第八课 ROS的空间描述和变换
Posted 郭润
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了第八课 ROS的空间描述和变换相关的知识,希望对你有一定的参考价值。
1、tf的实际应用
1)在机器人的配置中
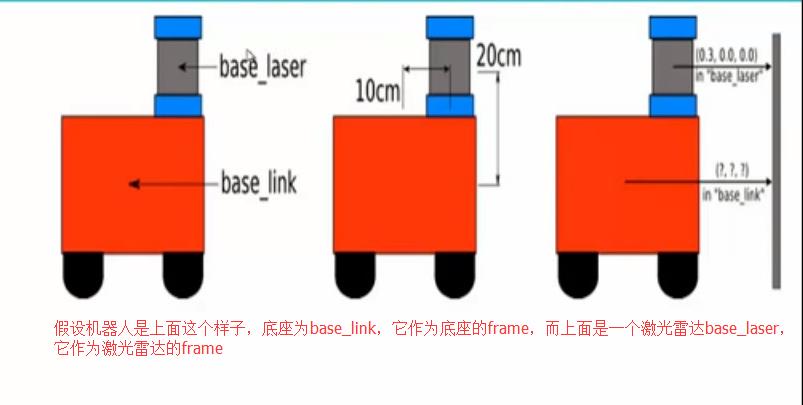
从上面可以看出激光雷达中心距离机器人底座的中心有20cm,激光雷达的中心距机器人底座中心有10cm,如果激光雷达在障碍物前面0.3米,那么机器人底座离障碍物多远呢?
1、新建一个包,如下
catkin_create_pkg robot_setup_tf roscpp tf geometry_msgs
2、catkin_make一下
3、新建两个源文件tf_publisher.cpp,tf_listener.cpp
下面按照base_link和base_laser的位置来编写publisher
#include<ros/ros.h>
#include<tf/transform_broadcaster.h>
int main(int argc,char **argv)
{
ros::init(argc,argv,"tf_publisher");
ros::NodeHandle n;
//发布频率
ros::Rate r(100);
//创建一个transform_broadcaster
tf::TransformBroadcaster broadcaster;
//创建一个transform对象
tf::Transform transform;
//下面设置其位置以及旋转信息
transform.setOrigin(tf::Vector3(0.1,0.0,0.2));
//再创建一个四元组
tf::Quaternion q;
q.setRPY(0.0,0.0,0.0);//没有旋转
transform.setRotation(q);//以上已经把位置描述设定好了
while(ros::ok())
{
broadcaster.sendTransform(tf::StampedTransform(transform,ros::Time::now(),"base_link","base_laser"));//父框架叫base_link,子框架叫base_laser
r.sleep();
}
return 0;
}
下面再tf_listener.cpp当中来编写
在其中使用了一个新的类型叫做geometry_msgs/PointStamped
在命令行当中查看该类型rosmsg show geometry_msgs/PointStamped

#include<ros/ros.h>
#include<geometry_msgs/PointStamped.h>
#include<tf/transform_listener.h>
void transformPoint(const tf::TransformListener &listener)
{
//实例化一个消息
geometry_msgs::PointStamped laser_point;
//指定header的frame_id,表示最新的可用的变换
laser_point.header.framer_id="base_laser";
laser_point.header.stamp = ros::Time();
laser_point.point.x= rand()%5;;//赋予一个随机值
laser_point.point.y= rand()%5;;//赋予一个随机值
laser_point.point.z= rand()%5;;//赋予一个随机值
try
{
geometry_msgs::PointStamped base_point;//实例化一个geometry_msgs::PointStamped类,表示机器人底座
//调用transformlistener的transformpoint函数
listener.transformPoint("base_link",laser_point,base_point);//参数目标框架target_frame,stamped_in以及stamped_out。
//输出相关信息
ROS_INFO("base_laser: (%.2f, %.2f. %.2f) -----> base_link: (%.2f, %.2f, %.2f) at time %.2f",
laser_point.point.x, laser_point.point.y, laser_point.point.z,
base_point.point.x, base_point.point.y, base_point.point.z, base_point.header.stamp.toSec());
}
catch(tf::TransformException& ex){
ROS_ERROR("Received an exception trying to transform a point from \\"base_laser\\" to \\"base_link\\": %s", ex.what());
}
}
int main(int argc,char **argv)
{
ros::init(argc,argv,"tf_listener");
ros::NodeHandle n;
//定义一个transformlistener对象
tf::TransformListener listener(ros::Duration(10))//等待10s,如果10s之后都还没收到消息,那么之前的消息就被丢弃掉。
//创建一个timer对象,绑定了一个transformpoint的地址,后面是该函数transformpoint的参数
ros::Timer timer=n.createrTimer(ros::Duration(1.0),boost::bind(&transformPoint,boost::ref(listener)));
//在上面去实现transformPoint这个函数
ros::spin();
}
对上面代码总结一下:
在main函数实例化一个listener对象,然后创建一个定时器1s钟调用上面函数一次,......。
下面把CMakeLists.txt修改一下
add_executable(tf_listener src/tf_listener.cpp);
add_executable(tf_publisher src/tf_publisher.cpp);
target_link_libraries(tf_listener ${catkin_LIBRARIES})
target_link_libraries(tf_publisher ${catkin_LIBRARIES})
再写一个launch文件:
<launch>
//再添加一个frame称为camera把它固定在base_link上,用static_transform_publisher来指定base_link(父框架)和camera(子框架)的关系,
//位置信息0.1 0.0 0.2,方向信息为0 0 0 1
<node pkg="tf" type="static_transform_publisher" name="broadcaster" args="0.1 0.0 0.2 0 0 0 1 base_link camera 100">
//我们要启动的node
<node pkg="robot_setup_tf" type="tf_publisher" name="publisher"/>
<node pkg="robot_setup_tf" type="tf_listener" name="listener"/>
</launch>
下面去编译
catkin_make
运行之
roscore
rosrun robot_setup_tf tf_listener
rosrun robot_setup_tf tf_publisher
然后进入rviz中去观察。
然后再看看launch文件
roslaunch robot_setup_tf demo.launch,在launch文件中我们又指定了一个坐标系框架叫做camera
下面去看一下
rosrun tf view_frames,生成一个PDF文件,可以看到

以上是关于第八课 ROS的空间描述和变换的主要内容,如果未能解决你的问题,请参考以下文章