基于数据挖掘的图像检索-随笔
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了基于数据挖掘的图像检索-随笔相关的知识,希望对你有一定的参考价值。
1)图像检索
该算法提取数据库中图像的底层特征,将图像和提取出来的底层特征作为训练数据,对类区域进行半监督学习,实现图像和类别的语义关联。
算法1 图像类区域的半监督学习
输入 图像数据集。
输出 图像的特征库和类区域。
第一步: 读取图像集的图像,存入图像库。对图像集中的图像进行预处理,提取图像的底层特征,存入特征库。
第二步: 通过图像集的底层特征计算每个图像类的类区域中心。
第三步: 根据该类中心到该类图像的距离判断图像类区域。用户检索图像可以用示例图像检索,也可以用关键词来进行检索,检索过程如图1所示。关键词的检索方法将用户输入的关键词与知识库进行匹配,找到检索的图像类别标记,返回该类区域中的图像,并按与类区域中心距离升序排列输出。
算法2 图像检索
输入 新的查询示例图像Q。
输出 图像Q 的相似图像集合与类标签。
第一步: 对示例图像Q 进行预处理,进行感兴趣区域的划分,提取图像的72 维颜色特征向量以及28 维纹理特征。
第二步: 计算图像特征和特征空间中图像和各类中心的相似度Dis( i,j ) 。按相似度Dis( i,j ) 的升序排列输出相似图像,并判断查询图像Q 的类标签。当Q 满足多个类区域时,按查询返回图像的类别比例最高选择图像Q 的类标签。
第三步: 用户反馈查询结果是否满意,满意则将图像Q 存入图像库,其特征存入特征库,加入图像类集合,并且重新计算该类别的区域中心。
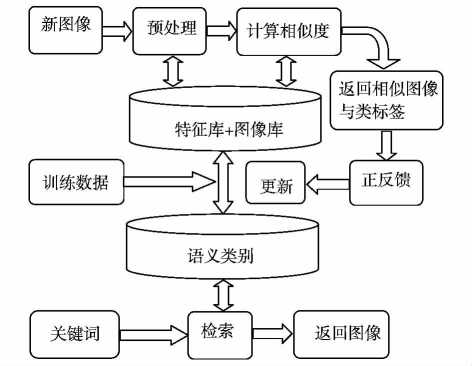
图1 图像检索系统
2)多源颜色迁移
这里,我们采取的是多源图像对模板图像进行颜色迁移,多源图像,用![]() 表示,K是源图像的全部数量。M是形状图像的分割区域数量。它保证任一源图像应该为至少一个目标区域提供参考颜色。区域匹配的目的在于为任一目标区域从多源图像中挑选最匹配的参考颜色,包括下面步骤:
表示,K是源图像的全部数量。M是形状图像的分割区域数量。它保证任一源图像应该为至少一个目标区域提供参考颜色。区域匹配的目的在于为任一目标区域从多源图像中挑选最匹配的参考颜色,包括下面步骤:
① 亮度重映射
在区域匹配过程中,颜色图像和形状图像各像素点的亮度分布差别很大的情况往往会对匹配结果造成较大的影响,因此在匹配之前,我们先对每张源图像 的
的 通道实施亮度重映射,公式如下:
通道实施亮度重映射,公式如下:
 (3-1)
(3-1)
这里, 和
和 是源图像
是源图像 中
中 通道的均值和标准差;
通道的均值和标准差; 和
和  是目标图像
是目标图像 通道的均值和方差。
通道的均值和方差。 是
是 新的匹配亮度。
新的匹配亮度。
② 挑选最匹配的区域对
根据上述K均值算法将颜色图像和形状图像都划分为M个颜色区域。通过计算颜色图像区域 ,
,  的均值矢量
的均值矢量 和形状图像区域
和形状图像区域 ,
, 的颜色均值矢量
的颜色均值矢量 之间的欧式距离作为依据进行判断,距离最小的两个区域即为最佳匹配区域对。颜色图像和形状图像区域的颜色均值之间的距离计算公式如下:
之间的欧式距离作为依据进行判断,距离最小的两个区域即为最佳匹配区域对。颜色图像和形状图像区域的颜色均值之间的距离计算公式如下:
 (3-2)
(3-2)
通过方程式(3-3),我们可以决定最匹配的区域对 ,在
,在 的k个候选区之间
的k个候选区之间 是相似的源区域,描述如下:
是相似的源区域,描述如下:
 (3-3)
(3-3)
通过收集 中的像素,
中的像素, ,我们能得到一个复合的源图像S。
,我们能得到一个复合的源图像S。
③ 结果组合
区域匹配之后,就要将每个颜色图像区域的颜色迁移到对应匹配的形状图像区域中。我们计算彩色通道 的变换值:
的变换值:
 (3-4)
(3-4)
 (3-5)
(3-5)
这里, 通道的统计用一个上标
通道的统计用一个上标 来表示,
来表示, 通道用一个上标
通道用一个上标 表示。
表示。 ,
, 分别是是目标图像
分别是是目标图像 ,
, 通道的像素点;
通道的像素点; ,
, 分别是目标图像第j块区域的
分别是目标图像第j块区域的 ,
, 的均值;同理,
的均值;同理, ,
, 分别是颜色图像第i块区域的
分别是颜色图像第i块区域的 ,
, 的均值;
的均值; ,
, 分别是目标图像第j块区域的
分别是目标图像第j块区域的 ,
, 通道的标准方差;
通道的标准方差; ,
, 分别是目标图像第j块区域的
分别是目标图像第j块区域的 ,
, 通道的标准方差。
通道的标准方差。
我们分别在目标图像和组合的源图像上使用所有像素的均值和标准方差。计算 通道的转换值如下:
通道的转换值如下:
 (3-6)
(3-6)
即可将各区域颜色迁移结果图像合成为完整的图像。最后,还要将合成的图像从  转换回RGB颜色空间。
转换回RGB颜色空间。
当对一幅灰度图像上色时,我们仅有可使用的亮度通道。因此对于灰度目标图像的像素,我们在最后的颜色迁移之前,首先把 通道的相同分布分配给缺席的
通道的相同分布分配给缺席的 ,
, 通道。
通道。
以上是关于基于数据挖掘的图像检索-随笔的主要内容,如果未能解决你的问题,请参考以下文章