单目视觉里程计 mono vo
Posted 白巧克力亦唯心
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了单目视觉里程计 mono vo相关的知识,希望对你有一定的参考价值。
之前为了提升svo的鲁棒性,进行了一些不同的尝试,虽然稳定性有所提升,两个视频demo在下面,但依然不尽人意。
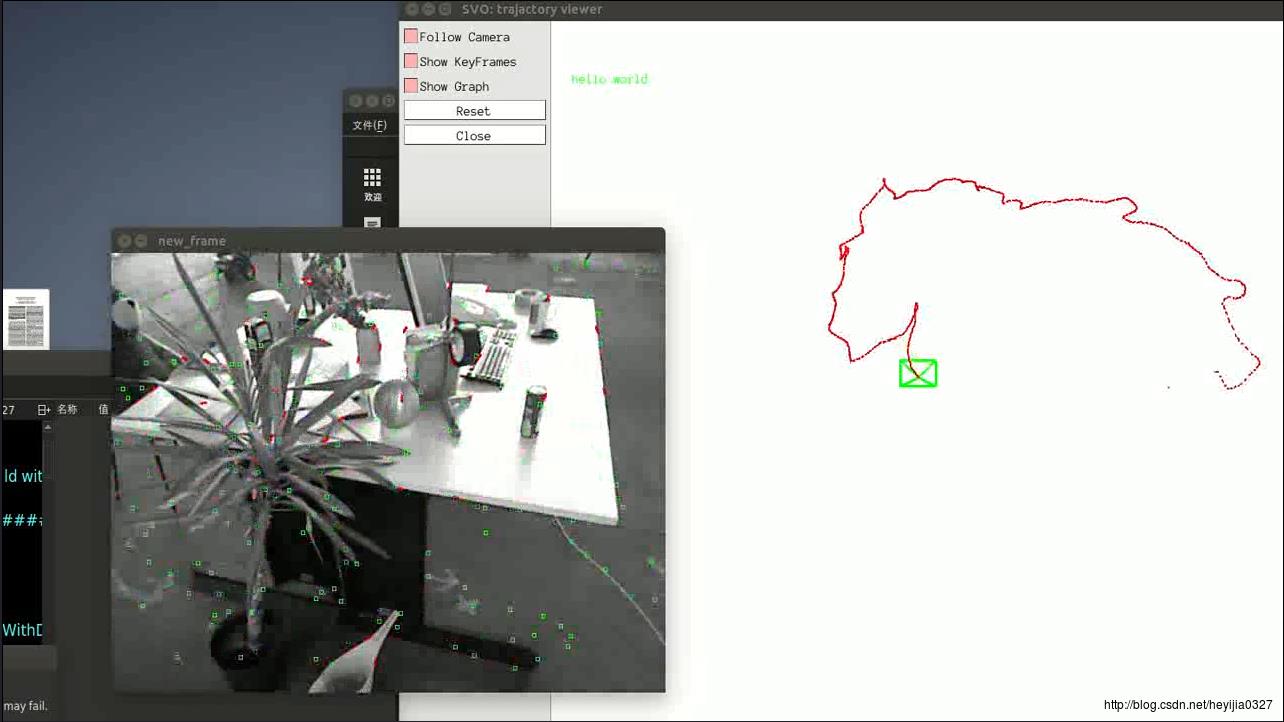
效果1 (svo基础上添加了edgelet feature)
代码已放在github上,欢迎修改,共同学习改进。
视频链接: https://v.qq.com/x/page/d0383rpx3ap.html
在不同数据集上测试
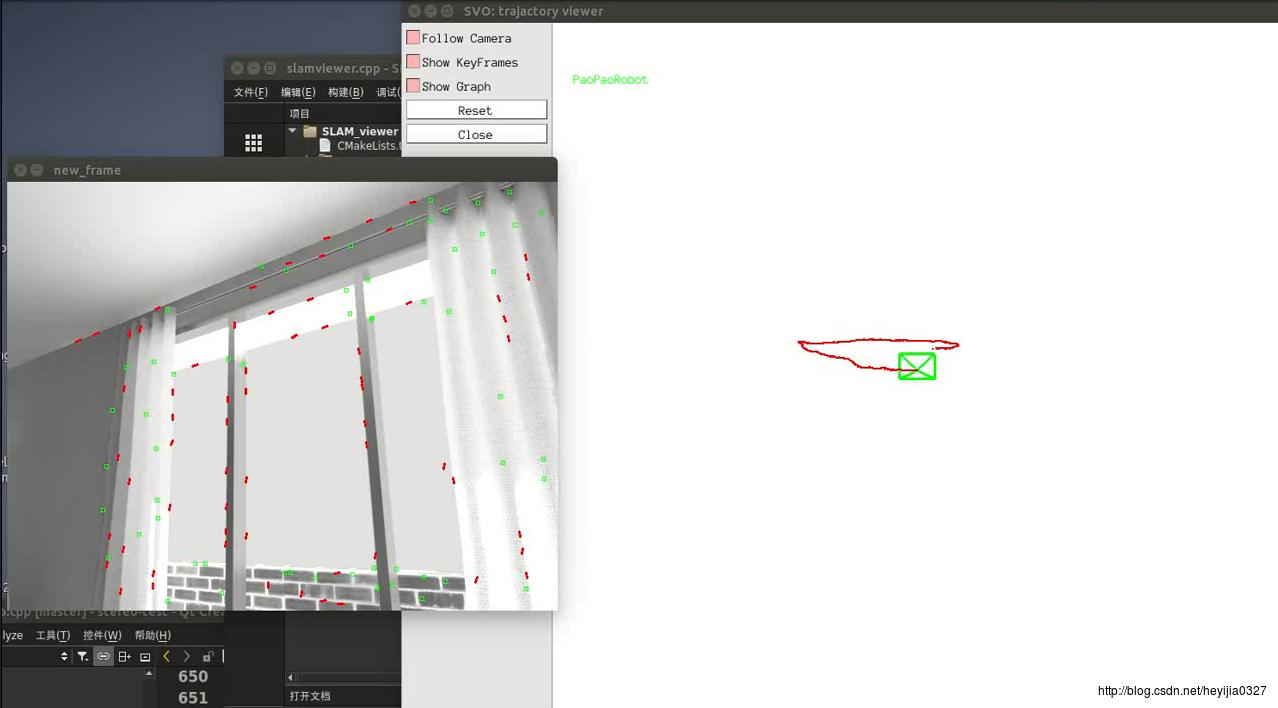
效果2 (半稠密)
视频链接: https://v.qq.com/x/page/k03832nd7pu.html
vo2对着天花板,用于室内机器人
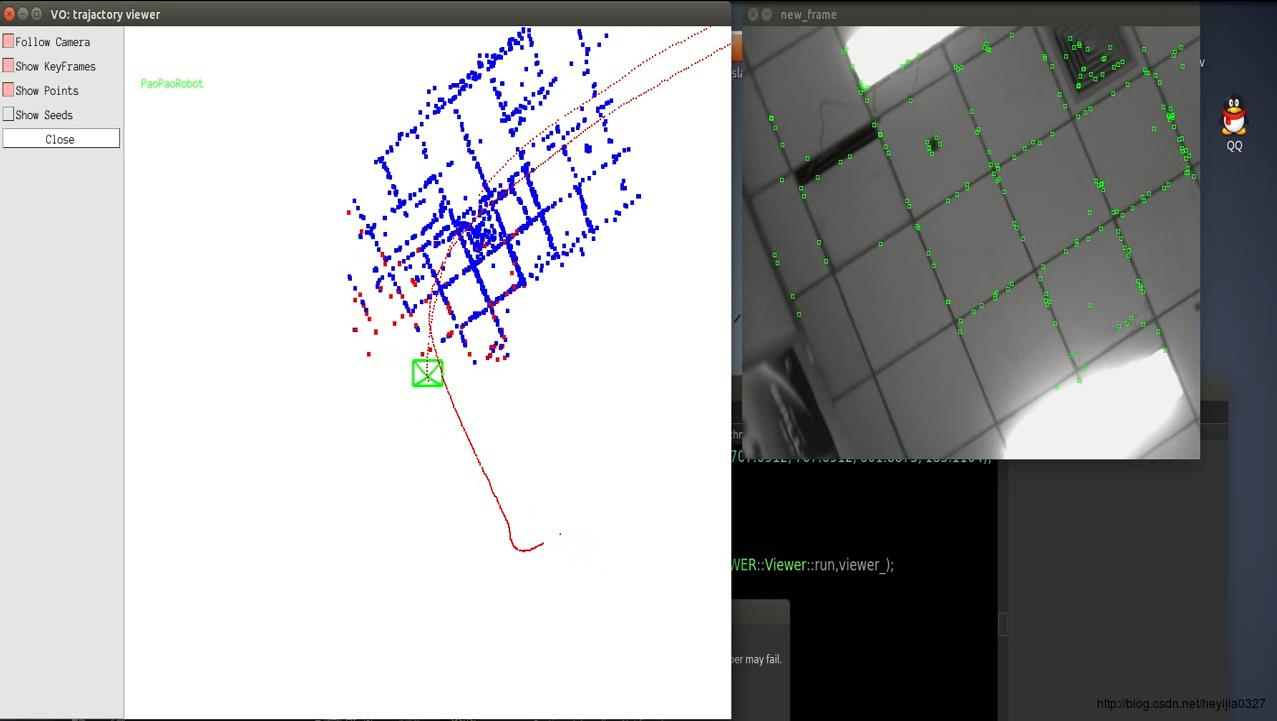
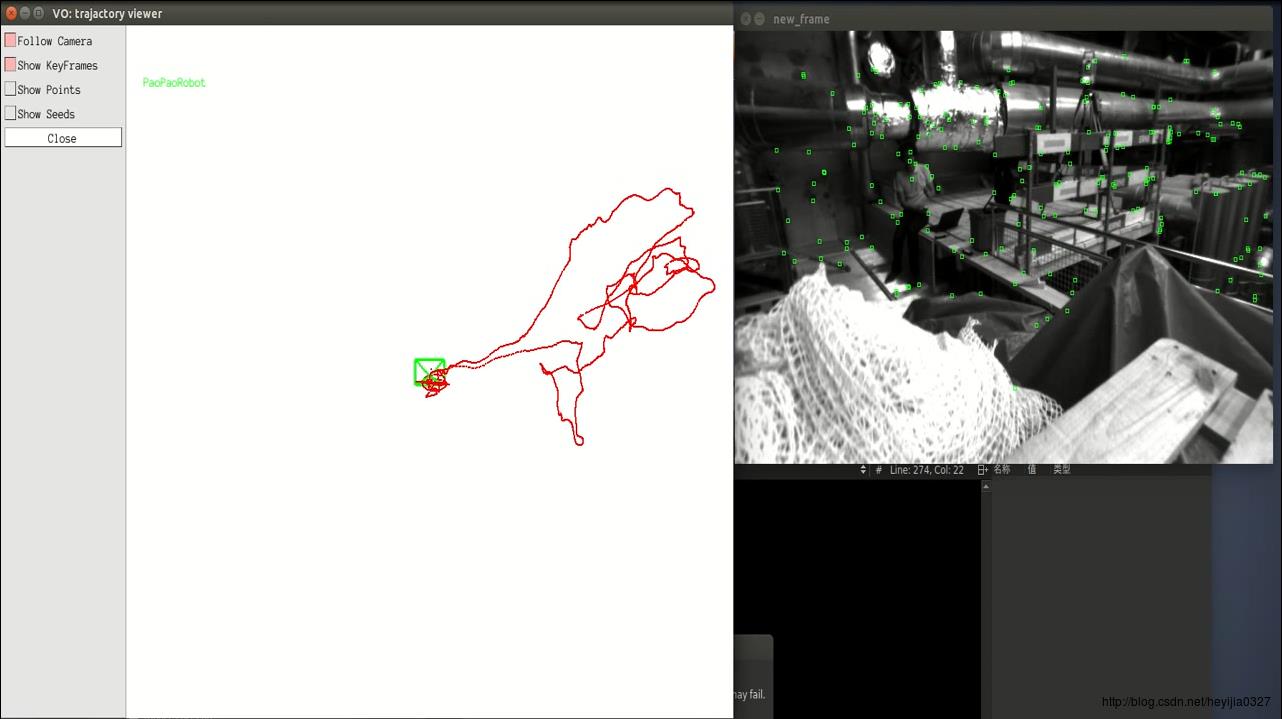
vo2在euroc数据集上,无人机从起点飞出到飞回原点,可看到轨迹中起始点闭合的比较好,漂移小。
以上是关于单目视觉里程计 mono vo的主要内容,如果未能解决你的问题,请参考以下文章