V-rep学习笔记:外部函数调用方式
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了V-rep学习笔记:外部函数调用方式相关的知识,希望对你有一定的参考价值。
The remote API functions are interacting with V-REP via socket communication in a way that reduces lag and network load to a great extent. The remote API can let one or several external applications interact with V-REP.
A remote API function is called in a similar fashion as a regular API function, however with 2 major differences:
- most remote API functions return a similar value: a return code.
- most remote API functions require two additional argument: the operation mode, and the clientID (identifier returned by the simxStart function)
由于客户端和服务器使用socket套接字进行通信,因此就涉及到网络编程时常见的同步(Sync)/异步(Async),阻塞(Block)/非阻塞(Unblock)等调用方式。The need for an operation mode and a specific return code comes from the fact that the remote API function has to travel via socket communication to the server (V-REP), execute a task, then return to the caller (the client). A naive (or regular) approach would be to have the client send a request, and wait until the server processed the request and replied: in most situations this would take too much time and the lag would penalize the client application. Instead, the remote API lets the user chose the type of operation mode and the way simulation advances by providing four main mechanisms to execute function calls or to control the simulation progress:
- Blocking function calls(a blocking function call is the naive or regular approach)
- Non-blocking function calls
- Data streaming
- Synchronous operation
1. Blocking function calls(阻塞调用)
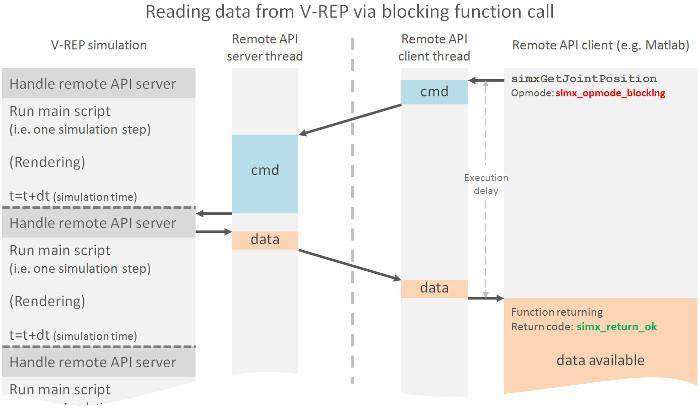
这种方式在调用结果返回之前,当前线程会被挂起。函数只有在得到结果之后才会返回。比如下面代码获取物体句柄,操作模式采用阻塞模式simx_opmode_blocking(A command is sent to the server for execution, and the function waits for the reply from the server)
// Following function (blocking mode) will retrieve an object handle: if (simxGetObjectHandle(clientID,"myJoint",&jointHandle,simx_opmode_blocking)==simx_return_ok) { // here we have the joint handle in variable jointHandle! }
下图反映了阻塞调用的流程:
 2. Non-blocking function calls(非阻塞调用)
2. Non-blocking function calls(非阻塞调用)
非阻塞指在不能立刻得到结果之前,该函数不会阻塞当前线程,而会立刻返回。非阻塞调用适用于不需要服务端应答的场合(A non-blocking function call is meant for situations when we simply want to send data to V-REP without the need for a reply)。如下面例子,只是调用函数设置关节位置而不需要服务端返回数据,就可以使用非阻塞模式simx_opmode_oneshot。
// Following function (non-blocking mode) will set the position of a joint: simxSetJointPosition(clientID,jointHandle,jointPosition,simx_opmode_oneshot);
下图反映了非阻塞调用的流程:

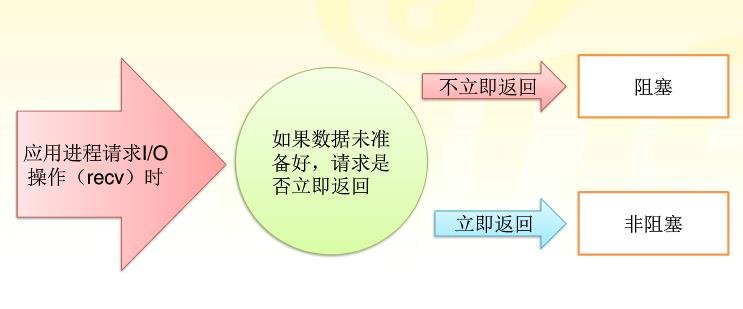
阻塞/非阻塞,是指程序在等待消息时的状态。简单理解为需要做一件事能不能立即得到应答返回。如果不能立即获得返回,需要等待,那就阻塞了;否则就可以理解为非阻塞。详细区别如下图所示:
有时为了同时发送多条指令给服务端响应,我们可以先暂停通信。In some situations, it is important to be able to send various data within a same message, in order to have that data also applied at the same time on the server side (e.g. we want the 3 joints of a robot to be applied to its V-REP model in the exact same time, i.e. in the same simulation step). In that case, the user can temporarily halt the communication thread in order to achieve this, as shown in following example:
simxPauseCommunication(clientID,1); //Allows to temporarily halt the communication thread from sending data. simxSetJointPosition(clientID,joint1Handle,joint1Value,simx_opmode_oneshot); simxSetJointPosition(clientID,joint2Handle,joint2Value,simx_opmode_oneshot); simxSetJointPosition(clientID,joint3Handle,joint3Value,simx_opmode_oneshot); simxPauseCommunication(clientID,0); // Above\'s 3 joints will be received and set on the V-REP side at the same time
Following diagram illustrates the effect of temporarily halting the communication thread:

3. Data streaming(数据流模式)
这一模式下,客户端可以向服务端发起请求连续的数据流。可以将其看做一种客户与服务端之间的命令/信息订阅模式(也可以类比模拟信号采集卡的连续采样功能:Analog Input在采样过程中每相邻两个采样点的时间相等,采集过程中不停顿,连续不间断的采集数据,直到用户主动停止采集任务)。客户端发起数据流请求及读取的代码如下所示:
// Streaming operation request (subscription) (function returns immediately (non-blocking)): simxGetJointPosition(clientID,jointHandle,&jointPosition,simx_opmode_streaming); // The control loop: while (simxGetConnectionId(clientID)!=-1) // while we are connected to the server.. { // Fetch the newest joint value from the inbox (func. returns immediately (non-blocking)): if (simxGetJointPosition(clientID,jointHandle,&jointPosition,simx_opmode_buffer)==simx_return_ok) { // here we have the newest joint position in variable jointPosition! } else { // once you have enabled data streaming, it will take a few ms until the first value has arrived. So if // we landed in this code section, this does not always mean we have an error!!! } } // Streaming operation is enabled/disabled individually for each command and // object(s) the command applies to. In above case, only the joint position of // the joint with handle jointHandle will be streamed.
simx_opmode_streaming: non-blocking mode. Similar to simx_opmode_oneshot, but with the difference that the command will be stored on the server side , continuously executed, and continuously sent back to the client. This mode is often used with "get-functions" (e.g. simxGetJointPosition), where the user requires a specific value constantly.
simx_opmode_buffer: non-blocking mode. No command is sent to the server, but just a reply to a same command, previously executed. This mode is often used in conjunction with the simx_opmode_streaming mode: first, a constant command execution is started with a streaming command, then only command replies fetched.
Following diagram illustrates data streaming:

当完成任务后,客户端需要主动发送请求停止数据流(otherwise the server will continue to stream unessesary data and eventually slow down)。使用simx_opmode_discontinue操作模式来停止数据流。simx_opmode_discontinue: non-blocking mode. This mode is used to interrupt streaming commands.
参考:
以上是关于V-rep学习笔记:外部函数调用方式的主要内容,如果未能解决你的问题,请参考以下文章