[OpenCV] Samples 04: contours2
Posted 机器学习水很深
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了[OpenCV] Samples 04: contours2相关的知识,希望对你有一定的参考价值。
要先变为二值图像:cvThreshold
提取轮廓:cvFindContours
参数描述:
hiararchy:参数和轮廓个数相同。
每个轮廓contours[ i ] 对应4个hierarchy元素的索引编号,即:
-
- hierarchy[ i ][ 0 ] 后一个轮廓
- hierarchy[ i ][ 1 ] 前一个轮廓
- hierarchy[ i ][ 2 ] 父轮廓
- hierarchy[ i ][ 3 ] 内嵌轮廓
如果没有对应项,该值设置为负数。
mode:表示轮廓的检索模式
CV_RETR_EXTERNAL 表示只检测外轮廓
CV_RETR_LIST 检测的轮廓不建立等级关系
CV_RETR_CCOMP 建立两个等级的轮廓,上面的一层为外边界,里面的一层为内孔的边界信息。如果内孔内还有一个连通物体,这个物体的边界也在顶层。
CV_RETR_TREE 建立一个等级树结构的轮廓。
method:为轮廓的近似办法
CV_CHAIN_APPROX_NONE 存储所有的轮廓点,相邻的两个点的像素位置差不超过1,即max(abs(x1-x2),abs(y2-y1))==1
CV_CHAIN_APPROX_SIMPLE 压缩水平方向,垂直方向,对角线方向的元素,只保留该方向的终点坐标,例如一个矩形轮廓只需4个点来保存轮廓信息
CV_CHAIN_APPROX_TC89_L1,CV_CHAIN_APPROX_TC89_KCOS 使用teh-Chinl chain 近似算法
offset:表示代表轮廓点的偏移量,可以设置为任意值。对ROI图像中找出的轮廓,并要在整个图像中进行分析时,这个参数还是很有用的。
findContours 后会对输入的二值图像改变,最好需创建新MAT来存放;
findContours 后的轮廓信息contours可能过于复杂不平滑,可以用 approxPolyDP() 对该多边形曲线做适当近似。
contourArea() 函数可以得到当前轮廓包含区域的大小,方便轮廓的筛选。
findContours经常与 drawContours() 配合使用,用来将轮廓绘制出来。
- 第一个参数,image表示目标图像
- 第二个参数,contours表示输入的轮廓组,每一组轮廓由点vector构成
- 第三个参数,contourIdx指明画第几个轮廓,如果该参数为负值,则画全部轮廓
- 第四个参数,color为轮廓的颜色
- 第五个参数,thickness为轮廓的线宽,如果为负值或CV_FILLED表示填充轮廓内部
- 第六个参数,lineType为线型
- 第七个参数,为轮廓结构信息
- 第八个参数,为maxLevel
得到了复杂轮廓往往不适合特征的检测,这里再介绍一个点集凸包络的提取函数convexHull(),
- 输入参数,是contours组中的一个轮廓
- 返回,外凸包络的点集。
还可以得到轮廓的外包络矩形,使用函数 boundingRect(),
如果想得到旋转的外包络矩形,使用函数 minAreaRect(),返回值为RotatedRect;
也可以得到轮廓的外包络圆,对应的函数为 minEnclosingCircle();
想得到轮廓的外包络椭圆,对应的函数为 fitEllipse(),返回值也是RotatedRect,可以用ellipse函数画出对应的椭圆。
如果想根据多边形的轮廓信息 => 多边形的多阶矩,可以使用 类moments,这个类可以得到多边形和光栅形状的3阶以内的所有矩,
类内有变量m00,m10,m01,m20,m11,m02,m30,m21,m12,m03,
比如多边形的质心为 x = m10 / m00,y = m01 / m00。
如果想获得一点与多边形封闭轮廓的信息,可以调用 pointPolygonTest(),这个函数返回值为该点距离轮廓最近边界的距离,为正值为在轮廓内部,负值为在轮廓外部,0表示在边界上。
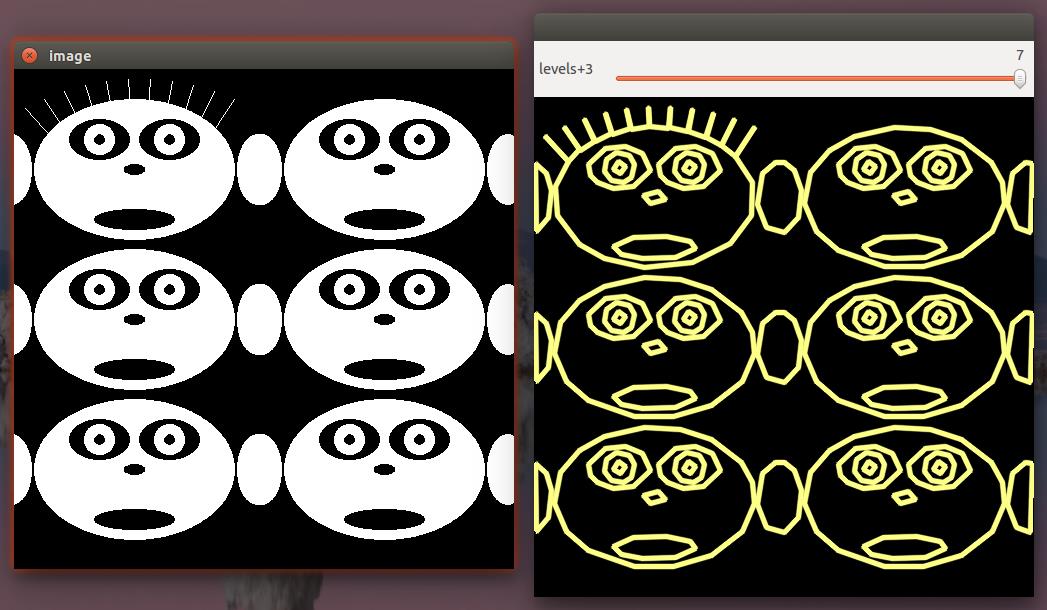
#include "opencv2/imgproc/imgproc.hpp" #include "opencv2/highgui/highgui.hpp" #include <math.h> #include <iostream> using namespace cv; using namespace std; static void help() { cout << "\\nThis program illustrates the use of findContours and drawContours\\n" << "The original image is put up along with the image of drawn contours\\n" << "Usage:\\n" << "./contours2\\n" << "\\nA trackbar is put up which controls the contour level from -3 to 3\\n" << endl; } const int w = 500; int levels = 3; vector<vector<Point> > contours; vector<Vec4i> hierarchy; static void on_trackbar(int, void*) { Mat cnt_img = Mat::zeros(w, w, CV_8UC3); int _levels = levels - 3; drawContours( cnt_img, contours, _levels <= 0 ? 3 : -1, Scalar(128,255,255), 3, LINE_AA, hierarchy, std::abs(_levels) ); imshow("contours", cnt_img); } int main( int argc, char** argv) { cv::CommandLineParser parser(argc, argv, "{help h||}"); if (parser.has("help")) { help(); return 0; } // Mat img = Mat::zeros(w, w, CV_8UC1); //Jeff --> we don\'t need to draw this by ourselves. //Draw 6 faces // for( int i = 0; i < 6; i++ ) // { // int dx = (i%2)*250 - 30; // int dy = (i/2)*150; // const Scalar white = Scalar(255); // const Scalar black = Scalar(0); // if( i == 0 ) // { // for( int j = 0; j <= 10; j++ ) // { // double angle = (j+5)*CV_PI/21; // line(img, Point(cvRound(dx+100+j*10-80*cos(angle)), // cvRound(dy+100-90*sin(angle))), // Point(cvRound(dx+100+j*10-30*cos(angle)), // cvRound(dy+100-30*sin(angle))), white, 1, 8, 0); // } // } // ellipse( img, Point(dx+150, dy+100), Size(100,70), 0, 0, 360, white, -1, 8, 0 ); // ellipse( img, Point(dx+115, dy+70), Size(30,20), 0, 0, 360, black, -1, 8, 0 ); // ellipse( img, Point(dx+185, dy+70), Size(30,20), 0, 0, 360, black, -1, 8, 0 ); // ellipse( img, Point(dx+115, dy+70), Size(15,15), 0, 0, 360, white, -1, 8, 0 ); // ellipse( img, Point(dx+185, dy+70), Size(15,15), 0, 0, 360, white, -1, 8, 0 ); // ellipse( img, Point(dx+115, dy+70), Size(5,5), 0, 0, 360, black, -1, 8, 0 ); // ellipse( img, Point(dx+185, dy+70), Size(5,5), 0, 0, 360, black, -1, 8, 0 ); // ellipse( img, Point(dx+150, dy+100), Size(10,5), 0, 0, 360, black, -1, 8, 0 ); // ellipse( img, Point(dx+150, dy+150), Size(40,10), 0, 0, 360, black, -1, 8, 0 ); // ellipse( img, Point(dx+27, dy+100), Size(20,35), 0, 0, 360, white, -1, 8, 0 ); // ellipse( img, Point(dx+273, dy+100), Size(20,35), 0, 0, 360, white, -1, 8, 0 ); // } Mat img = imread("/home/unsw/lolo.jpg"); Mat gray; cvtColor(img, gray, COLOR_RGB2GRAY ); Mat binary; threshold(gray, binary, 200,255,THRESH_BINARY); // (1) Pic One Show: show the faces namedWindow( "image", 1 ); imshow( "image", binary ); // (2) Pic Two Show //Extract the contours so that vector<vector<Point> > contours0; findContours( binary, contours0, hierarchy, RETR_TREE, CHAIN_APPROX_SIMPLE); contours.resize(contours0.size()); for( size_t k = 0; k < contours0.size(); k++ ) approxPolyDP(Mat(contours0[k]), contours[k], 3, true); // Jeff --> the same name to bind window and trackbar together. // qt qml to draw would be much better. // callback: on_trackbar() namedWindow( "contours", 1 ); createTrackbar( "levels+3", "contours", &levels, 7, on_trackbar ); on_trackbar(0,0); waitKey(); return 0; }
Reference: http://blog.csdn.net/felix86/article/details/38121959
采用cvFindContours提取轮廓,并过滤掉小面积轮廓,最后将轮廓保存。
1 static int getContoursByCplus(char* Imgname, double minarea, double whRatio) 2 { 3 cv::Mat src, dst, canny_output; 4 /// Load source image and convert it to gray 5 src = imread(Imgname, 0); 6 7 if (!src.data) 8 { 9 std::cout << "read data error!" << std::endl; 10 return -1; 11 } 12 blur(src, src, Size(3, 3)); 13 14 15 //the pram. for findContours, 16 vector<vector<Point> > contours; 17 vector<Vec4i> hierarchy; 18 19 /// Detect edges using canny 20 Canny(src, canny_output, 80, 255, 3); 21 /// Find contours 22 findContours(canny_output, contours, hierarchy, CV_RETR_TREE, CV_CHAIN_APPROX_SIMPLE, Point(0, 0)); 23 //CV_RETR_CCOMP, CV_CHAIN_APPROX_SIMPLE 24 25 double maxarea = 0; 26 int maxAreaIdx = 0; 27 28 for (int i = 0; i<contours.size(); i++) 29 { 30 31 double tmparea = fabs(contourArea(contours[i])); 32 if (tmparea>maxarea) 33 { 34 maxarea = tmparea; 35 maxAreaIdx = i; 36 continue; 37 } 38 39 if (tmparea < minarea) 40 { 41 // *** 删除面积小于设定值的轮廓 42 contours.erase(contours.begin() + i); 43 std::wcout << "delete a small area" << std::endl; 44 continue; 45 } 46 //计算轮廓的直径宽高 47 Rect aRect =boundingRect(contours[i]); 48 if ((aRect.width / aRect.height)<whRatio) 49 { 50 // *** 删除宽高比例小于设定值的轮廓 51 contours.erase(contours.begin() + i); 52 std::wcout << "delete a unnomalRatio area" << std::endl; 53 continue; 54 } 55 } 56 /// Draw contours,彩色轮廓 57 dst= Mat::zeros(canny_output.size(), CV_8UC3); 58 for (int i = 0; i< contours.size(); i++) 59 { 60 //随机颜色 61 Scalar color = Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255)); 62 drawContours(dst, contours, i, color, 2, 8, hierarchy, 0, Point()); 63 } 64 // Create Window 65 char* source_window = "countors"; 66 namedWindow(source_window, CV_WINDOW_NORMAL); 67 imshow(source_window, dst); 68 cv:; waitKey(0); 69 70 return 0; 71 }
以上是关于[OpenCV] Samples 04: contours2的主要内容,如果未能解决你的问题,请参考以下文章