如何使用Kinect Sensor
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了如何使用Kinect Sensor相关的知识,希望对你有一定的参考价值。
1. 如果一个非微软的Kinect驱动安装在你的Windows PC上,那么请卸载它,再安装微软的Kinect驱动,否则可能Kinect不工作;
2. 务必给Kinect连接外接电源—如果你想让Kinect全力工作的话;如果Kinect只依靠
通过USB端口提供的电源,那么它只能发挥最小限度的功能; 3. 播放标准的音频和视频,不需要特定的软件;
4. 如果你使用USB hub的话,那么Kinect将是接在USB hub上的唯一设备。如果你有
多个Kinect,请把它们连接到不同的USB Controllers。如果2台Kinect连接到了一个USB端口上,那么只有一个能正常工作; 5. Kinect内置了一个风扇来防止过热。风扇是由Kinect的固件控制的,一旦温度达到
90摄氏度,摄像头就会关闭。没有提供能控制风扇的API. 6. 合理的光照—不能太强也不能太弱,对于RGB摄像头是非常重要的。白炽光、荧光
灯和自然光照没有问题。切忌用强烈的光连续照射摄像头,这会“弄瞎”摄像头的。 7. 深度传感器在普通和弱光下工作正常,只是在接近黑暗的光照下会增加信号中的噪声。
8. 深度传感器是通过反射光来分析深度信息的。因此,强反射的(如镜子,打磨的金属)、强吸光的物体可能不会被识别的非常好。
加载完驱动后,现在开始设置你的开发环境。如果你使用的是Visual Studio,请阅读下面的开发环境设置知识来帮助你创建你的第一个C#或C++应用程序。 参考技术A 1.如果一个非微软的Kinect驱动安装在自己的Windows PC上,那么请卸载它,再安装微软的Kinect驱动,否则可能Kinect不工作;
2. 务必给Kinect连接外接电源—如果想让Kinect全力工作的话;如果Kinect只依靠
通过USB端口提供的电源,那么它只能发挥最小限度的功能;
3. 播放标准的音频和视频,不需要特定的软件;
4. 如果使用USB hub的话,那么Kinect将是接在USB hub上的唯一设备。如果有
多个Kinect,请把它们连接到不同的USB Controllers。如果2台Kinect连接到了一个USB端口上,那么只有一个能正常工作;
5. Kinect内置了一个风扇来防止过热。风扇是由Kinect的固件控制的,一旦温度达到
90摄氏度,摄像头就会关闭。没有提供能控制风扇的API.
6. 合理的光照—不能太强也不能太弱,对于RGB摄像头是非常重要的。白炽光、荧光
灯和自然光照没有问题。切忌用强烈的光连续照射摄像头,这会“弄瞎”摄像头的。
7. 深度传感器在普通和弱光下工作正常,只是在接近黑暗的光照下会增加信号中的噪声。
8. 深度传感器是通过反射光来分析深度信息的。因此,强反射的(如镜子,打磨的金属)、强吸光的物体可能不会被识别的非常好。
加载完驱动后,现在开始设置开发环境。如果使用的是Visual Studio,请阅读开发环境设置知识来帮助创建自己的第一个C#或C++应用程序。
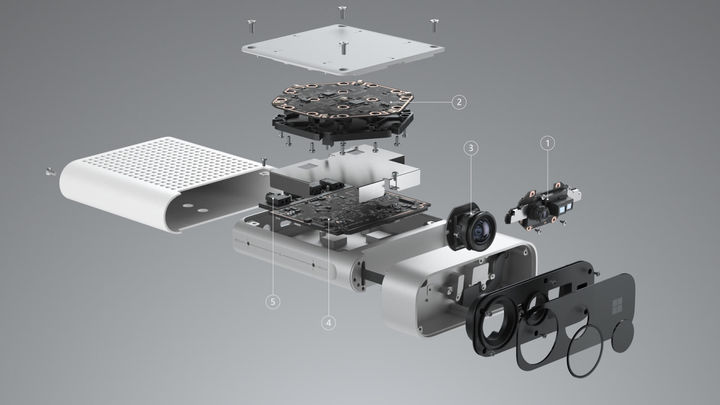
Azure Kinect SDK Ubuntu18.04安装使用
Azure Kinect SDK Ubuntu18.04安装使用
文章目录
Azure-Kinect-Sensor-SDK GitHub网址:
Azure-Kinect-Sensor-SDK
1.下载 1.4.0 版本 SDK
git clone -b v1.4.0 https://github.com/microsoft/Azure-Kinect-Sensor-SDK.git Azure-Kinect-Sensor-SDK-v1.4.0

2.安装依赖
来自 v1.2.0 版本中的 script/bootstrap-ubuntu.sh脚本文件
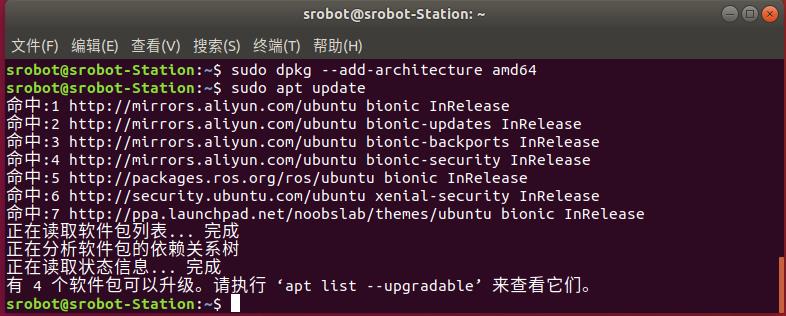
sudo dpkg --add-architecture amd64
sudo apt update
sudo apt install -y pkg-config ninja-build doxygen clang gcc-multilib g++-multilib python3 nasm cmake libgl1-mesa-dev libsoundio-dev libvulkan-dev libx11-dev libxcursor-dev libxinerama-dev libxrandr-dev libusb-1.0-0-dev libssl-dev libudev-dev mesa-common-dev uuid-dev
3.下载深度引擎库文件
https://packages.microsoft.com/ubuntu/18.04/prod/pool/main/libk/
从上面的网站下载 libk4a1.2 中 libk4a1.2_1.2.0_amd64.deb文件

解压 .deb 文件,再解压内部的 data.tar.gz文件

将解压文件夹 usr/lib/x86_64-linux-gnu 中的 libdepthengine.so.2.0 文件拷贝到系统目录 /usr/lib/x86_64-linux-gnu 下。

sudo cp libdepthengine.so.2.0 /usr/lib/x86_64-linux-gnu
4.编译安装
在SDK文件夹中
mkdir build && cd build
cmake .. -GNinja

ninja -j8
sudo ninja install

5.安装依赖
sudo add-apt-repository ppa:ubuntu-toolchain-r/test

sudo apt-get update

sudo apt-get install gcc-4.9
出错:
正在读取软件包列表... 完成
正在分析软件包的依赖关系树
正在读取状态信息... 完成
没有可用的软件包 gcc-4.9,但是它被其它的软件包引用了。
这可能意味着这个缺失的软件包可能已被废弃,
或者只能在其他发布源中找到
E: 软件包 gcc-4.9 没有可安装候选

解决办法:
-
使用如下命令打开源文件:
sudo gedit /etc/apt/sources.list -
在打开的文件中添加如下源
deb http://dk.archive.ubuntu.com/ubuntu/ xenial main
deb http://dk.archive.ubuntu.com/ubuntu/ xenial universe -
使用如下命令更新源
sudo apt update -
执行安装
sudo apt-get install gcc-4.9
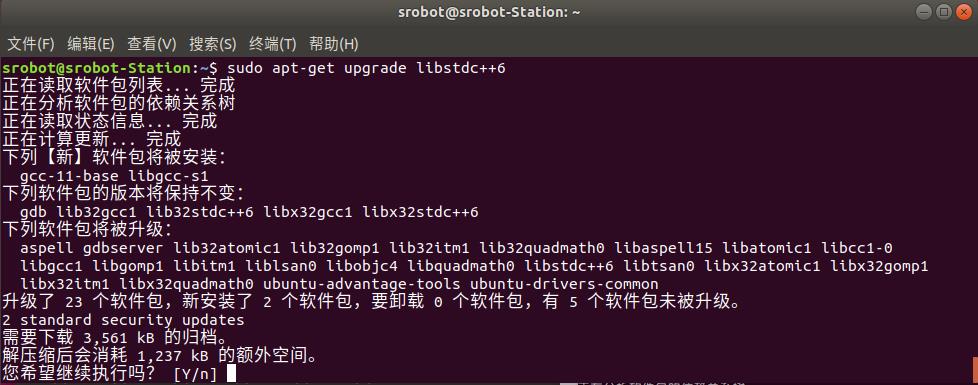
sudo apt-get upgrade libstdc++6
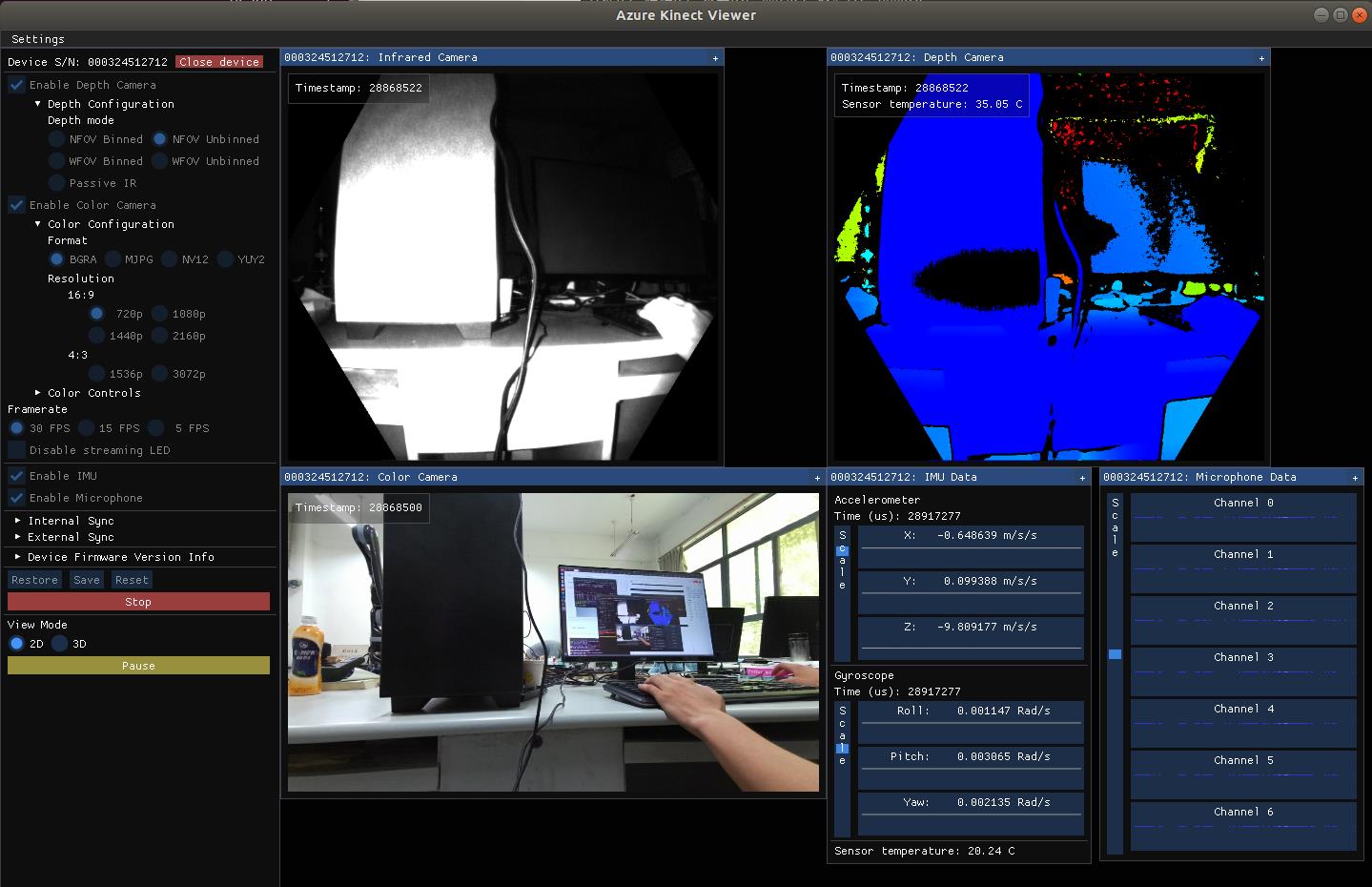
6.启动 k4aviewer
在 build 路径下
sudo ./bin/k4aviewer
权限设置
cd ~/Azure-Kinect-Sensor-SDK
sudo cp scripts/99-k4a.rules /etc/udev/rules.d/.
以上是关于如何使用Kinect Sensor的主要内容,如果未能解决你的问题,请参考以下文章