模块,很多时候我们都是拿到一个驱动源码,
不需要把他放到内核源码里面,而是直接把他编译成驱动模块,下面我们来讲下实现方法,我们还是以蜂鸣器
的驱动为例来讲解。
1) 因为开发板带的内核默认是把蜂鸣器直接编译到内核里面了, 所以我们要重复前边的步骤 “1” 到步骤 “19” ,
完成这些步骤以后,把生成的镜像“zImage”烧写到开发板。
2)然后在虚拟机的目录下用命令 mkdir 建立文件夹“module” ,如下图所示:

3)然后用命令 cd 进入到建立的“module”文件夹,如下图所示:
4)拷贝内核里面的蜂鸣器驱动到 module 文件夹,如下图所示:

5)然后在 module 文件夹建立文件“Makefile” ,如下图所示:

6)然后在"Makefile"文件输入下面的信息:
obj-m += itop4412_buzzer.o
KDIR := /home/broswer/iTop4412_Kernel_3.0
PWD = $(shell pwd)
all:
make -C $(KDIR) M=$(PWD) modules
clean:
rm -rf *.o
其中的“KDIR := /home/broswer/iTop4412_Kernel_3.0"是指定我们内核源码所在的目录,我这里内核源码
是放在了” /home/broswer/“目录下面,需要根据自己的存放位置来修改这个地方
7)然后保存并退出 Makefile,在终端输入”make“命令,编译蜂鸣器驱动,如下图所示:
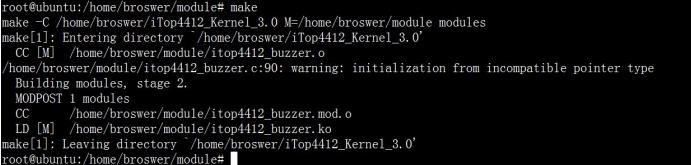
8)编译完成后,可以看下在”module“文件夹下面生成了” itop4412_buzzer.ko“,如下图所示:

9)然后可以参照前面的步骤”22“来测试我们编译的蜂鸣器驱动了。
以上是关于[嵌入式开发板]iTOP-4412以模块的方式编译驱动的主要内容,如果未能解决你的问题,请参考以下文章
嵌入式开发板 iTOP-4412开发板 初学ARM开发板首选!提供技术支持!
嵌入式开发板学习新手在iTOP4412开发板无界面linux操作系统使用CAN模块遇到问题,求解决方法?