边缘检测
Posted 三年一梦
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了边缘检测相关的知识,希望对你有一定的参考价值。
图像边缘是图像局部特征不连续性(灰度突变、纹理结构突变等)的反映,它标志着一个区域的终结和另一个区域的开始。边缘的特征是沿边缘走向的像素变化平缓,而垂直于边缘方向的像素变化剧烈。在图像边缘的较小领域中的像素集,它们的灰度值是不连续的,会有较大的跃变。因此可以通过导数来判别图形中像素的灰度值是否存在突变,从而检测出边缘。一般可以用一阶导数和二阶导数来实现。
1.基于一阶导数的边缘检测
1)检测原理
设f(x)是一个离散的一元函数,则其一阶导数可定义为: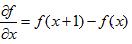 ,由于图像的灰度值函数f(x,y)是一个离散的二元函数,因此通常用梯度来表示图像的一阶导数。所谓梯度指两个由一阶导数组成的向量,其定义为:
,由于图像的灰度值函数f(x,y)是一个离散的二元函数,因此通常用梯度来表示图像的一阶导数。所谓梯度指两个由一阶导数组成的向量,其定义为:
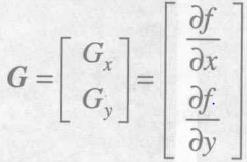
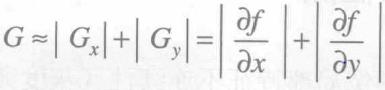
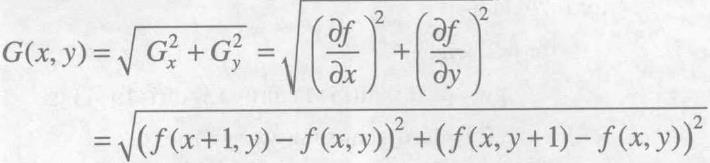
梯度向量的模值大小为:

为了减小计算量,梯度向量模值可用绝对值近似表示为:
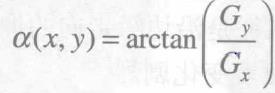
梯度向量的方向角大小为:
在边缘检测中,梯度常指梯度向量的模值。基于一阶导数的边缘检测的基本原理:令坐标为(x,y)
的像素值的梯度值为G(x,y),若满足G(x,y)>=T,T为阈值,则(x,y)为边缘点所在的位置。
综上,像素位置(x,y)的梯度为:
可以用下图中的掩模与点(x,y)的对应邻域内的像素来进行空间卷积得到,若要计算整幅图像所有像素的梯度,只要在图像上方移动掩模,依次进行卷积操作即可。

代码:
function h=EdgeDetect(filename) %基于一阶的边缘检测 %使用的是一阶梯度算子 f=imread(filename); figure,imshow(f); [width,height]=size(f); g=zeros(width,height); h=zeros(width,height); df=im2double(f); wx=[-1 0;1 0]; wy=[-1 1;0 0]; for i=2:width-1 for j=2:height -1 gw=[df(i,j) df(i,j+1);df(i+1,j) df(i+1,j+1)]; g(i,j)=sqrt((sum(sum(wx.*gw)))^2+(sum(sum(wy.*gw)))^2); end end T=0.25*max(g(:)); h=g>=T; figure,imshow(h); %edgedetect(\'ct.bmp\')

常用的基于一阶导数的边缘检测器有Roberts/Prewitt、Sobel、Robinson、Kirsch,它们的实现机理与前面介绍的类似,最主要的区别在于实现导数的方法和掩模的选取不同.
Roberts检测器:
导数公式: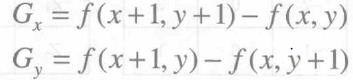
掩模及邻域:
Prewitt检测器:
导数公式:
掩模及邻域: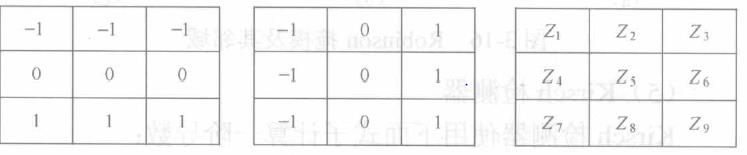
Sobel检测器:
导数公式: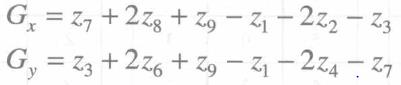
掩模及邻域:
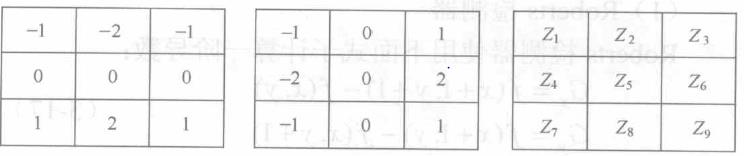
Robinson检测器:
导数公式:
掩模及邻域: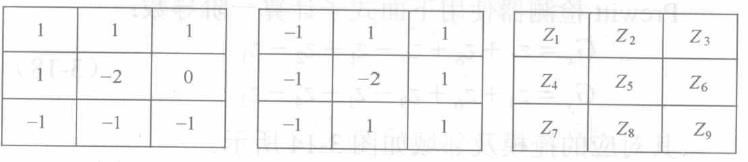
Kirsch检测器:
导数公式:
掩模及邻域:
2.基于二阶导数的边缘检测
1)检测原理
设f(x)是一个离散的一元函数,其二阶导数可定义为:
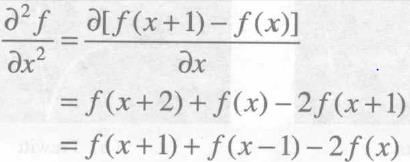
对于二元的图像灰度函数f(x,y),其二阶导数一般使用Laplacian算子进行计算。拉普拉斯算子定义为:


可得: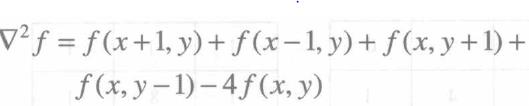
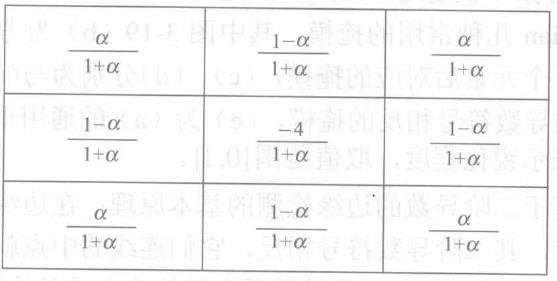
根据上式可得掩模:

通用掩摸如下(α表示锐化程度,取值范围为[0,1]):
基于二阶导数的边缘检测的基本原理:在边缘两侧的像素点,其二阶导数符号相反,他们连线的中点就是边缘的中心。或者说在二阶导数零交叉 的地方就是边缘中心。
从检测原理上看,基于二阶导数的边缘检测包含两部分处理过程:一是计算二阶导数,二十寻找零交叉点。由于二阶导数对噪声相对敏感,因此在 计算前需要对图像进行平滑处理。在选择平滑滤波器时需要满足两个标准:第一,滤波器应该是平滑的且在频域中大致上是有限带宽的,以便减少 会导致函数变化的可能频率数;第二,空间定位的约束要求滤波器的响应需来自于图像中邻近的点。这两个标注是矛盾的,但是通过使用高斯分布 可以同时得到优化。
高斯函数基本形式: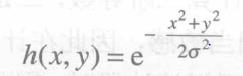
由于高斯函数图形是关于中心对称的,为计算导数方便,可令r2=x2+y2.
则其一阶导数为:
二阶导数为:
得到导数计算公式: 该公式通常称为高斯型的拉普拉斯算子(LoG),由于其图形形状的原 因,该算子也被称为墨西哥草帽(Mexicanhat)。
该公式通常称为高斯型的拉普拉斯算子(LoG),由于其图形形状的原 因,该算子也被称为墨西哥草帽(Mexicanhat)。
综上,可以得到计算图像f(x,y)二阶导数的两种是实现方法:
1)
2) 
上述两个公式是干货,第一种方法是先用高斯与图像做卷积(用一次掩模),再求卷积结果的二阶导数(再用一次卷积掩模)。第二种方法更简单 些利用了卷积与微分运算的可交换性,只需要一次卷积掩模。
 可由下式掩模(LoG掩模)实现:
可由下式掩模(LoG掩模)实现:
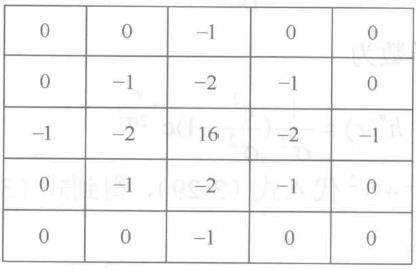
综上可得图像二阶导数对应的LoG图像,下面为寻找零交叉点 两种方法:
1)设LoG图像的所有正值区域为白色,负值区域为黑色。在白色与黑色之间的就是零交叉点。这种方法实现简单,但会出现空心粉效应。
2)使用一个2*2的窗口检测零交叉点,当两种极性的LoG图像数值同时出现在该窗口内时,就将边缘标签任意赋给一个角点,比如说左 上点;当窗口内的数值都是正的或负的时,就不给边缘标签。这种方法灵敏度很高,会检测出非常弱的边缘的零交叉点,因此一 般需要通过一阶导数(下面代码中使用了Sobel算子)来消除这些点。
代码:
function Zero_Crossing(filename) %基于二阶导数的边缘检测 %使用Log掩膜 Laplacian of a Gaussian f=imread(filename); figure,imshow(f); [width,height]=size(f); g1=zeros(width,height); g2=g1; df=im2double(f); w=[0 0 -1 0 0;0 -1 -2 -1 0;-1 -2 16 -2 -1;0 -1 -2 -1 0;0 0 -1 0 0]; for i=3:width-2 for j=3:height-2 gw=[df(i-2,j-2) df(i-2,j-1) df(i-2,j) df(i-2,j+1) df(i-2,j+2);df(i-1,j-2) df(i-1,j-1) df(i-1,j) df(i-1,j+1) df(i-1,j+2);df(i,j-2) df(i,j-1) df(i,j) df(i,j+1) df(i,j+2);df(i+1,j-2) df(i+1,j-1) df(i+1,j) df(i+1,j+1) df(i+1,j+2);df(i+2,j-2) df(i+2,j-1) df(i+2,j) df(i+2,j+1) df(i+2,j+2)]; g2(i,j)=sum(sum(w.*gw)); end end
%使用Sobel算子检测器 wx=[-1 -2 -1;0 0 0;1 2 1]; wy=[-1 0 1;-2 0 2;-1 0 1]; for i=2:width-1 for j=2:height-1 gw=[df(i-1,j-1) df(i-1,j) df(i-1,j+1);df(i,j-1) df(i,j) df(i,j+1);df(i+1,j-1) df(i+1,j) df(i+1,j+1)]; g1(i,j)=sqrt((sum(sum(wx.*gw)))^2+(sum(sum(wy.*gw)))^2)/2; end end for i=1:width for j=1:height if g2(i,j)>0 if(g2(i+1,j)<0 || g2(i,j+1)<0 || g2(i+1,j+1)<0) g2(i,j)=1; else g2(i,j)=0; end elseif g2(i,j)<0 if(g2(i+1,j)>0 || g2(i,j+1)>0 || g2(i+1,j+1)>0) g2(i,j)=1; else g2(i,j)=0; end else g2(i,j)=0; end end end g1=g1>=0.25*max(g1(:)); g=g1.*g2; figure,imshow(g);

以上是关于边缘检测的主要内容,如果未能解决你的问题,请参考以下文章