TCP三次握手四次挥手及状态转换图
Posted wj_hubei
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了TCP三次握手四次挥手及状态转换图相关的知识,希望对你有一定的参考价值。
TCP/IP通信的三次握手如下:

TCP是主机对主机层的传输控制协议,提供可靠的连接服务:
位码即tcp标志位,有6种标示:SYN(synchronous建立联机) 、ACK(acknowledgement 确认) 、PSH(push传送)、 FIN(finish结束) 、RST(reset重置) 、URG(urgent紧急)、Sequence number(顺序号码) 、Acknowledge number(确认号码)。
三次握手:
第一次握手:客户端发送syn包(syn=x)的数据包到服务器,并进入SYN_SEND状态,等待服务器确认;
第二次握手:服务器收到syn包,必须确认客户的SYN(ack=x+1),同时自己也发送一个SYN包(syn=y),即SYN+ACK包,此时服务器进入SYN_RECV状态;
第三次握手:客户端收到服务器的SYN+ACK包,向服务器发送确认包ACK(ack=y+1),此包发送完毕,客户端和服务器进入ESTABLISHED状态,完成三次握手。
握手过程中传送的包里不包含数据,三次握手完毕后,客户端与服务器才正式开始传送数据。理想状态下,TCP连接一旦建立,在通信双方中的任何一方主动关闭连接之前,TCP连接都将被一直保持下去。
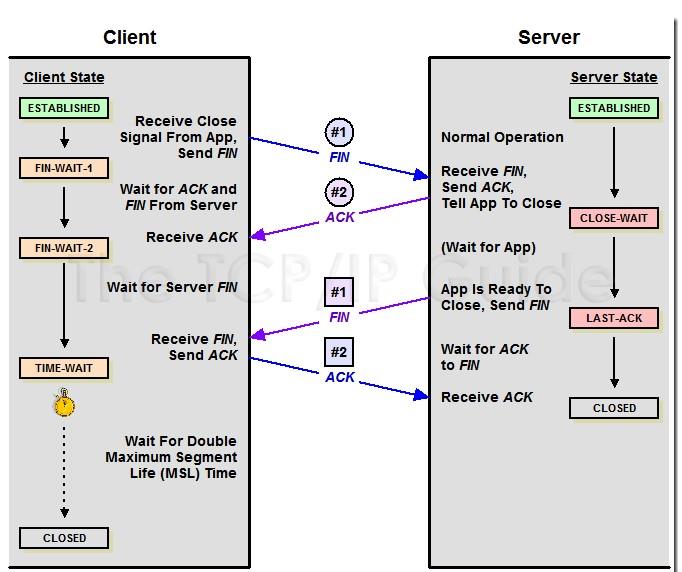
四次握手:
第一次挥手:主动关闭方发送一个FIN,用来关闭主动方到被动关闭方的数据传送,也就是主动关闭方告诉被动关闭方:我已经不会再给你发数据了(当然,在fin包之前发送出去的数据,如果没有收到对应的ack确认报文,主动关闭方依然会重发这些数据),但是,此时主动关闭方还可以接受数据。
第二次挥手:被动关闭方收到FIN包后,发送一个ACK给对方,确认序号为收到序号+1(与SYN相同,一个FIN占用一个序号)。
第三次挥手:被动关闭方发送一个FIN,用来关闭被动关闭方到主动关闭方的数据传送,也就是告诉主动关闭方,我的数据也发送完了,不会再给你发数据了。
第四次挥手:主动关闭方收到FIN后,发送一个ACK给被动关闭方,确认序号为收到序号+1,至此,完成四次挥手。
TCP状态转换图
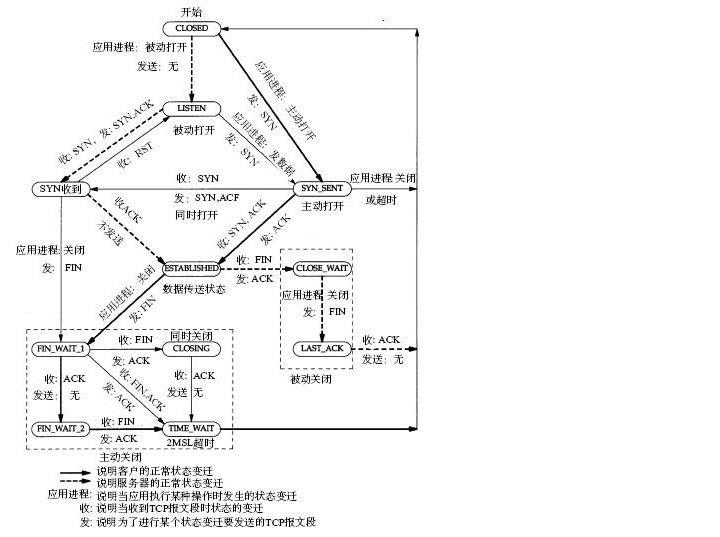
CLOSED: 这个没什么好说的了,表示初始状态。
LISTEN(服务器): 这个也是非常容易理解的一个状态,表示服务器端的某个SOCKET处于监听状态,可以接受连接了。
YN_RCVD(服务器): 这个状态表示接受到了SYN报文,在正常情况下,这个状态是服务器端的SOCKET在建立TCP连接时的三次握手会话过程中的一个中间状态,很短暂,基本上用netstat你是很难看到这种状态的,除非你特意写了一个客户端测试程序,故意将三次TCP握手过程中最后一个ACK报文不予发送。因此这种状态时,当收到客户端的ACK报文后,它会进入到ESTABLISHED状态。
SYN_SENT: 这个状态与SYN_RCVD遥想呼应,当客户端SOCKET执行CONNECT连接时,它首先发送SYN报文,因此也随即它会进入到了SYN_SENT状态,并等待服务端的发送三次握手中的第2个报文。SYN_SENT状态表示客户端已发送SYN报文。
ESTABLISHED:这个容易理解了,表示连接已经建立了。
FIN_WAIT_1: 这个状态要好好解释一下,其实FIN_WAIT_1和FIN_WAIT_2状态的真正含义都是表示等待对方的FIN报文。而这两种状态的区别是:FIN_WAIT_1状态实际上是当SOCKET在ESTABLISHED状态时,它想主动关闭连接,向对方发送了FIN报文,此时该SOCKET即进入到FIN_WAIT_1状态。而当对方回应ACK报文后,则进入到FIN_WAIT_2状态,当然在实际的正常情况下,无论对方何种情况下,都应该马上回应ACK报文,所以FIN_WAIT_1状态一般是比较难见到的,而FIN_WAIT_2状态还有时常常可以用netstat看到。
FIN_WAIT_2:上面已经详细解释了这种状态,实际上FIN_WAIT_2状态下的SOCKET,表示半连接,也即有一方要求close连接,但另外还告诉对方,我暂时还有点数据需要传送给你,稍后再关闭连接。
TIME_WAIT: 表示收到了对方的FIN报文,并发送出了ACK报文,就等2MSL后即可回到CLOSED可用状态了。如果FIN_WAIT_1状态下,收到了对方同时带FIN标志和ACK标志的报文时,可以直接进入到TIME_WAIT状态,而无须经过FIN_WAIT_2状态。
注:MSL(最大分段生存期)指明TCP报文在Internet上最长生存时间,每个具体的TCP实现都必须选择一个确定的MSL值.RFC 1122建议是2分钟,但BSD传统实现采用了30秒.TIME_WAIT 状态最大保持时间是2 * MSL,也就是1-4分钟.
结论:在TIME_WAIT下等待2MSL,只是为了尽最大努力保证四次握手正常关闭。确保老的报文段在网络中消失,不会影响新建立的连接.
CLOSING: 这种状态比较特殊,实际情况中应该是很少见,属于一种比较罕见的例外状态。正常情况下,当你发送FIN报文后,按理来说是应该先收到(或同时收到)对方的ACK报文,再收到对方的FIN报文。但是CLOSING状态表示你发送FIN报文后,并没有收到对方的ACK报文,反而却也收到了对方的FIN报文。什么情况下会出现此种情况呢?其实细想一下,也不难得出结论:那就是如果双方几乎在同时close一个SOCKET的话,那么就出现了双方同时发送FIN报文的情况,也即会出现CLOSING状态,表示双方都正在关闭SOCKET连接。
CLOSE_WAIT: 这种状态的含义其实是表示在等待关闭。怎么理解呢?当对方close一个SOCKET后发送FIN报文给自己,你系统毫无疑问地会回应一个ACK报文给对方,此时则进入到CLOSE_WAIT状态。接下来呢,实际上你真正需要考虑的事情是察看你是否还有数据发送给对方,如果没有的话,那么你也就可以close这个SOCKET,发送FIN报文给对方,也即关闭连接。所以你在CLOSE_WAIT状态下,需要完成的事情是等待你去关闭连接。
LAST_ACK: 这个状态还是比较容易好理解的,它是被动关闭一方在发送FIN报文后,最后等待对方的ACK报文。当收到ACK报文后,也即可以进入到CLOSED可用状态了。
补充:
a. 默认情况下(不改变socket选项),当你调用close( or closesocket,以下说close不再重复)时,如果发送缓冲中还有数据,TCP会继续把数据发送完。
b. 发送了FIN只是表示这端不能继续发送数据(应用层不能再调用send发送),但是还可以接收数据。
c. 应用层如何知道对端关闭?通常,在最简单的阻塞模型中,当你调用recv时,如果返回0,则表示对端关闭。在这个时候通常的做法就是也调用close,那么TCP层就发送FIN,继续完成四次握手。如果你不调用close,那么对端就会处于FIN_WAIT_2状态,而本端则会处于CLOSE_WAIT状态。这个可以写代码试试。
d. 在很多时候,TCP连接的断开都会由TCP层自动进行,例如你CTRL+C终止你的程序,TCP连接依然会正常关闭,你可以写代码试试。
思考:
1、 为什么建立连接协议是三次握手,而关闭连接却是四次握手呢?
这是因为服务端的LISTEN状态下的SOCKET当收到SYN报文的建连请求后,它可以把ACK和SYN(ACK起应答作用,而SYN起同步作用)放在一个报文里来发送。但关闭连接时,当收到对方的FIN报文通知时,它仅仅表示对方没有数据发送给你了;但未必你所有的数据都全部发送给对方了,所以你可能未必会马上会关闭SOCKET,也即你可能还需要发送一些数据给对方之后,再发送FIN报文给对方来表示你同意现在可以关闭连接了,所以它这里的ACK报文和FIN报文多数情况下都是分开发送的。
2. 为什么不能用两次握手进行连接?
我们知道,3次握手完成两个重要的功能,既要双方做好发送数据的准备工作(双方都知道彼此已准备好),也要允许双方就初始序列号进行协商,这个序列号在握手过程中被发送和确认。
现在把三次握手改成仅需要两次握手,死锁是可能发生的。作为例子,考虑计算机S和C之间的通信,假定C给S发送一个连接请求分组,S收到了这个分组,并发送了确认应答分组。按照两次握手的协定,S认为连接已经成功地建立了,可以开始发送数据分组。可是,C在 S的应答分组在传输中被丢失的情况下,将不知道S是否已准备好,不知道S建立什么样的序列号,C甚至怀疑S是否收到自己的连接请求分组。在这种情况下,C认为连接还未建立成功,将忽略S发来的任何数据分组,只等待连接确认应答分组。而S在发出的数据分组超时后,重复发送同样的数据分组。这样就形成了死锁。
3. 为什么TIME_WAIT状态还需要等2MSL后才能返回到CLOSED状态?
什么是2MSL?MSL即Maximum Segment Lifetime,也就是报文最大生存时间,引用《TCP/IP详解》中的话:“它(MSL)是任何报文段被丢弃前在网络内的最长时间。”那么,2MSL也就是这个时间的2倍,当TCP连接完成四个报文段的交换时,主动关闭的一方将继续等待一定时间(2-4分钟),即使两端的应用程序结束。例如在客户端关闭后,使用netstat查看的结果:
C:\\>netstat -na | find "172.29.21.25"
TCP 172.29.132.60:2795 172.29.21.25:23 TIME_WAIT
为什么需要这个2MSL呢?
第一,虽然双方都同意关闭连接了,而且握手的4个报文也都协调和发送完毕,按理可以直接回到CLOSED状态(就好比从SYN_SEND状态到ESTABLISH状态那样);但是因为我们必须要假想网络是不可靠的,你无法保证你最后发送的ACK报文会一定被对方收到,因此对方处于LAST_ACK状态下的SOCKET可能会因为超时未收到ACK报文,而重发FIN报文,所以这个TIME_WAIT状态的作用就是用来重发可能丢失的ACK报文。
第二,报文可能会被混淆,意思是说,其他时候的连接可能会被当作本次的连接。直接引用《The TCP/IP Guide》的说法:The second is to provide a “buffering period” between the end of this connection and any subsequent ones. If not for this period, it is possible that packets from different connections could be mixed, creating confusion.
当某个连接的一端处于TIME_WAIT状态时,该连接将不能再被使用。事实上,对于我们比较有现实意义的是,这个端口将不能再被使用。某个端口处于TIME_WAIT状态(其实应该是这个连接)时,这意味着这个TCP连接并没有断开(完全断开),那么,如果你bind这个端口,就会失败。对于服务器而言,如果服务器突然crash掉了,那么它将无法在2MSL内重新启动,因为bind会失败。解决这个问题的一个方法就是设置socket的SO_REUSEADDR选项。这个选项意味着你可以重用一个地址。
当建立一个TCP连接时,服务器端会继续用原有端口监听,同时用这个端口与客户端通信。而客户端默认情况下会使用一个随机端口与服务器端的监听端口通信。有时候,为了服务器端的安全性,我们需要对客户端进行验证,即限定某个IP某个特定端口的客户端。客户端可以使用bind来使用特定的端口。对于服务器端,当设置了SO_REUSEADDR选项时,它可以在2MSL内启动并listen成功。但是对于客户端,当使用bind并设置SO_REUSEADDR时,如果在2MSL内启动,虽然bind会成功,但是在windows平台上connect会失败。而在Linux上则不存在这个问题。(我的实验平台:winxp, ubuntu7.10)
要解决windows平台的这个问题,可以设置SO_LINGER选项。SO_LINGER选项决定调用close时TCP的行为。SO_LINGER涉及到linger结构体,如果设置结构体中l_onoff为非0,l_linger为0,那么调用close时TCP连接会立刻断开,TCP不会将发送缓冲中未发送的数据发送,而是立即发送一个RST报文给对方,这个时候TCP连接(关闭时)就不会进入TIME_WAIT状态。如你所见,这样做虽然解决了问题,但是并不安全。通过以上方式设置SO_LINGER状态,等同于设置SO_DONTLINGER状态。
当TCP连接发生一些物理上的意外情况时,例如网线断开,linux上的TCP实现会依然认为该连接有效,而windows则会在一定时间后返回错误信息。这似乎可以通过设置SO_KEEPALIVE选项来解决,不过不知道这个选项是否对于所有平台都有效。
参考:
TCP连接中的TIME_WAIT状态 - sunnydogzhou的专栏 - 博客频道 - CSDN.NET http://blog.csdn.net/sunnydogzhou/article/details/6572071
TCP连接状态详解及TIME_WAIT过多的解决方法_小强_新浪博客 http://blog.sina.com.cn/s/blog_8e5d24890102w9yi.html
TCP协议三次握手连接四次握手断开和DOS攻击 - NowOrNever - 博客频道 - CSDN.NET http://blog.csdn.net/fw0124/article/details/7452695
以上是关于TCP三次握手四次挥手及状态转换图的主要内容,如果未能解决你的问题,请参考以下文章
三次握手及四次挥手在TCP/ip模型的哪一层进行的?最好有理由~
Go 语言自我提升 (三次握手 - 四次挥手 - TCP状态图 - udp - 网络文件传输)