gearman中任务的优先级和返回状态
Posted 两脚任从行处来,一灵常与气相随。有时四大熏熏醉,借问青天我是
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了gearman中任务的优先级和返回状态相关的知识,希望对你有一定的参考价值。
gearman中任务的优先级和返回状态
一、任务的优先级
同步阻塞调用,等待返回结果
doLow:最低优先 doNomal:正常优先级 doHigh:最优先执行
异步派发任务,不等待返回结果,返回任务句柄,通过该句柄可获取任务运行状态信息
doLowBackground doBackground doHighBackground
注意Task和doXXX区别,Task是一组job,派发后会分配到多个worker上并行执行并返回结果给调用方。
而doXXX的每个任务只会在一个worker上执行。
addTaskLow addTask addTaskHigh addTaskLowBackground addTaskBackground addTaskHighBackground
cli.php代码如下:
<?php
$client = new GearmanClient();
$client->addServer(\'127.0.0.1\', 4730);
$client->setCompleteCallback(function($task) {
echo $task->data(), PHP_EOL;
});
//分别添加不同优先级的Task
$client->addTaskLow(\'sum\', json_encode(array(100, 100)));
$client->addTask(\'sum\', json_encode(array(200, 200)));
$client->addTaskHigh(\'sum\', json_encode(array(300, 300)));
$client->runTasks();
worker.php代码如下:
<?php
$worker = new GearmanWorker();
$worker->addServer(\'127.0.0.1\', 4730);
$worker->addFunction(\'sum\', function($job) {
$data = json_decode($job->workload(), true);
$ret = $data[0] + $data[1];
echo $ret, PHP_EOL;
sleep(1);
return $ret;
});
while($worker->work());
注意,为了实验效果,这里worker只需启动一个。
二、获取任务的状态
cli.php代码如下:
<?php
$client = new GearmanClient();
$client->addServer(\'127.0.0.1\', 4730);
//任务排队时的回调
$client->setCreatedCallback(\'reverse_create\');
//有任务数据包时的回调
$client->setDataCallback(\'reverse_data\');
//收集任务状态的回调
$client->setStatusCallback(\'reverse_status\');
//任务完成时的回调
$client->setCompleteCallback(\'reverse_complete\');
//任务失败时的回调
$client->setFailCallback(\'reverse_fail\');
//分别添加不同优先级的Task
$client->addTaskLow(\'reverse\', \'1234567\');
$client->addTask(\'reverse\', \'hello\');
$client->addTaskHigh(\'reverse\', \'world\');
$client->runTasks();
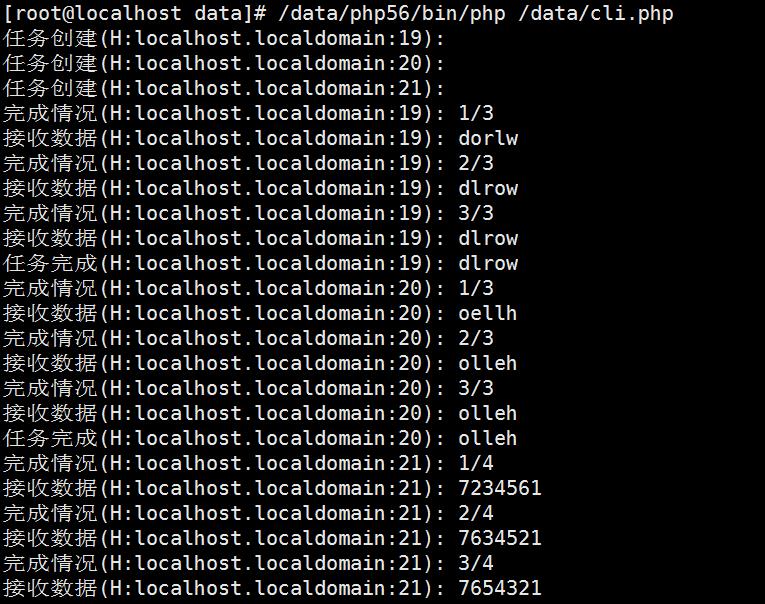
function reverse_create($task) {
echo \'任务创建(\', $task->jobHandle() , \'): \', PHP_EOL;
}
function reverse_data($task) {
echo \'接收数据(\', $task->jobHandle() , \'): \', $task->data(), PHP_EOL;
}
function reverse_status($task) {
//taskNumerator()获取任务完成情况的分子
//taskDenominator()获取任务完成情况的分母
echo \'完成情况(\', $task->jobHandle() , \'): \', $task->taskNumerator(), \'/\', $task->taskDenominator(), PHP_EOL;
}
function reverse_complete($task) {
echo \'任务完成(\', $task->jobHandle() , \'): \', $task->data(), PHP_EOL;
}
function reverse_fail($task) {
echo \'任务失败(\', $task->jobHandle() , \'): \', PHP_EOL;
}
worker.php代码如下:
<?php
$worker = new GearmanWorker();
$worker->addServer(\'127.0.0.1\', 4730);
$worker->addFunction(\'reverse\', function($job) {
//workload()返回接收的数据
$data = $job->workload();
//workloadSize()返回接收数据的字节大小
$dataSize = $job->workloadSize();
echo "worker: {$data} ({$dataSize}) \\n";
$tmp = 0;
$mid = $dataSize / 2;
for($ix = 0; $ix < $mid; ++$ix) {
$tmp = $data[$ix];
$data[$ix] = $data[$dataSize - $ix - 1];
$data[$dataSize - $ix - 1] = $tmp;
//这里发送状态,会被client设置的回调reverse_status()接收到
//状态完成情况的分子与分母
$job->sendStatus($ix + 1, $mid + 1);
//发送数据,被reverse_data()接收到
$job->sendData($data);
sleep(1);
}
return $data;
});
while($worker->work());
运行结果如下:

以上是关于gearman中任务的优先级和返回状态的主要内容,如果未能解决你的问题,请参考以下文章