ROS机器人程序设计(原书第2版)补充资料 (伍) 第五章 计算机视觉
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS机器人程序设计(原书第2版)补充资料 (伍) 第五章 计算机视觉相关的知识,希望对你有一定的参考价值。
ROS机器人程序设计(原书第2版)补充资料 (伍) 第五章 计算机视觉
书中,大部分出现hydro的地方,直接替换为indigo或jade或kinetic,即可在对应版本中使用。
计算机视觉这章分为两个部分,摄像头在Ubuntu中驱动并在ROS下使用,以及相关图像算法等。
补充阅读:http://blog.csdn.net/zhangrelay/article/details/50053653
第128-129页:
介绍本章要点。
第129-132页:
FireWire IEEE 1394摄像头。
补充阅读:http://wiki.ros.org/camera1394
第133-140页:
USB摄像头。
补充阅读:http://wiki.ros.org/usb_cam
其他摄像头说明:
Cameras-ROS支持摄像头
标定摄像头,分为单目和双目。
相关代码可到github下载源码研究。
第148-151页:
ROS图像管道。可以查看原始图像和标定图像的区别,标定误差等。
也可以用于图像处理,比如深度转激光,用于建图(SLAM)等,但精度通常比激光要差一些。
可以参考:http://wiki.ros.org/depthimage_to_laserscan
第152-153页:
ROS中有用的视觉功能包。如视觉里程计。
推荐Yong Liu Associate Profosser, IEEE member的主页,学习基本理论等。
http://www.csc.zju.edu.cn/yliu/
补充:
1 http://wiki.ros.org/vision_visp
3 http://wiki.ros.org/cob_people_detection
4 https://github.com/srv/viso2
5 https://github.com/srv/libfovis
第154-159页:
使用viso2实现视觉里程计(VO-SLAM-VINS)。
第160-161页:
使用RGBD深度摄像头实现视觉里程计(VO)。
补充:http://wiki.ros.org/rtabmap_ros
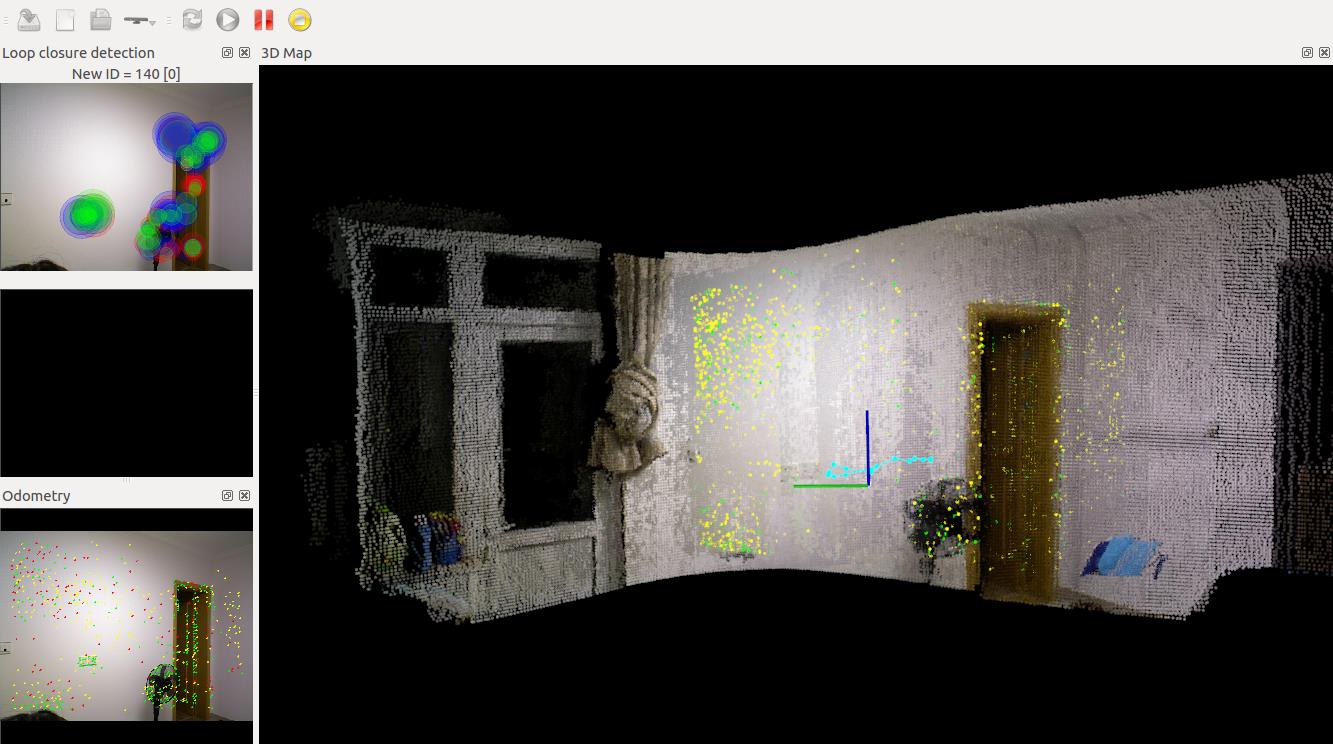
使用rtabmap进行视觉里程计算,并拼接3D图像,实现3D-SLAM。
第162页:
本章小结。
思考与巩固:
1 使用笔记本自带摄像头,在ROS下实现人脸识别。
2 学习并掌握视觉里程计的使用(VO)。
以上是关于ROS机器人程序设计(原书第2版)补充资料 (伍) 第五章 计算机视觉的主要内容,如果未能解决你的问题,请参考以下文章