二叉搜索树和最优二叉搜索树的时间复杂度各是多少?
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了二叉搜索树和最优二叉搜索树的时间复杂度各是多少?相关的知识,希望对你有一定的参考价值。
最优二叉搜索树不是用了三重循环么?那样不应该是O(n的三次方)么?
1、每个节点包含一个键值
2、每个节点有最多两个孩子
3、对于任意两个节点x和y,它们满足下述搜索性质:
a、如果y在x的左子树里,则key[y] <= key[x]
b、如果y在x的右子树里,则key[y] >= key[x]
最优二叉查找树(Optimal BST,Optimal Binary Search Tree)
最优二叉查找树是使查找各节点平均代价最低的二叉查找树。具体来说就是:给定键值序列 K = <k1 , k2 , . . . , kn >,k1 < k2 <· · · < kn ,其中键值ki ,被查找的概率为pi ,要求以这些键值构建一颗二叉查找树T,使得查找的期望代价最低(查找代价为检查的节点数)。
下面是对于查找期望代价的解释:
对于键值ki , 如果其在构造的二叉查找树里的深度(离开树根的分支数)为depthT(ki ),则搜索该键值的代价= depthT(ki ) +1(需要加上深度为0的树根节点)。由于每个键值被查找的概率分别为pi ,i=1,2,3…,n。所以查找期望代价为:
E[T的查找代价] = ∑i=1~n (depthT(ki ) +1) · pi
时间复杂度
1、穷举
穷举构造最优二叉查找树,其实就是这样的一个问题:
给一个拥有n个数的已排序的节点,可以将其构造成多少种不同的BST(用来找到一个最优的二叉查找树)?
设可以构造成T(n)个,那么枚举每一个元素作为根节点的情况,当第一个元素作为根节点时,其余n-1个构成右子树,无左子树,是n-1情况时的子问题, 共T(n-1)种;当第二个元素作为根节点时,左子树有1个元素,右子树有n-2个元素,根据乘法原理共有T(1)T(n-2)种情况……依此类推得 到:T(n) = T(0)T(n-1) + T(1)T(n-2) + T(2)T(n-3) + ...... + T(n-2)T(1) + T(n-1)T(0);此外,有T(0)=T(1)=1。
下面来求解T(n):
定义函数 f(x) = T(0) + T(1) · x + T(2) · x2 + ......
那么有:
f(x)2 = (T(0)2 ) + (T(0)T(1) + T(1)T(0)) · x + (T(0)T(2) + T(1)T(1) + T(2)T(0)) · x2 + ......
= T(1) + T(2) · x + T(3) · x2 + ......
= (f(x) - T(0)) / x
= (f(x) - 1) / x
这样解方程得到 f(x) = [1 - (1 - 4x)1/2 ] / 2x
右边进行泰勒展开,再与定义式比较最终得到: T(n) = (2n)! / (n!(n+1)!)
然后根据Stirling公式:n! ~ (2πn)1/2 · (n/e)n
于是有(2n)! / n!(n+1)! ~ (4n1/2 · 2n2n ) / (2n1/2 · nn · (2(n+1))1/2 · (n+1)n )
~ 4n · (n+1)-3/2 · (n/(n+1))n
~ 4n · n-3/2
因此最后得到穷举方法构造最优二叉查找树的时间复杂度: T(n) = O(4n · n-3/2 )
2、递归
实际上左右子树是互不影响的,不需要穷举所有左右子树的组合,所以不需要用乘法原理,加法原理就可以了,这样式子变为:
T(n) = T(0) + T(n-1) + T(1) + T(n-2) + T(2) + T(n-3) + ...... + T(n-2) + T(1) + T(n-1) + T(0)
= 2(T(0) + T(1) + T(2) + ...... + T(n-1))
= 3T(n-1)
所以得到T(n) = O(3n ) ,还是指数级的一个算法
3、动态规划
上面得到指数级算法的原因在于,计算了很多重复的子树情况,一些子树的查找代价被计算了很多遍;而一棵树如果是最优二叉搜索树,那么要么它是空树,要么它 的左、右子树也是最优二叉搜索树,因此只需要将子树的查找代价记录下来,采用记忆化搜索或者是自底向上的动态规划的方法,虽然需要消耗一定的空间,但可以 把时间复杂度从指数级降到多项式级,这些空间消耗也是可以接受的。
以下是采用自底向上的解法:
输入:键值序列 K = <k1 , k2 , . . . , kn >,概率序列 P = <p1 , p2 , . . . , pn >
输出:两个二维数组,Price[i][j]表示ki 到kj 构成的最优子树的查找代价,Root[i][j]表示表示ki 到kj 构成的最优子树的根节点位置(用于重构最优二叉查找树)
算法1 :
For 子树大小size = 1 to n
For 子树的起点start = 1 to (n - size + 1) //这样子树的终点即为 end = start + size - 1,长度为size
For 该子树的所有节点作为根节点root = start to end
对于每个root,根据之前计算过的Price数组得到左右最优子树的代价,可直接得到该子树的代价price为:
左右子树的最优子树代价之和 + 所有节点的访问概率之和(因为所有节点都下降了一层)
在内层循环中找到代价最小的price和root分别记录在Price[start][end]和Root[start][end]中
下面分析这个算法的时间复杂度:
由于除了计算出我们最后需要得到的Price和Root二维数组,还产生了部分冗余的子树,因此不能简单的将算法归结为O(n2 )的算法。
对于子树大小为1时,我们考察了n个子树;
对于子树大小为2时,一共产生了(n - 1)个最优子树,但是在我们的每次考察中,都将子树的所有节点作为根节点考虑过一次,因此每得到1个大小为2的子树,我们需要考察2个不同的子树来找到一 个代价最小的,因此最后我们实际上考察了2(n - 1)个子树;
对于子树大小为3时,类似的,我们考察了3(n - 2)个子树;
……
对于子树大小为n时,我们考察了n个子树。
最后,我们一共考察了T(n) = n + 2(n - 1) + 3(n - 2) + ...... + n个子树。
求解这个公式依然可以借用之前的方法,定义函数 f(x) = 1 + 2x + 3x2 + ...... = (1 - x)-2
这样一来 f(x)2 = T(1) + T(2) · x + T(3) · x2 + ......
再借用泰勒展开得到 T(n) = (n + 2)(n + 1)n/6 = O(n3 )
或者把所有项视为n2,则有 T(n) ≤ n2 + n2 + n2 + n2 + ...... = (n+1)n2 ≤ 2n3
把中间n/2项都视为n/4 · 3n/4的话,则有 T(n) ≥ n/2 · n/4 · 3n/4 = (3/32)n3
根据时间复杂度的定义有 T(n) = O(n3 )
下面介绍一个定理,可以借此把动态规划算法的时间复杂度进一步降到O(n2 ),详细的证明参见参考文献:
定理1 :Root[i][j-1] ≤ Root[i][j] ≤ Root[i+1][j] (Root数组定义见算法1)
也就是说,算法1的第3个For就可以不用循环子树中的所有节点了,只要循环另两个子树的根节点之间的范围就可以了。算法如下,红色的为修改的部分:
算法2 :
For 子树大小size = 1 to n
For 子树的起点start = 1 to (n - size + 1) //这样子树的终点即为 end = start + size - 1,长度为size
For 该子树的所有节点作为根节点root = Root[start][end-1] to Root[start+1][end]
对于每个root,根据之前计算过的Price数组得到左右最优子树的代价,可直接得到该子树的代价price为:
左右子树的最优子树代价之和 + 所有节点的访问概率之和(因为所有节点都下降了一层)
在内层循环中找到代价最小的price和root分别记录在Price[start][end]和Root[start][end]中
在分析该算法的时间复杂度时应注意,考察的子树是与考察的内层循环中root数量一一对应的,而当start递进时,前一个root的终点正好等于后一个root的起点(算法中的红色部分),也就是说对于固定的size来说,考察的root的范围加起来应当首位相接 而且至多刚好覆盖 所有节点,因此对于每个size,最多只考察2n个root(这里缩放了一下),因此总共最多考察了2n · n = 2n2 个子树;另一方面,Root数组中每一个值对应得到的一个最优二叉查找树,也即至少需要考察n2 个子树。因此根据定义得到 T(n) = O(n2 ) 参考技术A 二叉搜索树
最好:以2为底n的对数
最坏:n
最优二叉搜索树
最好/最坏:以2为底n的对数本回答被提问者采纳
动态规划习题之最优二叉搜索树
题目
问题描述:
给定一个n元素的中序序列,它可以有卡特兰数个不同形状的二叉排序树。(卡特兰数的定义及证明参见组合数学):
,如果我们知道每个键的查找概率,怎么来构造一个平均查找代价最小(查找成功)的最优二叉查找树呢?
-----------------------------------------------------------------------------------------------------------
用动态规划来求解,首先要找到它的最优子结构性质,然后根据这个最优子结构来描述和刻画问题,得到状态转移的方程:
1)最优子结构性质:
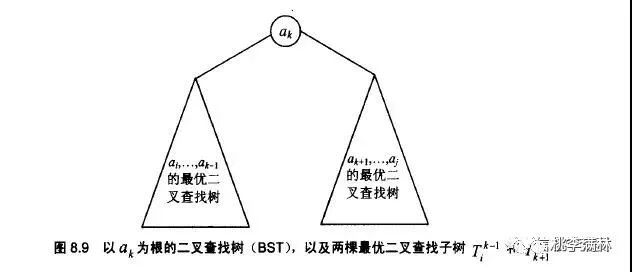
看看一颗最优二叉查找树是怎么得到的?逆向思维,如果现在有一棵最优二叉查找树,root是ak,很容易得出:ak的左右子树也是最优二叉查找树(如果它的子树不是最优的,那就说明这个子树还可以继续调整,那么ak那颗树就也不是最优的了)。
2)根据最优子结构性质来描述和刻画问题
用C[i , j]表示从 i 到 j 的最优二叉查找树的代价,那么问题就被划分为了n^2个子问题了(顶点号从0计数),假设有n个顶点,那么我们的目标是要求C[0 , n-1]。(编号从0还是1开始无所谓,在编程的时候注意下标范围就行了)。
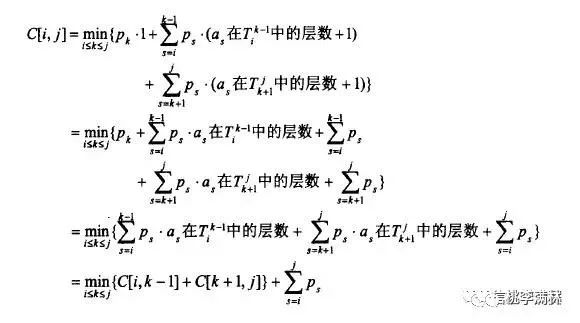
现在根据它的最优子结构来找状态转移方程:从 i 到 j的一个最优二叉查找树是怎么得到的?(即一个C[i , j]是怎么来的),它是从 i 到 j 之间的顶点中选出一个顶点来做root,假设选出的这个做root的顶点是 k (i <= k <= j ),那么显然有:

这个式子其实可以直接想到,不用那么复杂的推导,它就是要找一个能使得C[i , j]代价最小的 k (这个k的范围在 i 到 j之间),而后面为什么要加一个从i到j的概率呢?因为挑出了k后,它作root,每个点的查找长度都增加了1。当然,也有更严格
的推导,可以参考下:
3)有了状态转移方程,就可以画个矩阵看看初始条件,以及每个C[i , j]依赖那些值(填表顺序)。
初始条件有:C[i , i] = Pi,C[i , i-1] = 0
试探一下一个C[i , j]是怎么来的,就可以看出,应该沿对角线来填。
注意状态转移方程里当 k = i 或者 k = j 时,C[i , i - 1] 或者 C[j+1 , j]是没有定义的,在编程中只需要特殊处理下就行:对于这种没有定义的取0,其他的取矩阵中的值。
最后一点,至于具体的实现,tmd书上总喜欢画一个不是从0开始的表,有时候甚至还横坐标从0开始,纵坐标从1开始,虽说
是为了填矩阵的方便,但看起来很狗。我一般n规模的问题,就开n * n的矩阵,下表从0到n-1,对超出边界的做一些特殊处
理就行了,就像上面的C[i , i-1]。看看书上的表(理解意思,具体实现我开的矩阵不一样,下标控制不一样):
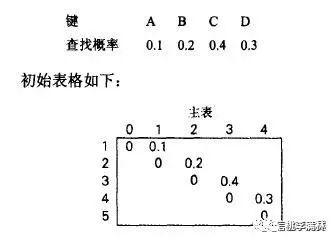
它这样来画表其实就是为了解决C[i , i-1]不在定义范围内,为了能直接从矩阵中取值才这么做的。
-------------------------------------------------------------------------------------------------------------
上面就构造出了最优二叉查找树的最优代价的动态规划过程,利用上述状态转移方程可以填出所有的C[i , j]。
还有一个问题,怎么去不仅仅得到C[i , j]这个代价,更要知道对应于这个代价的二叉树的形状?
仍然是构造一个矩阵 A[0...n-1,0...n-1] 来记录动态规划的过程,每次选出一个 k 作root时,就把 k 记录下来,即用A[i , j] = k 表示从 i 到 j 的最优二叉查找树的root是 k。(它还蕴含从 i 到 k - 1是左子树,k+1到 j 是右子树,注意我们给定的从0到n-1顶点是一个中序序列!)
初始值 A[i , i] = i,表示只有自己的最优二叉查找树的root就是它自己。最后将得到一个矩阵A。它表达了二叉查找树的形状,当然,还得根据A的含义,从A中获取从 i 到 j的最优二叉查找树的形状。
可以有下列算法,从A中输出从 i 到 j 的最优二叉查找树的形状(输出它的前序序列,因为中序序列是已知的):
已知前序序列和中序序列,一个二叉树的形状就确定了:
也是用递归(最优子结构)
-------------------------------------------------------------------------------------------------------------
实现:
public class test {
/**
* @param args
*/
public static void main(String[] args) {
// TODO Auto-generated method stub
float[] P = {(float) 0.1,(float) 0.2,(float) 0.4,(float) 0.3};
//若返回值是最小代价,测试最小代价是否正确
//System.out.println("输出最优二叉排序树的最小代价: ");
//float result = OptBST(P);
//System.out.println(result);
//若返回值是表达最优二叉排序树形状的矩阵,测试矩阵是否正确
System.out.println("输出表达最优二叉排序树形状的矩阵: ");
int[][] R = OptBST(P);
for(int i = 0;i < R.length;i++)
{
for(int j = 0;j < R.length;j++)
System.out.print(R[i][j] + " ");
System.out.println();
}
}
public static int[][] OptBST(float[] P){
//接受一个中序序列的点的查找概率数组,返回最优的二叉查找树的代价(注意P中的概率按顺序对应于点的中序序列)
int n = P.length; //结点个数
float[][] result = new float[n][n];
int[][] R = new int[n][n]; //表达二叉查找树形状的矩阵
for(int i = 0;i < n;i++)
{
result[i][i] = P[i]; //填充主对角线C[i,i] = P[i]
R[i][i] = i; //R[i][j]表示若只构造从i到j的树,那么root是R[i][j]
}
for(int d = 1;d <= n - 1;d++) //共n-1条对角线需要填充
{
for(int i = 0;i <= n - d - 1;i++) //横坐标的范围与对角线编号d的关系
{
int j = i + d; //一旦横坐标确定后,纵坐标可以用横坐标与对角线编号表示出来
float min = 1000000;
int root = 0;
for(int k = i;k <= j;k++)
{
float C1 = 0,C2 = 0; //用C1,C2表示result[i,k-1]和result[k+1,j]
if(k > i)
C1 = result[i][k - 1];
if(k < j)
C2 = result[k + 1][j];
if(C1 + C2 < min)
{
min = C1 + C2;
root = k;
}
}
R[i][j] = root; //R[i][j]的值代表从i到j的最优二叉查找树的根
float sum = 0;
for(int s = i;s <= j;s++)
//sum = sum + P[i];
sum = sum + P[s];
result[i][j] = sum + min;
}
}
//return result[0][n-1]; //返回C[1,n],最小代价
return R; //返回表达最优二叉排序树形状的矩阵
}
}
最优代价的矩阵和表达形状的矩阵在一起求的,需要哪个就返回哪个值,见代码。
很容易看出时间复杂度是 n^3(k的选择需要一个循环) 的,空间复杂度是 n^2的。
运行结果(返回表达二叉查找树形状的矩阵R):
输出表达最优二叉排序树形状的矩阵:
0 1 2 2
0 1 2 2
0 0 2 2
0 0 0 3
以上是关于二叉搜索树和最优二叉搜索树的时间复杂度各是多少?的主要内容,如果未能解决你的问题,请参考以下文章