生活娱乐 WIFI机器人(某机器发烧友自己动手做一台)
Posted gary_tao的个人博客
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了生活娱乐 WIFI机器人(某机器发烧友自己动手做一台)相关的知识,希望对你有一定的参考价值。
某机器发烧友自己动手做一台WIFI机器人,以下是这位发烧友的自述!让我们一起来分享他的劳动成果……

在经历了十多天的疯狂淘宝、组装、调试、拆卸、再组装、再调试的过程后,俺的Wifi Robot终于于2011年3月1日23:30竣工!!泪流满面!下面简单写写制作过程,也好给自己留个存档。
俺用的方案是igee论坛的wifi小车方案,驱动板与控制程序都是现成滴……不过现在发现吃现成的虽然方便,但是扩展功能却少得可怜。下一步打算买块arduino板自己研究一下重新组装小车,自己写写程序什么的。
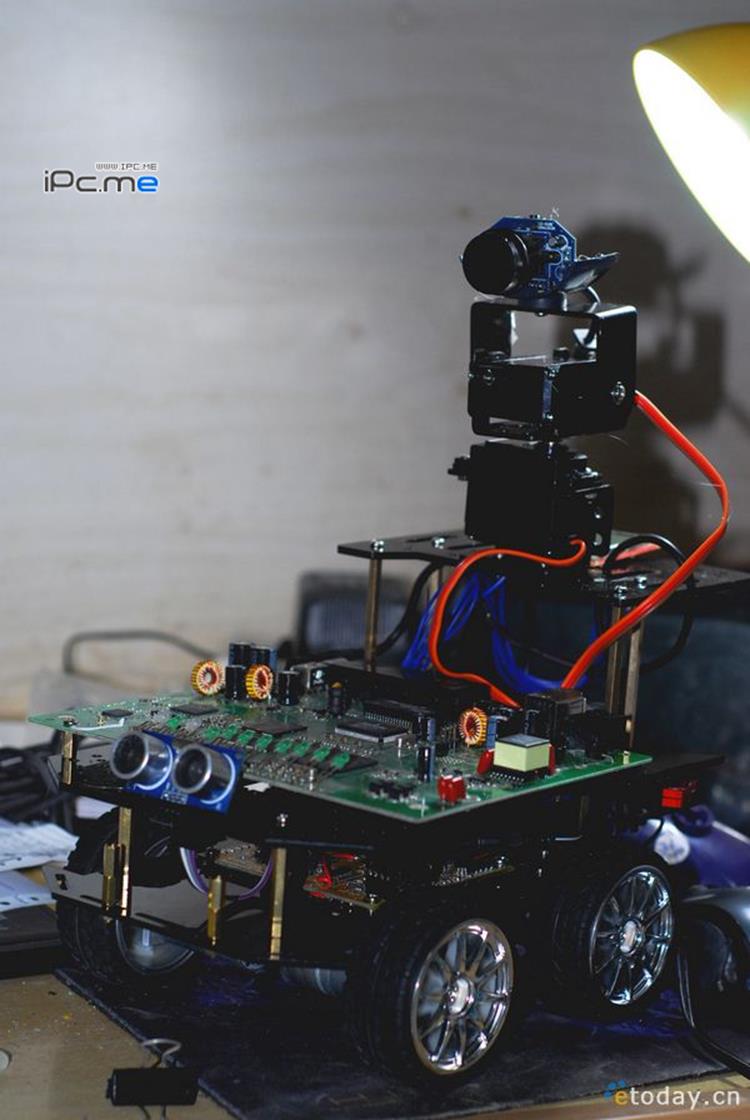
Wifi Robot,顾名思义就是通过wifi无线网控制的机器人,比起普通的遥控车遥控机器人来,它的好处就是遥控信号覆盖范围可以做到很广,也可以通过互联网远程遥控,这样的话就可以派生出很多新的应用,比如视频监控等等。因为是新手初学,机器人的外形和功能上还比较粗糙,高手看到了不要笑话~
1.准备工作
罗列一下零件清单:
亚克力车架×1:65元
igee小车驱动板带5110屏×1:150元
超声波传感器×1:40元
大亚DB120-B1无线路由×1:45元
301芯片摄像头×5:第一次买的一个10块,让我把线扯断了焊不上了,废弃。第二次买的一个10块,又坏了……第三次买了仨,每个5块。至今正常。合计35。
广角镜头×1:5.3元
辉盛M995舵机×2:70元
舵机云台支架×1:32元
步进马达套件×4:144元
12V4800mAh锂电池:87元
杜邦线螺丝螺帽等等配件若干……
合计:673.3元
由于是第一次进行机器人制作,工具基本没有,光买电烙铁热熔胶枪电钻万用表就花了不少钱。加上乱七八糟的花销,总共1200+。一个多月的生活费没了……
2.大家欣赏一下我的工作环境
寝室条件比较简陋……电脑画面为机器人控制界面

机器人控制界面
在买到亚克力车架和电钻之前我的小车一直使用个纸盒做车架的。纸盒虽然加工方便,但是太软,小车经常跑偏。而且由于轮距不合适,加装舵机云台之后由于载重增加导致转弯阻力太大,小车基本转不动了。
 拆之前忘了照相,只好拆完拼凑一下。依稀还可以看出原来小车的影子。
拆之前忘了照相,只好拆完拼凑一下。依稀还可以看出原来小车的影子。
亚克力板很便宜,易于加工,完全可以不买成品板自己加工出来。但是缺点是不如铝板结实和拉风,上螺丝时容易出现裂纹。如果选用铝做车架的话,可以考虑用铝盒或角铝,经过简单加工也是非常好的车架。
3.正式开工!
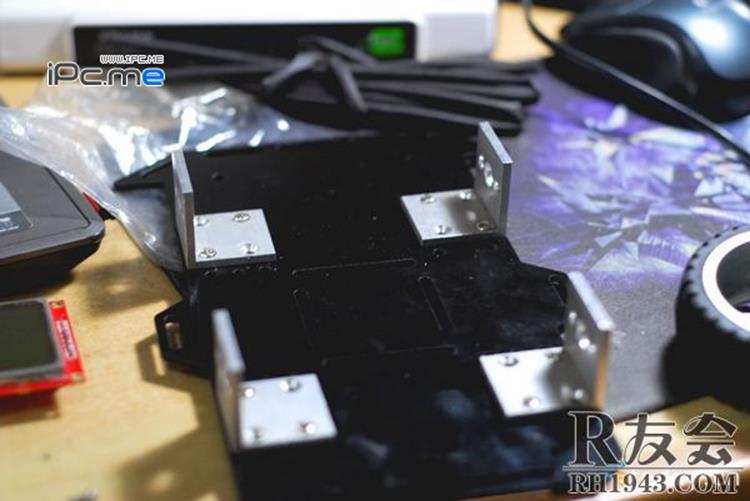
首先在底盘上安装马达支架。在合适的地方打孔并安装马达支架。注意孔径不要太小,不然强行上螺丝会导致亚克力开裂。另外打孔时先用锥子之类的定位就不会打偏了。
如果是自制车架的话,要考虑好轮距。我做的是四驱小车,左右转弯要靠两侧的车轮反转实现,轮距太宽容易造成转弯阻力太大。
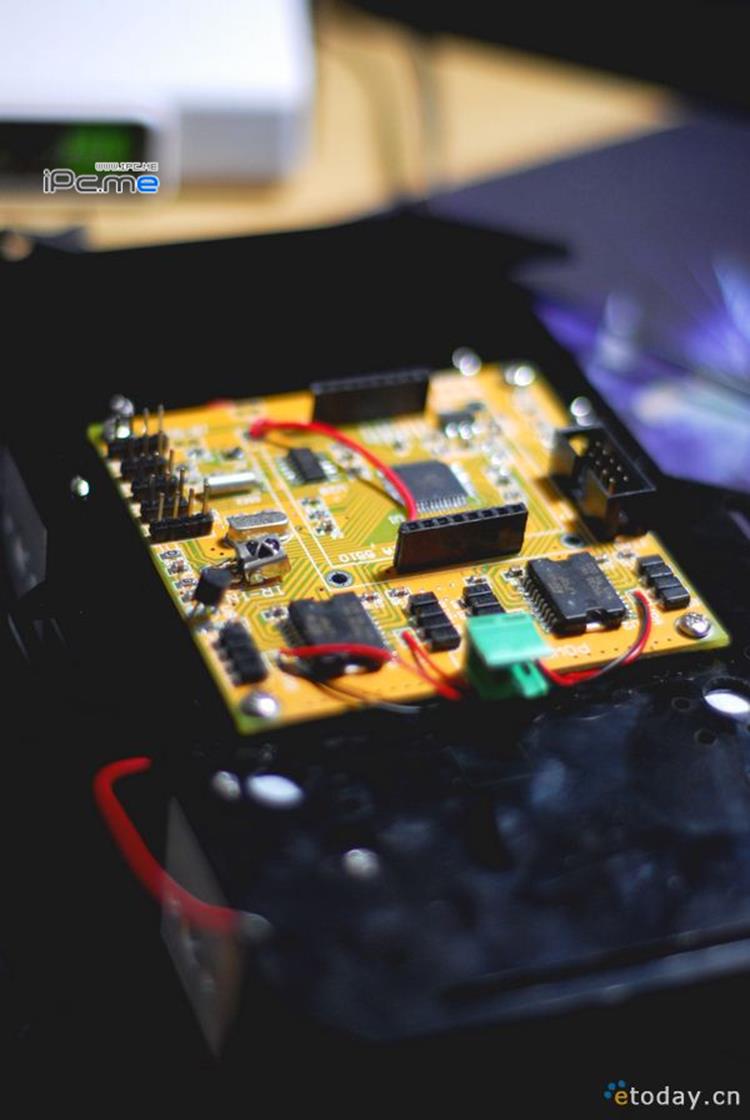
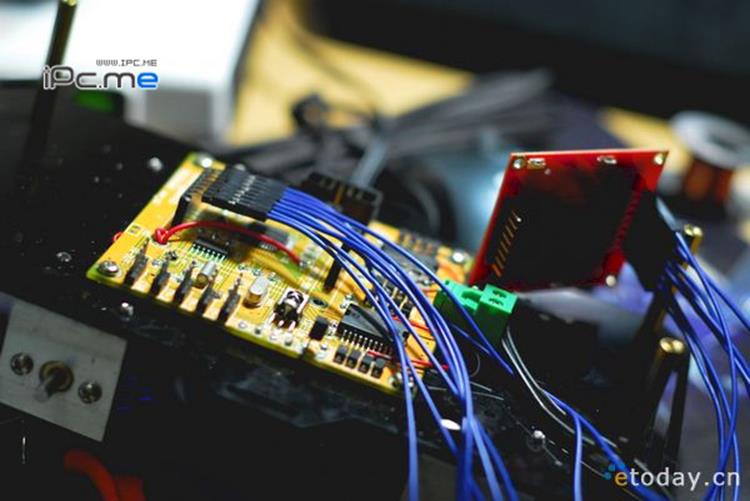
正面固定好驱动板。可以考虑用铜柱把板子架高,方便线通过。
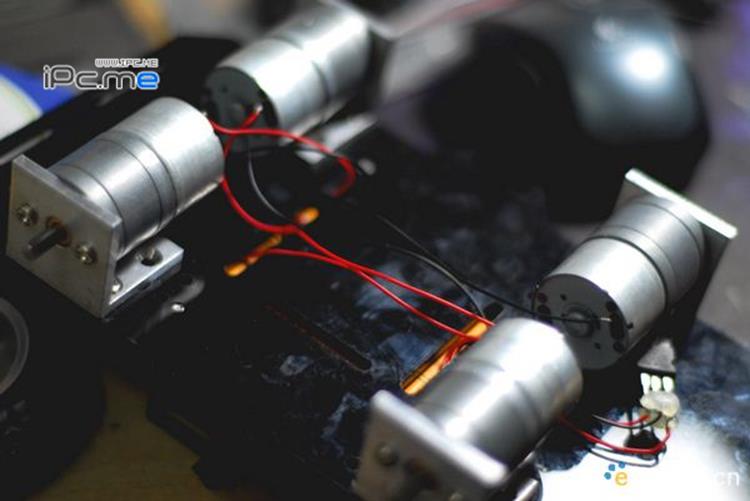
安装马达
安装步进马达并焊好控制线。焊之前先给线头沾点松香上锡,焊起来会比较方便。另外这片驱动板的舵机供电部分采用的是一片L7805,工作时发热较大,我用螺丝固定在了铝制马达支架上帮助散热,用金属车身的话效果当然更好了。
5110屏原来是固定在板子上的。为了方便查看所以拿杜邦线引出。
 绑线
绑线
在第二层车板背面固定电池。本来想做个便于取出的抽屉,奈何没找到合适材料材料,最后用了胶带和橡皮筋固定,并在车体侧面安装了船型开关控制驱动板的电源。
 电池
电池

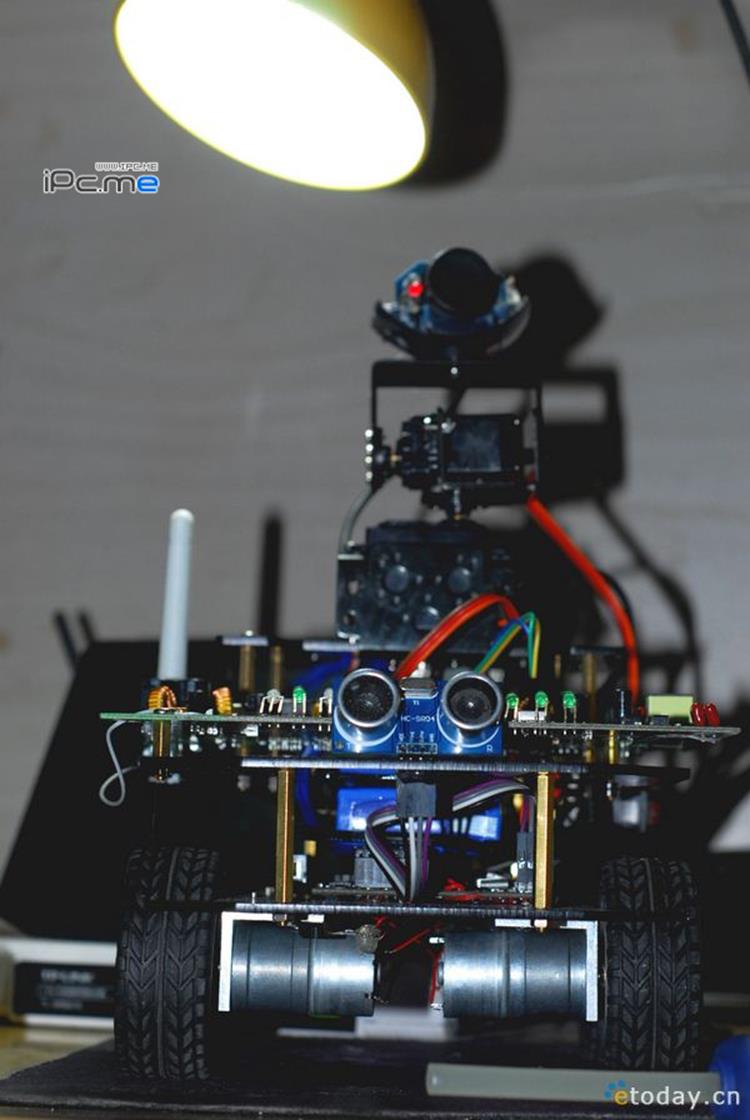
安装超声婆传感器
车头安装超声波传感器。拿热熔胶固定的,效果不太好,打算改一下。注意最好不要伸出车体,免得小车撞墙时损坏。

我用的摄像头外壳太丑,所以直接把电路板裸着了,这样就必须用热熔胶好好固定住USB线,避免摄像头转向时线被扯断。
把5110屏固定在车架上,方便查看运行信息。目前的程序可以实现查看温度和前方障碍物距离的功能。
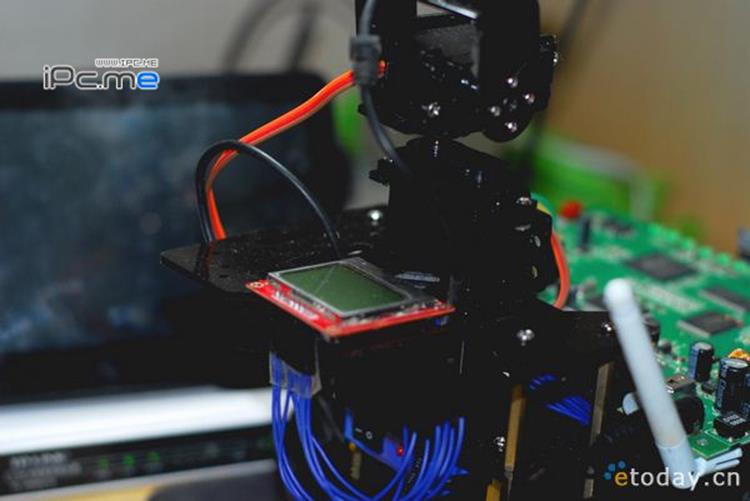
将摄像头插在路由器的USB口上,舵机控制线插到驱动板上,路由与驱动板之间接好TTL线。小车已初具雏形。
固定路由天线。DB120自带的天线太袖珍,估计信号也好不了哪去。下一步打算买个雷达型的定向天线装上,更拉风,哈哈。不过好像小车这样的遥控装置并不适合装定向天线,所以目前只能YY一下了。
4.完工!!
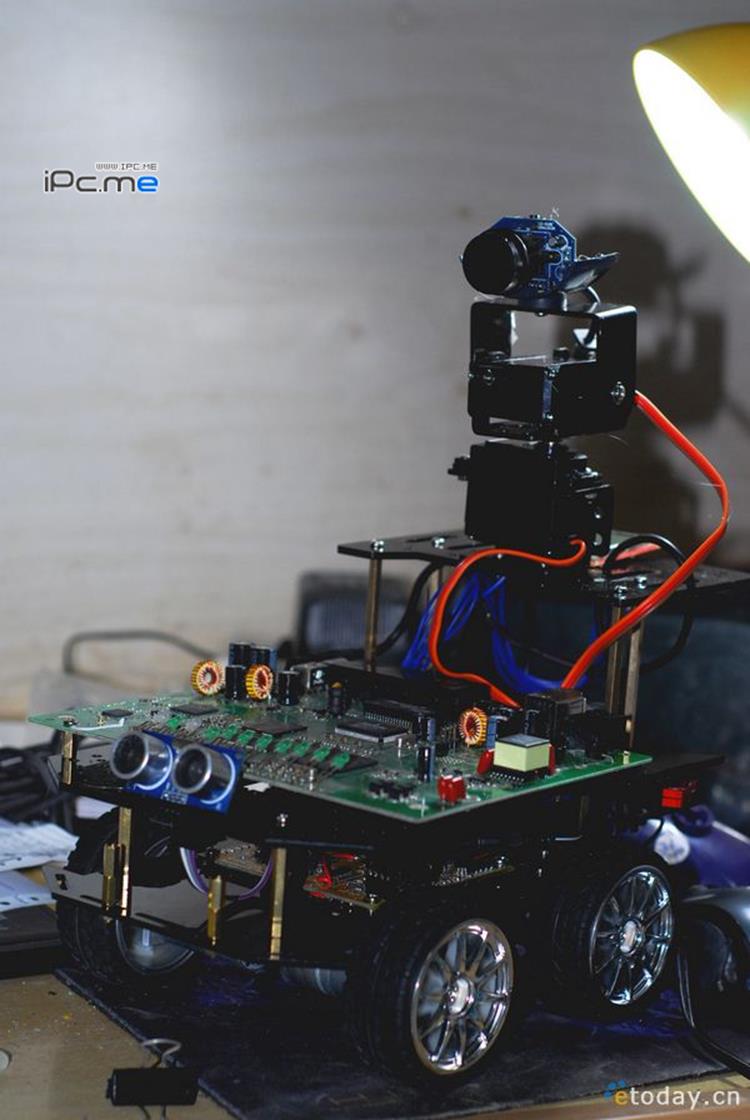
client模式接入一级路由
接下来把路由器刷成openwrt并装好wifirobot程序,设成client模式接入一级路由就可以控制了。

这是小车的控制界面~
因为不用进行编程和电路设计的工作,所以这个小车做起来还是比较快的,前后大概用了一个多星期,包括等快递的时间。
PS:其实目前这个小车的主要作用也就是逗猫玩,不过凭自己的力量亲手打造一个看起来很酷的wifi robot,这种瞎(学名DIY)的乐趣才是真正酷的东西,不是吗?
以上是关于生活娱乐 WIFI机器人(某机器发烧友自己动手做一台)的主要内容,如果未能解决你的问题,请参考以下文章