[Hardware]三维点云数据获取
Posted 岁寒然后知松柏之后凋也!
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了[Hardware]三维点云数据获取相关的知识,希望对你有一定的参考价值。
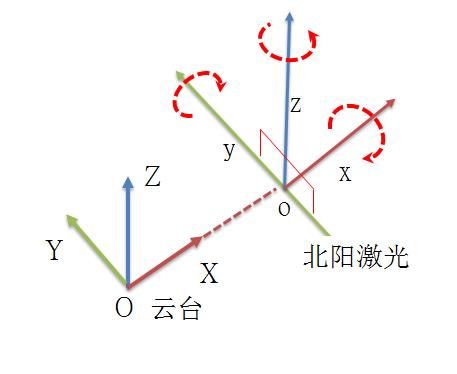
A laser mount on a tilting unit.
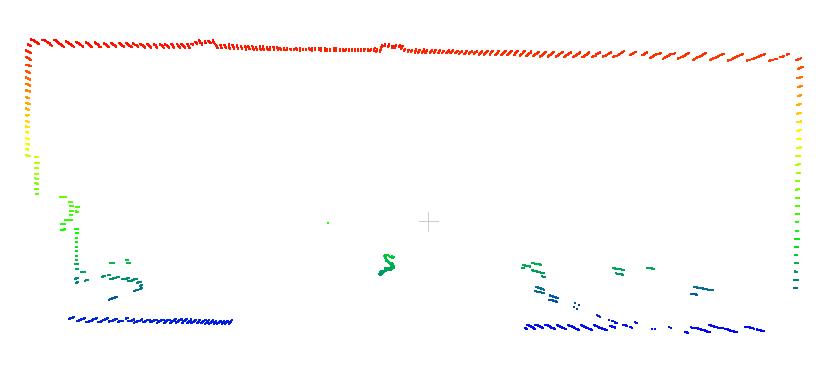
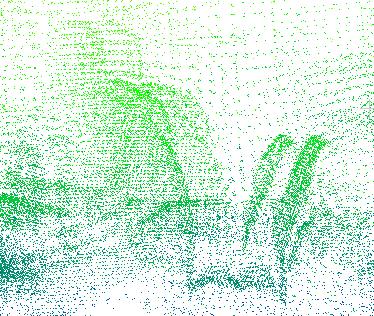
目前的硬件获取数据出现了这么个问题,应该是激光没有安装好,扫描方向没有真正沿着铅锤方向。考虑进行校准。
初步校正了一下,可以差不多看了,不过发现北阳的误差真的很大啊!北阳激光采集点本身需要运动补偿吗?
(PS:点云数据误差大的原因是计算角度是int型和double型转换出现了问题,已经解决。2017/12/31备注)
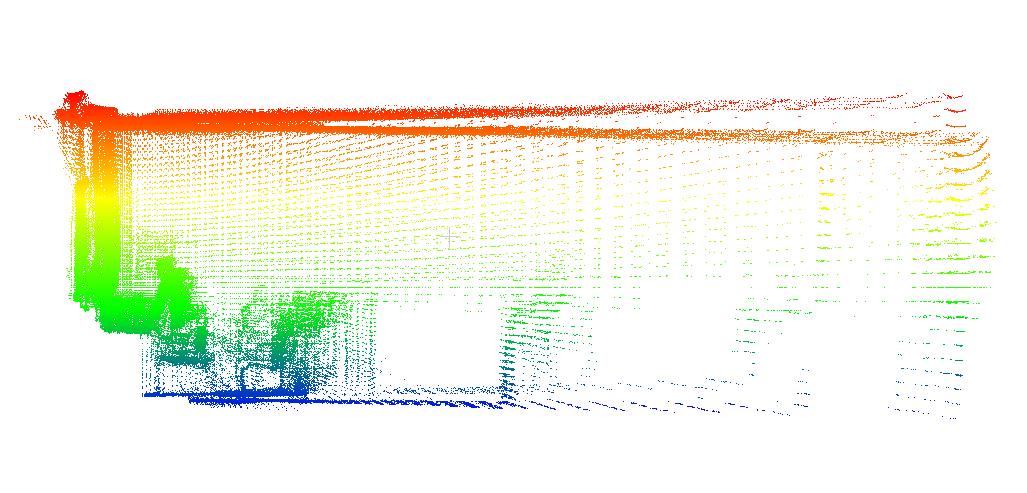
目前三维点云存在问题:重影,旋转一圈之后获取的数据产生了重影。
考虑两方面的原因:(1)旋转误差,旋转360度回不到0点。不仅仅是旋转误差,而是安装三个方向都有可能存在误差。(2)运动误差。现在考虑先解决后面一个,进行运动补偿!在云台转动很慢的情况下10deg/s仍然偏差很大,因此优先需要解决的应该是安装误差。
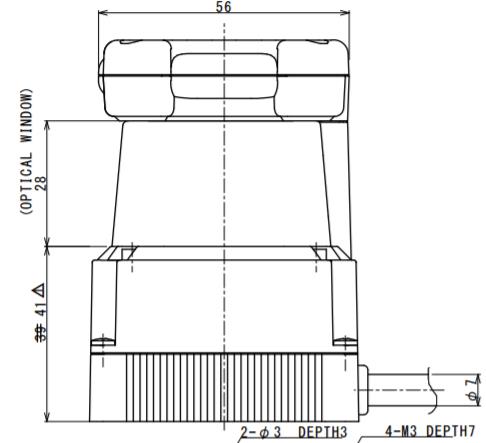
经过确定,重影问题是由于激光扫描面到旋转中心的距离设置不准造成的。
除了安装台本身的距离,还要加上北阳激光的扫描高度41mm+(28/2)mm。这样数据基本消除重影了。
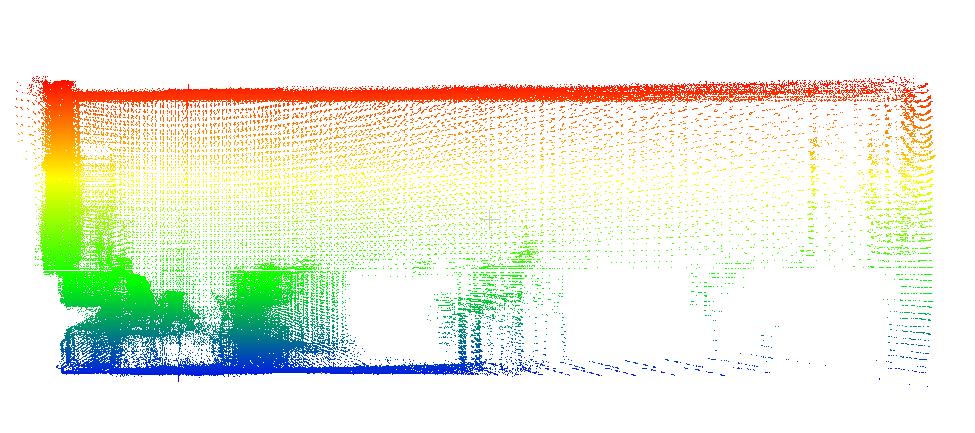
不过数据仍处在问题。安装误差仍然没有完全消除。
之前的数据转180度可以得到一幅基本完整的点云,但是再转180度得到的点云与前面的点云存在一定的旋转误差。很是奇怪。(备注:云台有安装误差)
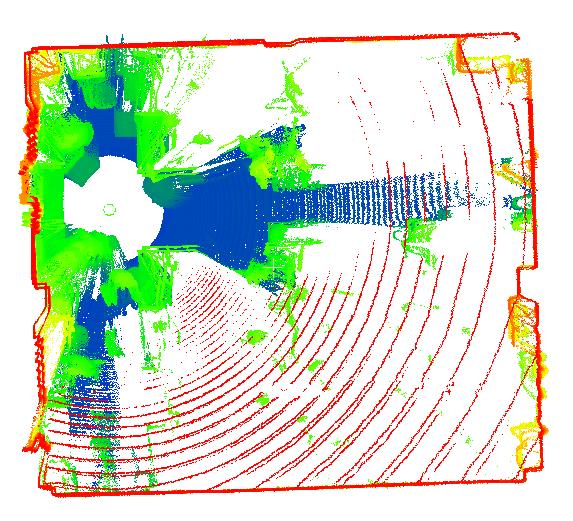
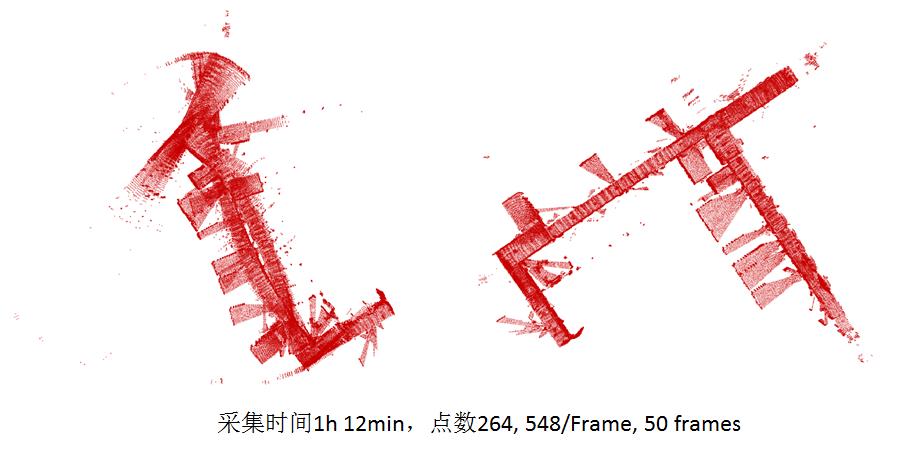
折腾的许久,发现可能是云台的问题,原来云台每旋转360度,会有0.21的偏差。应该是因为波特率和角度之间关系不能整除造成的吧。总之做了一个线性补偿。现在数据基本成型了。如果说有问题的话,那就是北阳的激光实在是误差不小。这个我估计也没有办法了!
补两个图,2013.3.29完成的工作,之前的一年八个月的工作可以串起来了。
以上是关于[Hardware]三维点云数据获取的主要内容,如果未能解决你的问题,请参考以下文章