第六课 ROS的空间描述和变换
Posted 郭润
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了第六课 ROS的空间描述和变换相关的知识,希望对你有一定的参考价值。
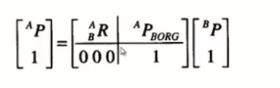
1、空间描述与变换
有两个坐标系A和B,B坐标系中有一个点P,如何把B坐标系中的P映射到A坐标系呢,这就涉及到空间描述与变换,
先看一下旋转矩阵:
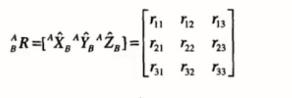
上面中间的行向量 中的元素表示在B坐标系当中的元素用A坐标系来表达。
中的元素表示在B坐标系当中的元素用A坐标系来表达。
 是B坐标原点在A坐标系中的表达,它也是平移量;AP表示P在A坐标系中的表达,BP表示P在坐标系B中的表达。
是B坐标原点在A坐标系中的表达,它也是平移量;AP表示P在A坐标系中的表达,BP表示P在坐标系B中的表达。
要想将BP转换为A坐标系中的表达,就需要乘以旋转矩阵 ,它是旋转量。
,它是旋转量。
下面目的是将B坐标系中的P点在A坐标系中进行表达

将它可以写成齐次坐标的形式如下,
中间的表达式可以成为旋转算子,
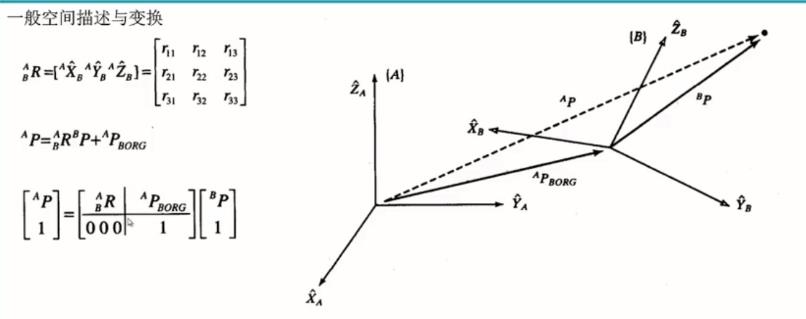
首先,看一下xyz固定角坐标系:
首先将一个坐标系B与一个已知坐标系A重合,先将B坐标系绕XA坐标系逆时针旋转γ角度,这里X轴坐标不变;然后再绕YA坐标轴逆时针旋转β角度;最后绕ZA轴逆时针旋转α角度。每一次旋转都是按照对应的固定参考系。我们将这种姿态的表示方法叫做X-Y-Z固定角坐标系。有时也叫偏航角,横滚角,俯仰角。
再来看一下欧拉表示法:
首先将一个坐标系B与一个已知坐标系A重合,首先将B坐标系绕ZA轴逆时针旋转α角度;再绕YA坐标轴逆时针旋转β角度;最后绕XA坐标系逆时针旋转γ角度。这个与上面的区别在于,每次旋转都是绕着坐标系B中的坐标轴旋转而不是绕着坐标系A中的坐标旋转。
最后来看一下四元素表示法:
与矩阵相比四元组更加高效,占用的空间更小,且便于插值。四元组表示复数,w+xi+yj+zk,其中i,j,k都是虚数单位。可以把四元组看做是一个标量和一个3维向量的组合;实部w表示标量,虚部(x,y,z)用v表示。其中w与旋转角度相关,v与旋转轴相关。
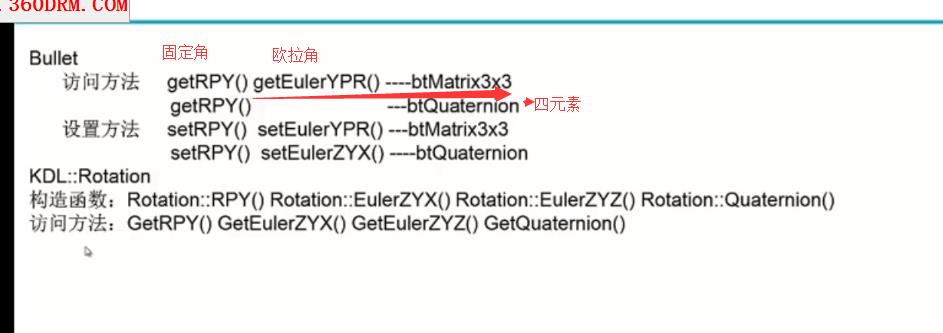
操作四元组,欧拉角或者X-Y-Z固定角可以用Bullet方法,KDL::Rotation方法等
tf
tf的原理
有三个坐标系,一个未知坐标系query,已知坐标系known,一个世界坐标系world
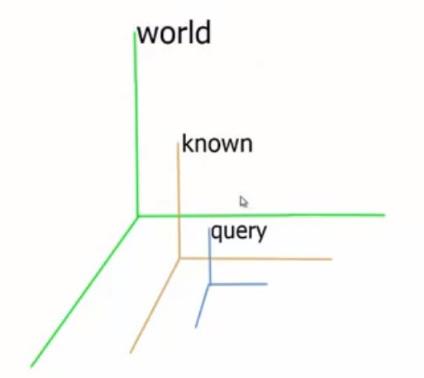
要求得未知坐标系在世界坐标系当中的表达,可以用旋转算子来表示:

未知坐标系在世界坐标系中的旋转算子=未知坐标系在已知坐标系中的旋转算子*已知坐标系在世界坐标系中的旋转算子,通过例子来看一下,
1、roscore
2、roslaunch turtle_tf turtle_tf_demo.launch
出现两只乌龟一只乌龟随着另外一只乌龟跑,
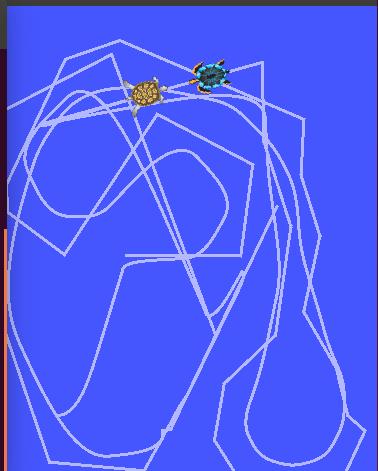
一只乌龟跟随另一只乌龟的运动而运动,这里面就包含三个坐标系,一个是乌龟1坐标系,一个是乌龟2坐标系,还有一个世界坐标系,
使用命令行工具,
view frames是以pdf的形式来展示运行框架的,
rosrun tf view_frames
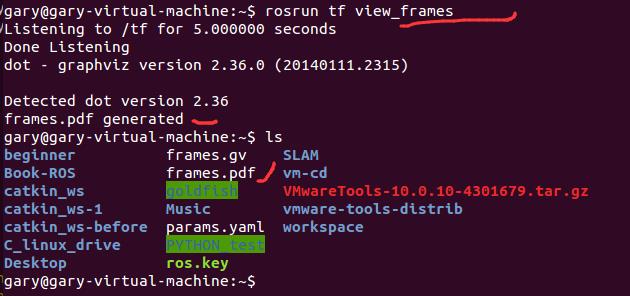
打开该pdf,如下
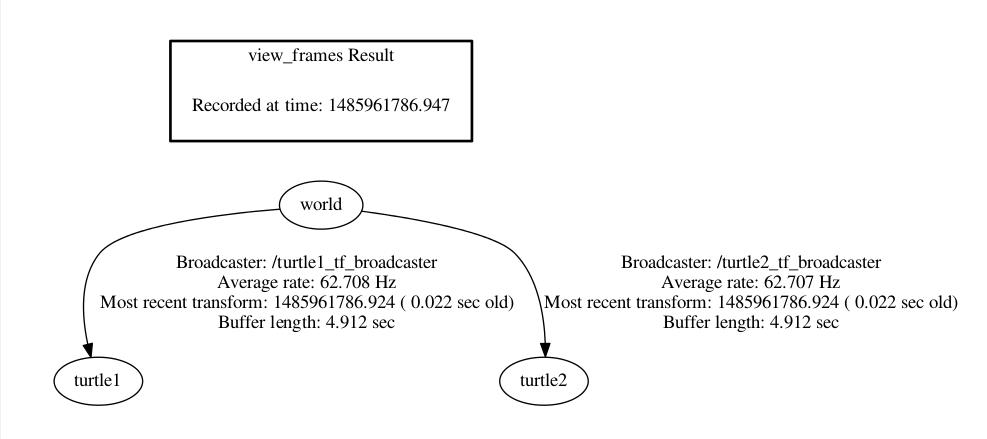
turtle1和turtle2的父坐标系均为world坐标系。
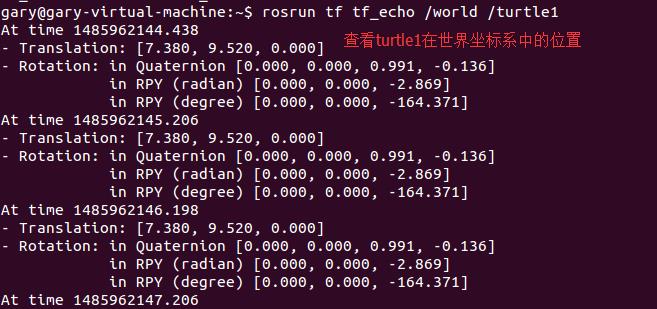
然后再看,
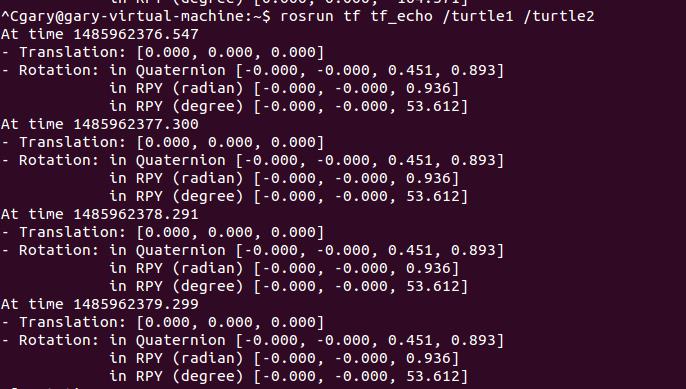
下面看一下turtle1与turtle2作为之间的关系,前者作为父坐标系,后者作为子坐标系
再看一下tf_monitor工具
仍然以turtle1作为父框架,turtle2作为子框架
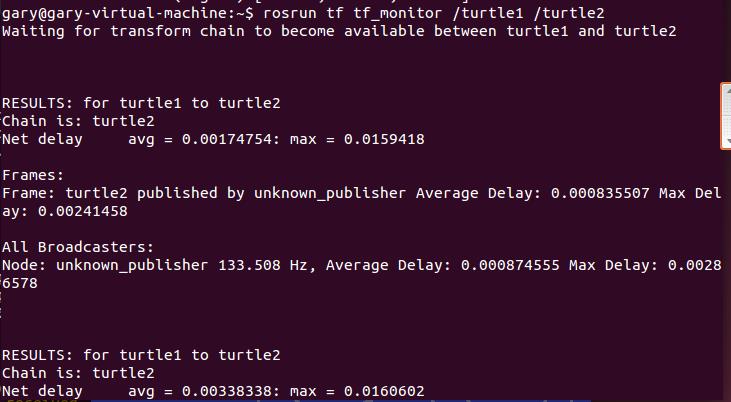
可以看到上面从turtle1到turtle2的变换的相关信息
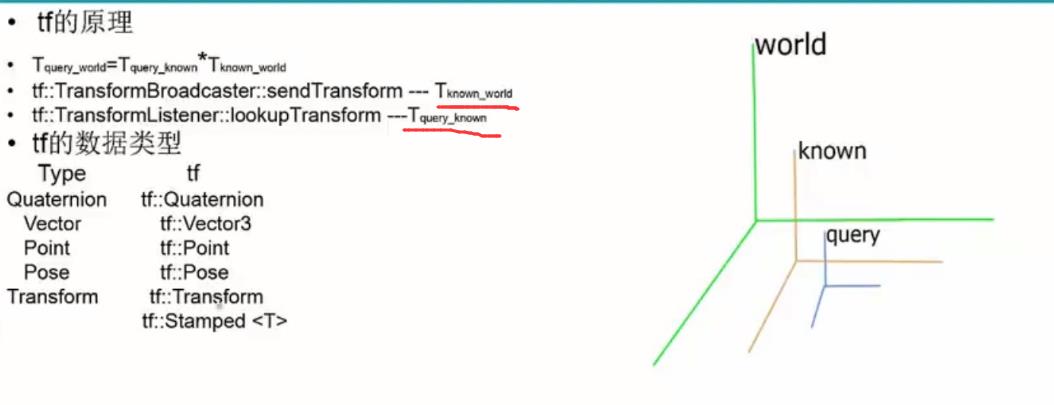
TransformBroadcaster有一个方法sendTransform它可以提供的信息是已知坐标系到世界坐标系的旋转算子。
TransformListener提供了一个方法lookupTransform提供了一个未知坐标系到一个已知坐标系的旋转算子。
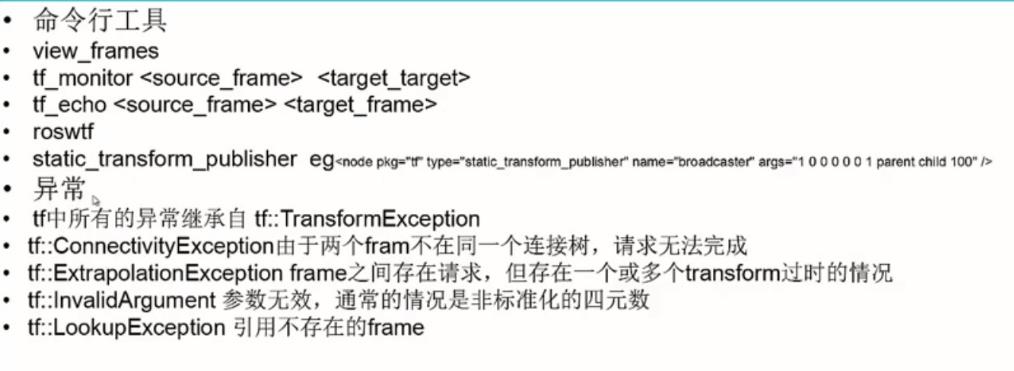
ExtrapolationException异常是两个frame之间存在请求,但是其中有一个frame是过时的,例如turtle1在listen时请求的是turtle2在50秒之前的请求,则会无效。
编写程序实现turtle tf_demo那个例子
打开eclipse,导入工程,然后新建一个源文件turtle_tf_broadcaster.cpp
#include<ros/ros.h>
#include<tf/transform_broadcaster.h>
#include<turtlesim/Pose.h>//turtlesim广播的是一个位姿消息,包括位置和角度
//定义一个全局变量,用于在命令行中输入turtle的名字
std::string turtle_name;
//回调函数的消息为turtlesim的msg
void posecallback(turtlesim::PoseConstPtr &msg)
{
//创建一个TransformBroadcaster存储变换的相关信息
static tf::TransformBroadcaster br;
//接着创建一个对象Transform存储变换的相关信息,它包含旋转和位移的信息,有一个向量叫做Vector3表示坐标,以及四元组表示方向
tf::Transform transform;
//下面把turtlepose的相关信息copy到transform中,通过transform在tf树中进行广播,
transform.setOrigin(tf::Vector3(msg->x,msg->y,0));
//创建一个四元组
tf::Quaternion q;
//调用它的方法,因为它是绕着z轴旋转故有下面参数形式
q.setRPY(0,0,msg->theta);
//为transform的rotation赋值
transform.setRotation(q);
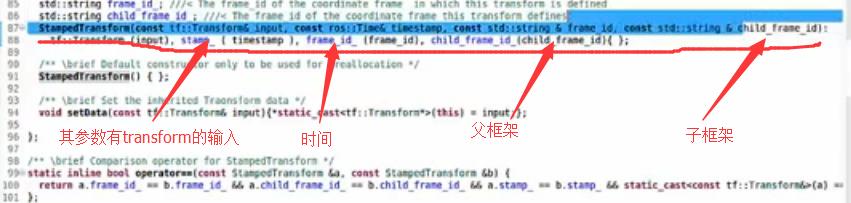
//然后再广播出去,创建一个transform::stamped对象
br.sendTransform(tf::StampedTransform(transform,ros::Time::now(),"world",turtle_name));
}
int main(int agc,char **argv)
{
ros::init(argc,argv,"turtle_tf_broadcaster");
if(argc!=2)
{
ROS_ERROR("need turtle name as argument.");
return -1;
}
turtle_name=argv[1];//传递进来的名字
ros::NodeHandle node;
//下面创建一个subscriber订阅对象,订阅的主题是turtle_name+"/pose",列表长度为10,回调函数为posecallback
ros::Subscriber sub=node.subscribe(turtle_name+"/pose",10,&posecallback);
ros::spin();
return 0;
}
下面修改CMakeLisets.txt文件
add_executable(turtle_tf_broadcaster src/turtle_tf_broadcaster.cpp)
target_link_libraries(turtle_tf_broadcaster ${catkin_LIBRARIES})
以上是关于第六课 ROS的空间描述和变换的主要内容,如果未能解决你的问题,请参考以下文章