STM32F407加FPGA用FSMC总线怎么连接
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了STM32F407加FPGA用FSMC总线怎么连接相关的知识,希望对你有一定的参考价值。
参考技术A STM32F407的FSMC总线连接FPGA,FPGA内部设置为FSMC与SRAM直接连接。 参考技术B 硬件么?硬件的话fpga的IO比较自由,只需按stm的IO进行分配就好,
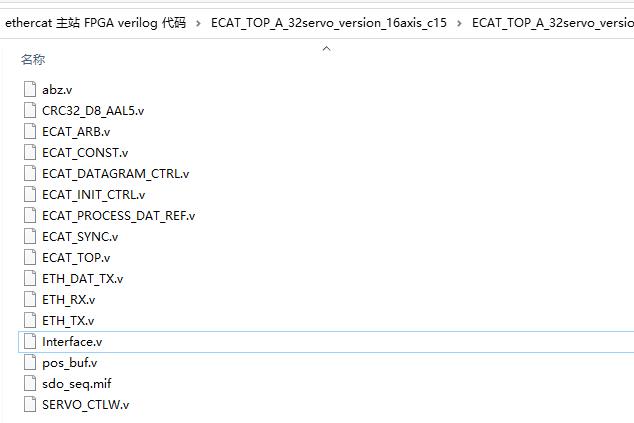
基于 FPGA verilog 的 Ethercat 主站工程代码

EtherCAT 总线 demo 板介绍
一、测试架构介绍
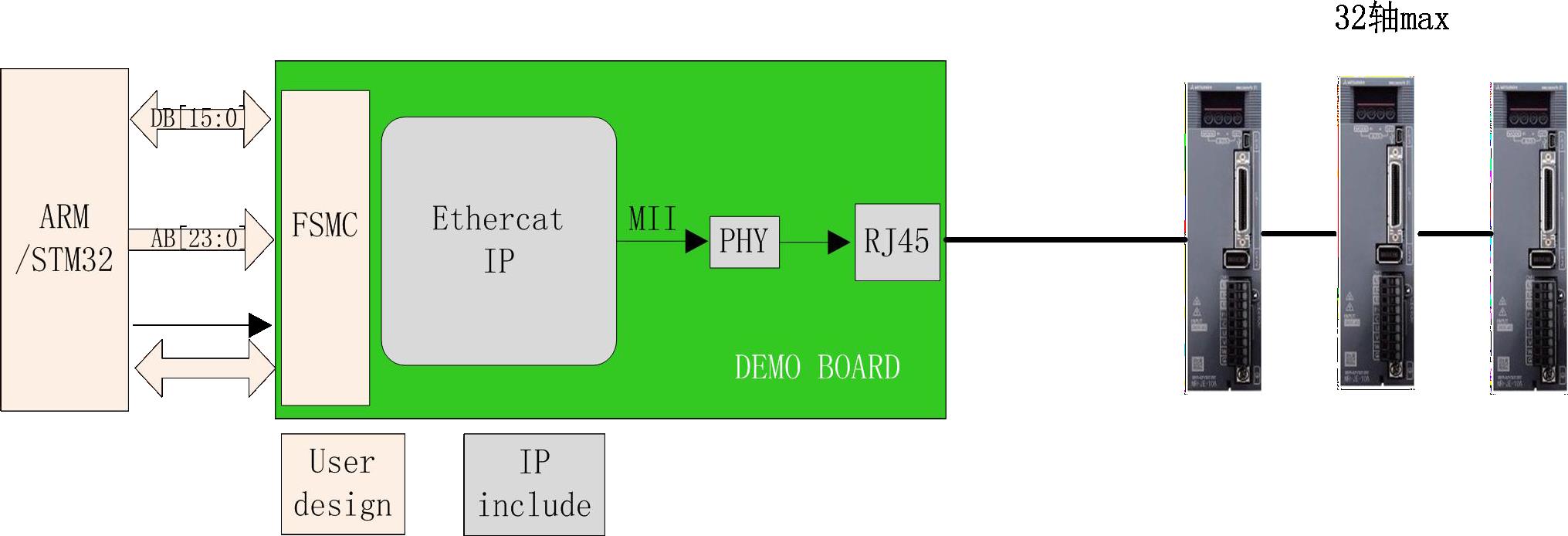
- 总线部分包括 EtherCAT 协议、Canopen 协议、1588 同步协议,全部在 FPGA上实现,纯 Verilog 实现,无软核,时间精准。
- FPGA 挂百兆网口串接伺服,布线简单。
- 支持驱动 1-32 轴,自动侦测。
- CPU 和FPGA 的接口,根据 CPU 的不同而不同,常用的如 FSMC 接口、GPMC 接口、PCI/PCIE 接口等等。
- 运动控制部分用户可以选择在 STM32、ARM、X86 等 CPU 上实现 (此部分代码 demo 板不包含)
- DEMO 板具备参数固定自动运行模式,可测试总线的通讯和驱动器侦测运行正常。
- 图中 User design 部分为用户自行设计。
- 图中 IP include 部分为 demo 或 IP 提供的。
二、具体性能参数
1、循环周期和抖动
- 循环周期支持 31.25us、62.5us、125us、250us、500us、1ms、2ms 等。
- 主站在循环周期 2ms 时抖动为 50us,循环周期越短,抖动越小,从站抖动10ns。
2、支持轴数与FPGA 资源消耗量
- 支持 1-32 轴,消耗资源 12K 逻辑 Slice 左右,如用户有自己的 IP 或功能模块需要集成,则建议采用 30K 资源的 FPGA,这样才有足够冗余以备所需。某些运动控制器需要添加手轮,IO 开关量,其他用户自定义功能。
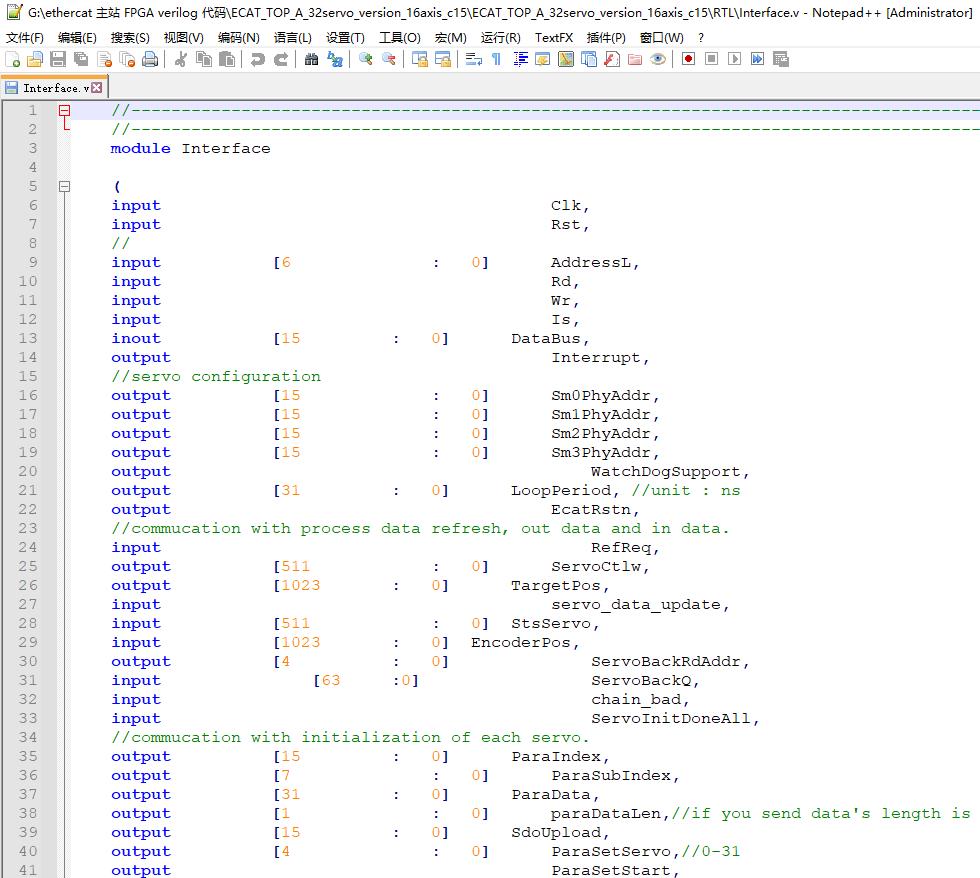
三、用户接口
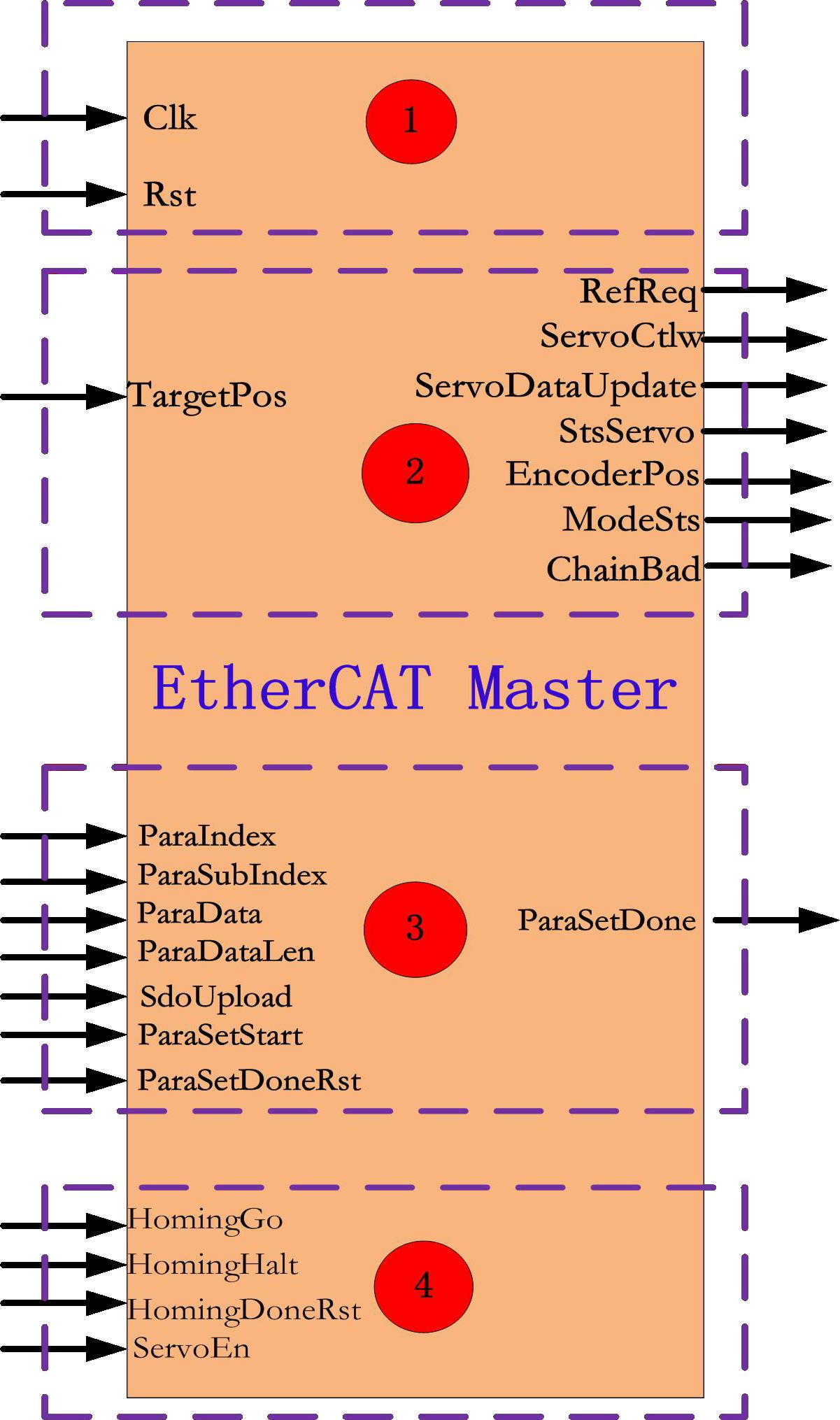
该 DEMO 中接口分为 4 个部分:系统部分,过程数据部分,伺服参数配置部分,回零部分,具备与外部处理器交互的接口为过程数据部分,伺服参数配置部分,具体信号如下图所示。
| 标号 | 信号部分 | 功能 |
| 1 | 系统部分 | 时钟域复位信号,用于复位 Ethercat master 主
站 |
| 2 | 过程数据部分 | 用于处理器与驱动器之间的指令和状态交互,包
括位置,状态及其对应的有效信号 |
| 3 | 伺服参数配置部分 | 用于处理器配置主站参数,包括数据的地
址,数据的长度,数据以及设置启动和复位信号 |
| 4 | 测试接口 | 测试接口包括回零的启动和复位等信号,用户无
需使用 |
注:自测试模式为以上端口固定数字量自运行模式,驱动器将持续运转。
ECAT运动控制器ARM软件设计
一、ARM向FPGA发送目标位置
1、对应的操作地址
`define CUR_POS_SERVO 1
`define TARGET_CUR_POSL 2
`define TARGET_CUR_POSH 3
2、操作步骤
- 下发每个轴的位置时,先通过写地址1,告知FPGA接下来要发送目标位置的伺服;
- 再通过写地址2向FPGA写目标位置的低16bit;
- 再通过写地址3向FPGA写目标位置的高16bit。
3、注意
通过地址1,向FPGA写接下来要操作的伺服,写0表示第一个伺服,写31表示第32个伺服,以此类推。
在读写操作完成之前,不要改变指定的伺服。也就是说指定伺服+读写数据,是一整套。
二、ARM向FPGA读取当前位置
1、对应的操作地址,与目标位置共享一套地址
`define CUR_POS_SERVO 1
`define TARGET_CUR_POSL 2
`define TARGET_CUR_POSH 3
2、操作步骤
- 下发每个轴的位置时,先通过写地址1,告知FPGA接下来要读取当前位置的伺服;
- 再通过读地址“2”向FPGA读取当前位置的低16bit;
- 再通过读地址“3”向FPGA读取当前位置的高16bit。
三、ARM向FPGA发送控制字
1、对应的操作地址
`define CUR_POS_SERVO 1
`define STS_SERVO 4
2、操作步骤
- 下发每个轴的控制字时,先通过写地址1,告知FPGA接下来要发送控制字的伺服;
- 再通过写地址4向FPGA写伺服的控制字;FPGA会根据第一步的伺服去对应该控制字是给哪个伺服的。
当ARM通过地址58检测到所有伺服进入OP状态后,可以通过控制字来控制各个伺服进入伺服使能状态,具体的操作流程为:顺序发送控制字6、7、15。每发送一个控制字,伺服对应的状态字就会发生变化。通过检测状态字的变化来确定发送下一个控制字。
回零的控制字为15到31,回零完成后,控制字要返回15。
四、ARM向FPGA读取状态字
1、对应的操作地址
`define CUR_POS_SERVO 1
`define STS_SERVO 4
2、操作步骤
- 下发每个轴的控制字时,先通过写地址1,告知FPGA接下来要读取控制字的伺服;
- 再通过读地址4向FPGA读取对应伺服的控制字。
五、ARM读取轴的位置缓存数据的个数
1、对应的操作地址
`define CUR_POS_SERVO 1
`define ECAT_POS_FIFO_CNT 65
2、操作步骤
FPGA为每个轴的目标位置都对应设计了一个32深度的缓存,ARM根据缓存和需要将目标位置发送到这个缓存,供FPGA的ECAT刷新。
- 先通过写地址1,告知FPGA接下来要读取数据个数的伺服;
- 再通过读地址65来读取对应伺服的轴数据缓存中数据个数。
六、ARM在启动FPGA的ECAT之前需要配置的内容
1、配置FPGA内容的相关写地址
`define SM0_PHYADDR 49
`define SM1_PHYADDR 50
`define SM2_PHYADDR 51
`define SM3_PHYADDR 52
`define WATCHDOG_SUPPORT 53
`define LOOP_PERIOD_H 55
`define LOOP_PERIOD_L 56
2、具体含义
- SM0_PHYADDR,SM0的地址,16bit,xml文件中的高低8bit交换后,下发给FPGA。
- SM1_PHYADDR,SM1的地址,16bit,xml文件中的高低8bit交换后,下发给FPGA。
- SM2_PHYADDR,SM2的地址,16bit,xml文件中的高低8bit交换后,下发给FPGA。
- SM3_PHYADDR,SM3的地址,16bit,xml文件中的高低8bit交换后,下发给FPGA。
- WATCHDOG_SUPPORT,伺服是否支持看门狗,写1表示支持,写0表示不支持,从测试的5家伺服来看,除久同外,其他家均支持。
- LOOP_PERIOD_H ,为循环周期的高16bit。
- LOOP_PERIOD_L ,为循环周期的低16bit。
七、控制和状态寄存器
1、相关操作地址
`define ECAT_RSTN 57
`define SERVO_INIT_DONE_ALL 58
2、具体含义
- ECAT_RSTN ,ARM向该地址写1,启动FPGA的ECAT运行。
- SERVO_INIT_DONE_ALL,ARM通过该地址读取所有伺服是否初始化完毕,1表示完毕。
八、伺服参数配置功能寄存器
1、相关操作地址
`define PARA_INDEX 77
`define PARA_SUB_INDEX 78
`define PARA_DATA_H 79
`define PARA_DATA_L 80
`define PARA_DATA_LEN 81
`define PARA_DATA_UpLOAD 82
`define PARA_DATA_UpLOAD_H 83
`define PARA_DATA_UpLOAD_L 84
`define PARAM_SET 85
`define PARAM_SET_RST 86
`define PARAM_SET_SERVO 87
九、伺服回零功能
多个伺服同时回零的流程:
通过参数设置端口,依次将各个伺服设置成模式6,再依次发送控制字31,再依次去读取状态字,如果读到某个轴的状态字是回零完成,就将该轴的控制字写回15,并然后通过参数设置接口将其模式设置为8。
十、伺服IO读取与写入
在启动ECAT之前,通过如下两个地址,分别配置伺服IO的地址:
`define M2S_IO_PHYADDR 47 //master output
`define S2M_IO_PHYADDR 48 //master input
地址47为运动控制器输出到伺服的IO指令;
地址48为运动控制器从伺服获取的IO状态。
启动ECAT后,通过地址99来输出IO指令到伺服,或者从伺服获取IO状态。
`define SERVO_IO 99
同理,通过地址4来指定所要操作的伺服。
初定为8输入8输出,16位数据线的低8bit有效。
十一、其他标志
轴数据缓存的空满标志、ECAT断线等等标志
以上是关于STM32F407加FPGA用FSMC总线怎么连接的主要内容,如果未能解决你的问题,请参考以下文章