ForeignResearch Rover [DP]
Posted BearChild
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ForeignResearch Rover [DP]相关的知识,希望对你有一定的参考价值。
Research Rover
Time Limit: 25 Sec Memory Limit: 256 MBDescription
Input

Output
仅一行一个整数表示答案。
Sample Input
3 3 2 11
2 1
2 3
Sample Output
333333342

HINT

Main idea
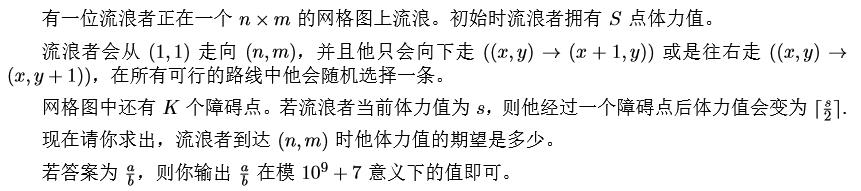
从(1,1)走到(n,m),每次可以向右或向下走一步,有K个特殊点,初始有一个权S,每经过一个特殊点S=(S+1)/2,询问到(n,m)的S的期望。
Solution
我们显然想到了DP,研究一下题目,发现可以按照到达目标之后S的值分类,显然S的取值只和经过特殊点的个数相关。并且由于每经过一个特殊点,S的值就会/2,那么显然只有log2(S)种取值,所以我们可以去考虑一个O(K^2log(S))的做法。
首先,从起点走到终点的总方案数是: ,我们可以将终点也当做特殊点,那么就可以令 f[i][j] 表示到了第 i 个目标点,经过 j 个目标点的方案数。
,我们可以将终点也当做特殊点,那么就可以令 f[i][j] 表示到了第 i 个目标点,经过 j 个目标点的方案数。
那么我们可以考虑容斥: 。
。
那么写成表达式也就是:

其中: ,计算方法显然和计算总方案一样,运用组合数。(组合数计算的时候求一下乘法逆元和阶乘逆元即可)
,计算方法显然和计算总方案一样,运用组合数。(组合数计算的时候求一下乘法逆元和阶乘逆元即可)
这样的话就可以算出到终点经过 i 个特殊点的方案、乘上对应的S的值、然后计算一下、再乘上总方案的乘法逆元就是答案了。
效率就是O(k^2 * log(S)),就可以解决这道题啦。\\(≧▽≦)/
Code


1 #include<iostream>
2 #include<algorithm>
3 #include<cstdio>
4 #include<cstring>
5 #include<cstdlib>
6 #include<cmath>
7 using namespace std;
8 typedef long long s64;
9 const int ONE = 200005;
10 const int INF = 214783640;
11 const int MOD = 1e9+7;
12
13 int Mod = MOD;
14 int n,m,K,S;
15 int f[ONE][30];
16 int Jc[ONE],inv[ONE];
17 int A[30],a_num;
18 int Up;
19
20 struct power
21 {
22 int x,y;
23 }a[ONE];
24
25 int cmp(const power &a,const power &b)
26 {
27 return a.x+a.y < b.x+b.y;
28 }
29
30 int get()
31 {
32 int res,Q=1; char c;
33 while( (c=getchar())<48 || c>57)
34 if(c==\'-\')Q=-1;
35 if(Q) res=c-48;
36 while((c=getchar())>=48 && c<=57)
37 res=res*10+c-48;
38 return res*Q;
39 }
40
41 namespace D
42 {
43 int Quickpow(int a,int b)
44 {
45 int res=1;
46 while(b)
47 {
48 if(b&1) res=(s64)res*a%MOD;
49 a=(s64)a*a%MOD;
50 b>>=1;
51 }
52 return res;
53 }
54
55 void Deal_Jc(int k)
56 {
57 Jc[0]=1;
58 for(int i=1;i<=k;i++) Jc[i] = (s64)Jc[i-1]*i%MOD;
59 }
60
61 void Deal_inv(int k)
62 {
63 inv[0]=1; inv[k] = Quickpow(Jc[k],MOD-2);
64 for(int i=k-1;i>=1;i--) inv[i] = (s64)inv[i+1]*(i+1)%MOD;
65 }
66
67 void pre(int k)
68 {
69 Deal_Jc(k); Deal_inv(k);
70 }
71 }
72 int C(int n,int m)
73 {
74 return (s64)Jc[n]*inv[m]%MOD*inv[n-m]%MOD;
75 }
76
77 int ways(int i,int j)
78 {
79 return C(a[j].x+a[j].y-a[i].x-a[i].y, a[j].x-a[i].x);
80 }
81
82 void Moit(int &a)
83 {
84 if(a<0) a+=MOD;
85 if(a>MOD) a-=MOD;
86 }
87
88 int main()
89 {
90 n=get(); m=get(); K=get(); S=get();
91
92 A[0]=S; for(a_num=1;a_num<=24;a_num++) S=(S+1)/2, A[a_num]=S;
93 D::pre(n+m);
94
95 for(int i=1;i<=K;i++)
96 {
97 a[i].x=get(); a[i].y=get();
98 }
99 a[++K].x = n; a[K].y = m;
100 sort(a+1,a+K+1,cmp);
101
102 for(int i=1;i<=K;i++)
103 {
104 for(int j=0;j<a_num;j++)
105 {
106 f[i][j] = C(a[i].x+a[i].y-2,a[i].x-1);
107 for(int k=1;k<=i-1;k++)
108 {
109 if(a[k].x <= a[i].x && a[k].y <= a[i].y)
110 f[i][j] -= (s64)f[k][j] * ways(k,i) % MOD,
111 Moit(f[i][j]);
112 }
113
114 for(int k=0;k<=j-1;k++)
115 f[i][j] -= f[i][k], Moit(f[i][j]);
116 }
117 }
118
119 int All = C(n+m-2,n-1);
120
121 for(int i=0;i<a_num;i++)
122 {
123 Up = (Up + (s64)f[K][i]*A[i]) % MOD;
124 All -= f[K][i]; Moit(All);
125 }
126
127 Up = Up + All; Moit(Up);
128
129 printf("%d",(s64)Up * D::Quickpow(C(n+m-2,n-1),MOD-2) % MOD);
130 }
以上是关于ForeignResearch Rover [DP]的主要内容,如果未能解决你的问题,请参考以下文章
如何使用 Apollo Rover + Codegen 生成打字稿模式类型
Land Rover Aurora 2014 airbag repair using CG100 Pro III
编程案例 | 路虎Range Rover Sport驾驶员车门模块在线编程
2009 Land Rover Discovery 3 ABS Steering Angle Sensor Calibration Learning with launch X431 Diagnost