ROS:语音识别与合成,让机器人会说话
Posted ImportSUC
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS:语音识别与合成,让机器人会说话相关的知识,希望对你有一定的参考价值。
Ubuntu14.04
网上很多资料说在/etc/rc.local中添加脚本,实验之后完全没用。可能是系统版本不对。
解决:
Ubuntu14.04 开机项命令: gnome-session-properties
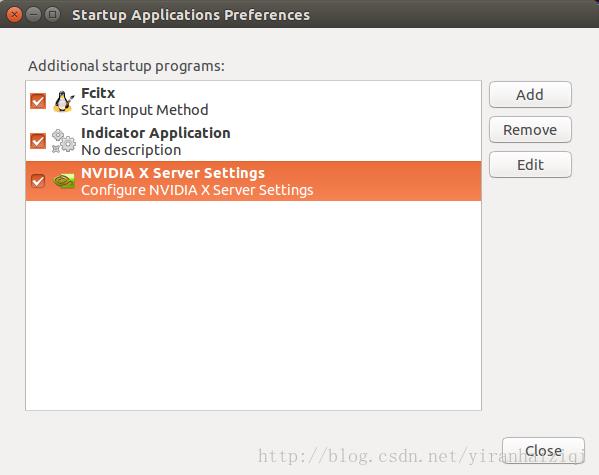
点击”add”
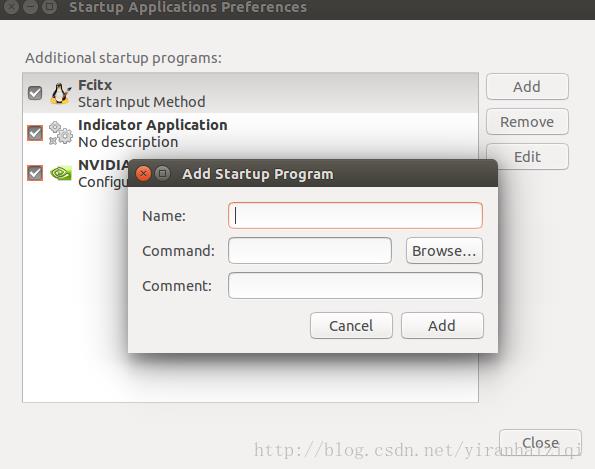
name : 名字
command : 命令,eg:gnome-terminal -x your_command.sh
注意:sh文件的权限,必须是可运行的, 路径为绝对路径。
sudo chmod +x your_command.shcomment :注释

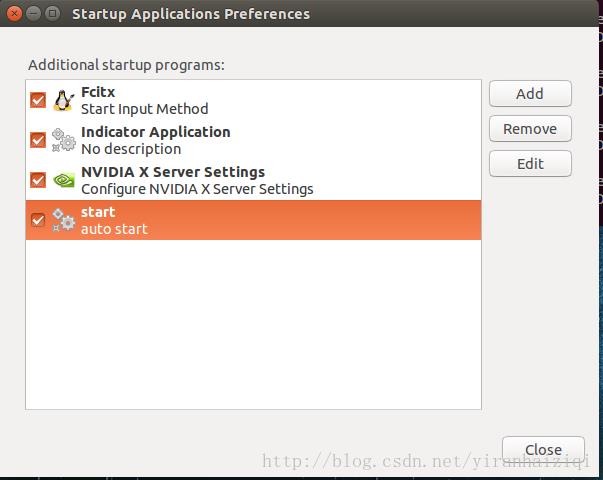
退出,重启!
脚本文件 start.sh
#! /bin/bash
source /opt/ros/indigo/setup.sh
source /home/server/catkin_ws/devel/setup.bash
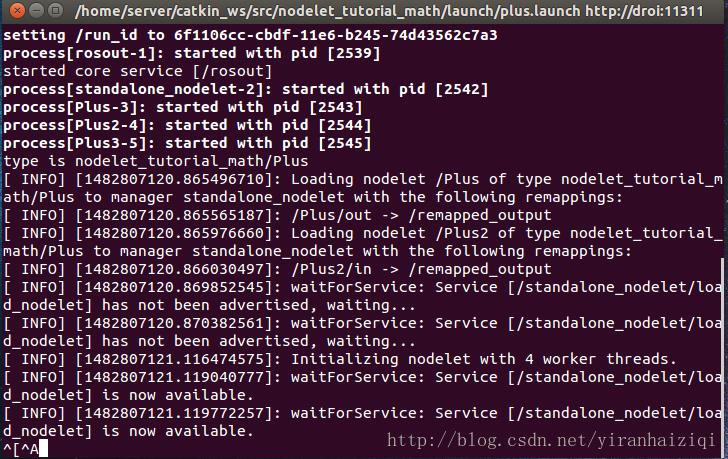
roslaunch /home/server/catkin_ws/src/nodelet_tutorial_math/launch/plus.launch开机后结果,已经自动运行了。
firefly
最终的产品我们不可能用一台电脑作为处理器,所以我们要有开发板,我们使用的是firefly rk3288.系统是Ubuntu14.04.因为系统是同事搞得,具体细节不清楚。在firefly中,没有gnome-session-properties这条命令,也就是说之前的方法不能用。这个时候robot_upstart 上场了。
http://docs.ros.org/jade/api/robot_upstart/html/index.html#
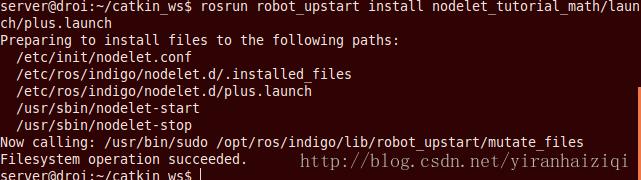
安装:sudo apt-get install ros-indigo-robot-upstart
install 命令:要启动的launch文件,默认的名称为”myrobot”,也可以使用–job 指定工作名称,默认是工程名(下划线之前的部分)。
start 命令:
$ sudo service nodelet start
关机重启之后,这时,我们的终端不会自动启动,但是ros 节点已经启动了,打开终端,验证一下执行
$rosnode list
$rostopic list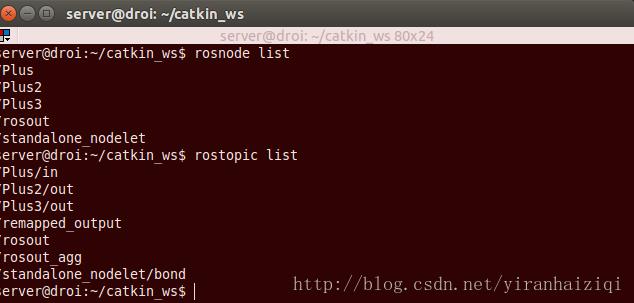
可以看到,ros节点已经在运行了。
stop命令:
sudo service nodelet stopuninstall命令:
rosrun robot_upstart uninstall nodelet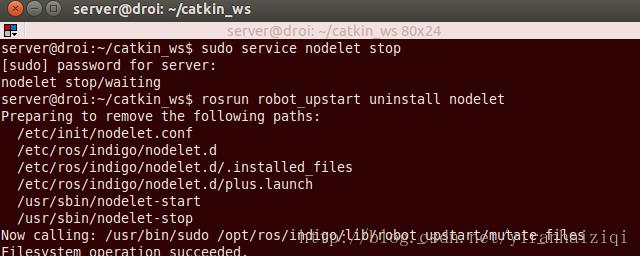
这样自启动就会取消了。
遇到的大坑
我们的板子需要接很多设备,比如底座,摄像头,arduino等等。板子上的usb转串口 接口明显不够用。另外开机时串口的识别,设备的识别等很不稳定。所以让这些设备在板子开机时被稳定的识别到是最重要的。目前没有找到好的解决办法,以后解决了再更新。
2016 -12-30更新
之前的关于设备接口和串口识别不到的问题解决了,说一下解决思路。可以新建一个node,使用launch启动,将这个launch设为自启动。这样,上电开机时,这个node就会运行。在这个node中,延时一段时间,调用c++的system函数执行去linux命令,启动包含摄像头等其他设备的launch。
system("roslaunch pkg xxx.launch")总之,等系统识别完设备接口之后,再去启动我们的launch,就能保证不会出现找不到串口或设备的问题了。
以上是关于ROS:语音识别与合成,让机器人会说话的主要内容,如果未能解决你的问题,请参考以下文章