kinect1在ros-indigo环境配置
Posted CZM&
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了kinect1在ros-indigo环境配置相关的知识,希望对你有一定的参考价值。
根据周大神前车,向git下载驱动里面有详细的安装说明
$ cd $ git clone https://github.com/ZXWBOT/kinect_driver.git
按照安装说明三个包安装成功后,
加运行权限
sudo chmod +x /usr/bin/XnSensorServer
运行测试
$ cd ~/kinect_driver/OpenNI-Bin-Dev-Linux-x64-v1.5.7.10/Samples/Bin/x64-Release/
$ ./NiViewer
运行后的效果

驱动就安装成功了
然后就是在ros上面测试
注意ubuntu下不能使用openni2.2和NITE2.2版本的包,有的话卸载
sudo apt-get install ros-indigo-openni-camera ros-indigo-openni-launch
然后运行启动文件
roslaunch openni_launch openni.launch
运行
rostopic list
查看图像话题时候被发布
然后运行查看彩色图像以及深度图像(话题参数要根据自己的调整)
$ rosrun image_view image_view image:=/camera/rgb/image_color $ rosrun image_view image_view image:=/camera/depth/image_raw
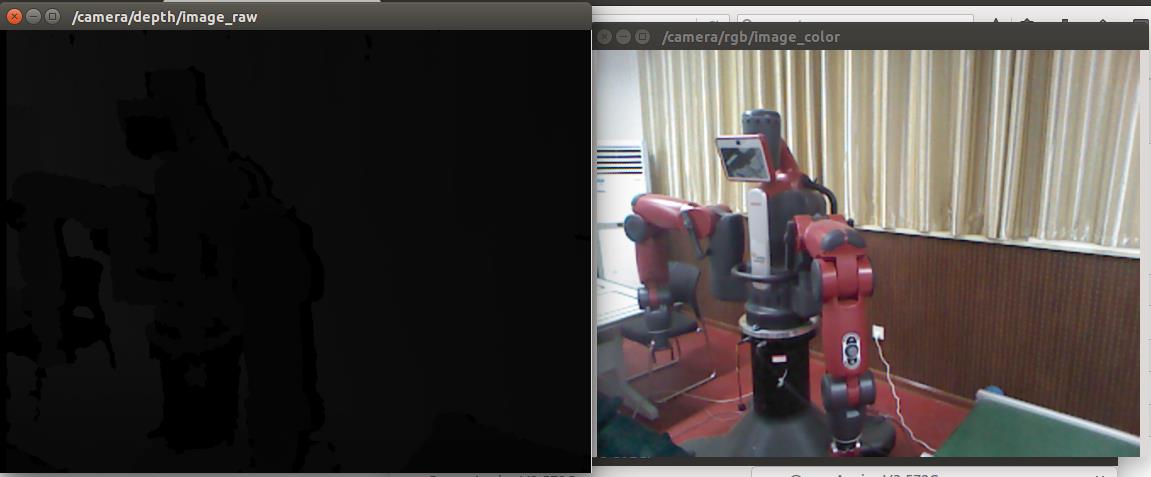
另外添加image和pointcloud修改话题配置如下
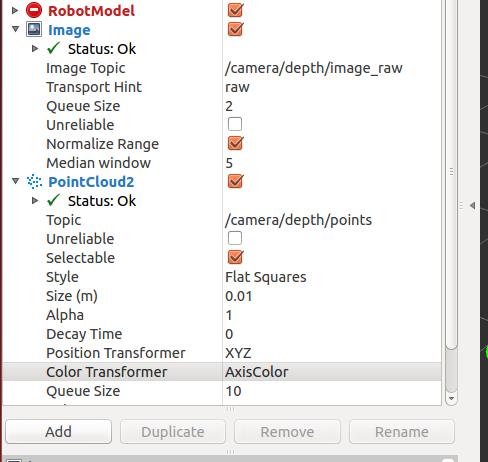
深度图像以及点云图像

以上是关于kinect1在ros-indigo环境配置的主要内容,如果未能解决你的问题,请参考以下文章