Memcached源代码分析 - Memcached源代码分析之消息回应
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Memcached源代码分析 - Memcached源代码分析之消息回应相关的知识,希望对你有一定的参考价值。
文章列表:
《Memcached源代码分析 - Memcached源代码分析之基于Libevent的网络模型(1)》
《Memcached源代码分析 - Memcached源代码分析之命令解析(2)》
《Memcached源代码分析 - Memcached源代码分析之消息回应(3) 》
《Memcached源代码分析 - Memcached源代码分析之HashTable(4) 》
《Memcached源代码分析 - Memcached源代码分析之增删改查操作(5) 》
《Memcached源代码分析 - Memcached源代码分析之LRU算法(6)》
《Memcached源代码分析 - Memcached源代码分析之存储机制Slabs(7)》
《Memcached源代码分析 - Memcached源代码分析之总结篇(8)》前言
上一章《Memcached源代码分析 - Memcached源代码分析之命令解析(2)》。我们花了非常大的力气去解说Memcached怎样从client读取命令,而且解析命令,然后处理命令而且向client回应消息。
这一章,我们主要来解说Memcached回应消息的技术细节。
本章前,我们先须要了解几个知识点(msghdr和iovc)。
msghdr结构:
struct msghdr {
void *msg_name;
socklen_t msg_namelen;
struct iovec *msg_iov;
size_t msg_iovlen;
void *msg_control;
size_t msg_controllen;
int msg_flags;
};iovc结构:
#include <sys/uio.h>
/* Structure for scatter/gather I/O. */
struct iovec {
void *iov_base; /* Pointer to data. */
size_t iov_len; /* Length of data. */
};Memcached是通过sendmsg函数向client发送数据的,就会用到上面的结构,不了解这个结构的。建议先了解之后再继续往下看。
Memcached消息回应源代码分析
数据结构
我们继续看一下conn这个结构。
conn结构我们上一期说过,主要是存储单个client的连接详情信息。
每个client连接到Memcached都会有这么一个数据结构。
typedef struct conn conn;
struct conn {
//....
/* data for the mwrite state */
//iov主要存储iov的数据结构
//iov数据结构会在conn_new中初始化,初始化的时候,系统会分配400个iovec的结构,最高水位600个
struct iovec *iov;
//iov的长度
int iovsize; /* number of elements allocated in iov[] */
//iovused 这个主要记录iov使用了多少
int iovused; /* number of elements used in iov[] */
//msglist主要存储msghdr的列表数据结构
//msglist数据结构在conn_new中初始化的时候。系统会分配10个结构
struct msghdr *msglist;
//msglist的长度。初始化为10个,最高水位100。不够用的时候会realloc。每次扩容都会扩容一倍
int msgsize; /* number of elements allocated in msglist[] */
//msglist已经使用的长度
int msgused; /* number of elements used in msglist[] */
//这个參数主要帮助记录那些msglist已经发送过了,哪些没有发送过。
int msgcurr; /* element in msglist[] being transmitted now */
int msgbytes; /* number of bytes in current msg */
}
我们能够看一下conn_new这种方法。这种方法应该在第一章节的时候讲到过。
这边主要看一下iov和msglist两个參数初始化的过程。
conn *conn_new(const int sfd, enum conn_states init_state,
const int event_flags, const int read_buffer_size,
enum network_transport transport, struct event_base *base) {
//...
c->rbuf = c->wbuf = 0;
c->ilist = 0;
c->suffixlist = 0;
c->iov = 0;
c->msglist = 0;
c->hdrbuf = 0;
c->rsize = read_buffer_size;
c->wsize = DATA_BUFFER_SIZE;
c->isize = ITEM_LIST_INITIAL;
c->suffixsize = SUFFIX_LIST_INITIAL;
c->iovsize = IOV_LIST_INITIAL; //初始化400
c->msgsize = MSG_LIST_INITIAL; //初始化10
c->hdrsize = 0;
c->rbuf = (char *) malloc((size_t) c->rsize);
c->wbuf = (char *) malloc((size_t) c->wsize);
c->ilist = (item **) malloc(sizeof(item *) * c->isize);
c->suffixlist = (char **) malloc(sizeof(char *) * c->suffixsize);
c->iov = (struct iovec *) malloc(sizeof(struct iovec) * c->iovsize); //初始化iov
c->msglist = (struct msghdr *) malloc(
sizeof(struct msghdr) * c->msgsize); //初始化msglist
//...
}
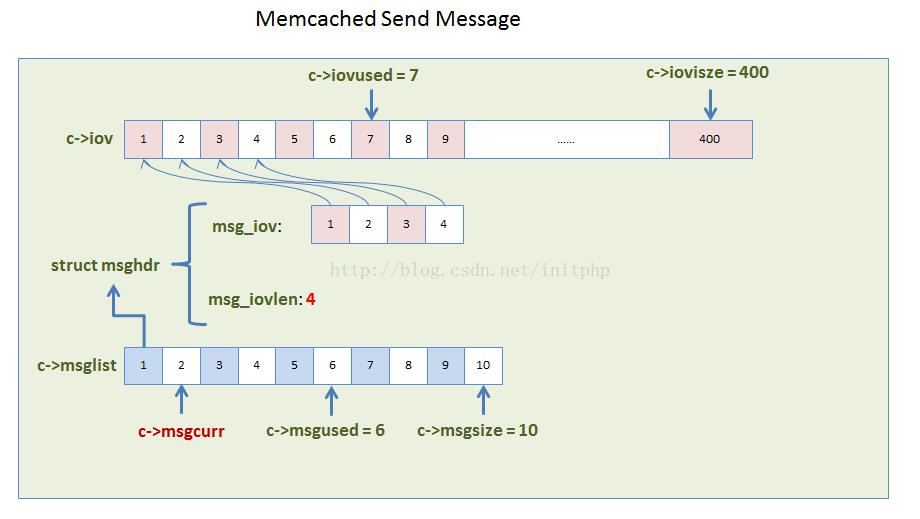
数据结构关系图(iov和msglist之间的关系):
从process_get_command開始
我们继续从process_get_command,获取memcached的缓存数据这种方法開始。
在这种方法中。我们主要看add_iov这种方法。Memcached主要是通过add_iov方法,将须要发送给client的数据装到iov和msglist结构中去的。
/* ntokens is overwritten here... shrug.. */
//处理GET请求的命令
static inline void process_get_command(conn *c, token_t *tokens, size_t ntokens,
bool return_cas) {
//处理GET命令
char *key;
size_t nkey;
int i = 0;
item *it;
//&tokens[0] 是操作的方法
//&tokens[1] 为key
//token_t 存储了value和length
token_t *key_token = &tokens[KEY_TOKEN];
char *suffix;
assert(c != NULL);
do {
//假设key的长度不为0
while (key_token->length != 0) {
key = key_token->value;
nkey = key_token->length;
//推断key的长度是否超过了最大的长度。memcache key的最大长度为250
//这个地方须要很注意,我们在寻常的使用中。还是要注意key的字节长度的
if (nkey > KEY_MAX_LENGTH) {
//out_string 向外部输出数据
out_string(c, "CLIENT_ERROR bad command line format");
while (i-- > 0) {
item_remove(*(c->ilist + i));
}
return;
}
//这边是从Memcached的内存存储快中去取数据
it = item_get(key, nkey);
if (settings.detail_enabled) {
//状态记录,key的记录数的方法
stats_prefix_record_get(key, nkey, NULL != it);
}
//假设获取到了数据
if (it) {
//c->ilist 存放用于向外部写数据的buf
//假设ilist太小,则又一次分配一块内存
if (i >= c->isize) {
item **new_list = realloc(c->ilist,
sizeof(item *) * c->isize * 2);
if (new_list) {
//存放须要向client写数据的item的列表的长度
c->isize *= 2;
//存放须要向client写数据的item的列表,这边支持
c->ilist = new_list;
} else {
STATS_LOCK();
stats.malloc_fails++;
STATS_UNLOCK();
item_remove(it);
break;
}
}
/*
* Construct the response. Each hit adds three elements to the
* outgoing data list:
* "VALUE "
* key
* " " + flags + " " + data length + "\r\n" + data (with \r\n)
*/
//初始化返回出去的数据结构
if (return_cas) {
//......
} else {
MEMCACHED_COMMAND_GET(c->sfd, ITEM_key(it), it->nkey,
it->nbytes, ITEM_get_cas(it));
//将须要返回的数据填充到IOV结构中
//命令:get userId
//返回的结构:
//VALUE userId 0 5
//55555
//END
if (<strong><span style="color:#FF0000;">add_iov</span></strong>(c, "VALUE ", 6) != 0
|| <strong><span style="color:#FF0000;">add_iov</span></strong>(c, ITEM_key(it), it->nkey) != 0
|| <strong><span style="color:#FF0000;">add_iov</span></strong>(c, ITEM_suffix(it),
it->nsuffix + it->nbytes) != 0) {
item_remove(it);
break;
}
}
if (settings.verbose > 1) {
int ii;
fprintf(stderr, ">%d sending key ", c->sfd);
for (ii = 0; ii < it->nkey; ++ii) {
fprintf(stderr, "%c", key[ii]);
}
fprintf(stderr, "\n");
}
/* item_get() has incremented it->refcount for us */
pthread_mutex_lock(&c->thread->stats.mutex);
c->thread->stats.slab_stats[it->slabs_clsid].get_hits++;
c->thread->stats.get_cmds++;
pthread_mutex_unlock(&c->thread->stats.mutex);
item_update(it);
*(c->ilist + i) = it;
i++;
} else {
pthread_mutex_lock(&c->thread->stats.mutex);
c->thread->stats.get_misses++;
c->thread->stats.get_cmds++;
pthread_mutex_unlock(&c->thread->stats.mutex);
MEMCACHED_COMMAND_GET(c->sfd, key, nkey, -1, 0);
}
key_token++;
}
/*
* If the command string hasn't been fully processed, get the next set
* of tokens.
*/
//假设命令行中的命令没有所有被处理,则继续下一个命令
//一个命令行中,能够get多个元素
if (key_token->value != NULL) {
ntokens = tokenize_command(key_token->value, tokens, MAX_TOKENS);
key_token = tokens;
}
} while (key_token->value != NULL);
c->icurr = c->ilist;
c->ileft = i;
if (return_cas) {
c->suffixcurr = c->suffixlist;
c->suffixleft = i;
}
if (settings.verbose > 1)
fprintf(stderr, ">%d END\n", c->sfd);
/*
If the loop was terminated because of out-of-memory, it is not
reliable to add END\r\n to the buffer, because it might not end
in \r\n. So we send SERVER_ERROR instead.
*/
//加入结束标志符号
if (key_token->value != NULL || <strong><span style="color:#FF0000;">add_iov</span></strong>(c, "END\r\n", 5) != 0
|| (IS_UDP(c->transport) && build_udp_headers(c) != 0)) {
out_of_memory(c, "SERVER_ERROR out of memory writing get response");
} else {
//将状态改动为写,这边读取到item的数据后,又開始须要往client写数据了。
conn_set_state(c, conn_mwrite);
c->msgcurr = 0;
}
}
add_iov 方法
add_iov方法,主要作用:
1. 将Memcached须要发送的数据。分成N多个IOV的块
2. 将IOV块加入到msghdr的结构中去。
static int add_iov(conn *c, const void *buf, int len) {
struct msghdr *m;
int leftover;
bool limit_to_mtu;
assert(c != NULL);
do {
//消息数组 msglist 存储msghdr结构
//这边是获取最新的msghdr数据结构指针
m = &c->msglist[c->msgused - 1];
/*
* Limit UDP packets, and the first payloads of TCP replies, to
* UDP_MAX_PAYLOAD_SIZE bytes.
*/
limit_to_mtu = IS_UDP(c->transport) || (1 == c->msgused);
/* We may need to start a new msghdr if this one is full. */
//假设msghdr结构中的iov满了。则须要使用更新的msghdr数据结构
if (m->msg_iovlen == IOV_MAX
|| (limit_to_mtu && c->msgbytes >= UDP_MAX_PAYLOAD_SIZE)) {
//加入msghdr,这种方法中回去推断初始化的时候10个msghdr结构是否够用。不够用的话会扩容
add_msghdr(c);
//指向下一个新的msghdr数据结构
m = &c->msglist[c->msgused - 1];
}
//确认IOV的空间大小,初始化默认是400个,水位600
//假设IOV也不够用了。就会去扩容
if (ensure_iov_space(c) != 0)
return -1;
/* If the fragment is too big to fit in the datagram, split it up */
if (limit_to_mtu && len + c->msgbytes > UDP_MAX_PAYLOAD_SIZE) {
leftover = len + c->msgbytes - UDP_MAX_PAYLOAD_SIZE;
len -= leftover;
} else {
leftover = 0;
}
m = &c->msglist[c->msgused - 1];
//m->msg_iov參数指向c->iov这个结构。
//详细m->msg_iov怎样指向到c->iov这个结构的,须要看一下add_msghdr这种方法
//向IOV中填充BUF
m->msg_iov[m->msg_iovlen].iov_base = (void *) buf;
//buf的长度
m->msg_iov[m->msg_iovlen].iov_len = len; //填充长度
c->msgbytes += len;
c->iovused++;
m->msg_iovlen++; //msg_iovlen + 1
buf = ((char *) buf) + len;
len = leftover;
} while (leftover > 0);
return 0;
}add_msghdr 方法 msghdr扩容
在add_iov方法中,我们能够看到。当IOV块加入满了之后,会调用这种方法扩容msgdhr的个数。
这种方法主要两个作用:
1. 检查c->msglist列表长度是否够用。
2. 使用最新的c->msglist中的一个msghdr元素,而且将msghdr->msg_iov指向c->iov最新未使用的那个iov的指针地址。
static int add_msghdr(conn *c) {
//c->msglist 这个列表用来存储msghdr结构
struct msghdr *msg;
assert(c != NULL);
//假设msglist的长度和已经使用的长度相等的时候,说明msglist已经用完了,须要扩容
if (c->msgsize == c->msgused) {
//扩容两倍
msg = realloc(c->msglist, c->msgsize * 2 * sizeof(struct msghdr));
if (!msg) {
STATS_LOCK();
stats.malloc_fails++;
STATS_UNLOCK();
return -1;
}
c->msglist = msg; //将c->msglist指向当前新的列表
c->msgsize *= 2; //size也会跟着添加
}
//msg又一次指向未使用的msghdr指针位置
msg = c->msglist + c->msgused;
/* this wipes msg_iovlen, msg_control, msg_controllen, and
msg_flags, the last 3 of which aren't defined on solaris: */
//将新的msghdr块初始化设置为0
memset(msg, 0, sizeof(struct msghdr));
//新的msghdr的msg_iov指向 struct iovec *iov结构
msg->msg_iov = &c->iov[c->iovused];
if (IS_UDP(c->transport) && c->request_addr_size > 0) {
msg->msg_name = &c->request_addr;
msg->msg_namelen = c->request_addr_size;
}
c->msgbytes = 0;
c->msgused++;
if (IS_UDP(c->transport)) {
/* Leave room for the UDP header, which we'll fill in later. */
return add_iov(c, NULL, UDP_HEADER_SIZE);
}
return 0;
}
ensure_iov_space 方法 IOV扩容
这种方法主要检查c->iov是否还有剩余空间。假设不够用了。则扩容2倍。
static int ensure_iov_space(conn *c) {
assert(c != NULL);
//假设IOV也使用完了....IOV,分配新的IOV
if (c->iovused >= c->iovsize) {
int i, iovnum;
struct iovec *new_iov = (struct iovec *) realloc(c->iov,
(c->iovsize * 2) * sizeof(struct iovec));
if (!new_iov) {
STATS_LOCK();
stats.malloc_fails++;
STATS_UNLOCK();
return -1;
}
c->iov = new_iov;
c->iovsize *= 2; //扩容两倍
/* Point all the msghdr structures at the new list. */
for (i = 0, iovnum = 0; i < c->msgused; i++) {
c->msglist[i].msg_iov = &c->iov[iovnum];
iovnum += c->msglist[i].msg_iovlen;
}
}
return 0;
}
conn_mwrite
conn_mwrite状态在drive_machine这种方法中。
主要就是向client写数据了。
从上面的add_iov方法中,我们知道Memcached会将须要待发送的数据写入c->msglist结构中。
真正写数据的方法是transmit。
//drive_machine方法
//这个conn_mwrite是向client写数据
case conn_mwrite:
if (IS_UDP(c->transport) && c->msgcurr == 0
&& build_udp_headers(c) != 0) {
if (settings.verbose > 0)
fprintf(stderr, "Failed to build UDP headers\n");
conn_set_state(c, conn_closing);
break;
}
//transmit这种方法很重要,主要向client写数据的操作都在这种方法中进行
//返回transmit_result枚举类型。用于推断是否写成功,假设失败,则关闭连接
switch (transmit(c)) {
//假设向client发送数据成功
case TRANSMIT_COMPLETE:
if (c->state == conn_mwrite) {
conn_release_items(c);
/* XXX: I don't know why this wasn't the general case */
if (c->protocol == binary_prot) {
conn_set_state(c, c->write_and_go);
} else {
//这边是TCP的状态
//状态又会切回到conn_new_cmd这个状态
//conn_new_cmd主要是继续解析c->rbuf容器中剩余的命令參数
conn_set_state(c, conn_new_cmd);
}
} else if (c->state == conn_write) {
if (c->write_and_free) {
free(c->write_and_free);
c->write_and_free = 0;
}
conn_set_state(c, c->write_and_go);
} else {
if (settings.verbose > 0)
fprintf(stderr, "Unexpected state %d\n", c->state);
conn_set_state(c, conn_closing);
}
break;transmit 方法
这种方法主要作用:向client发送数据
//这种方法主要向client写数据
//假设数据没有发送完,则会一直循环conn_mwrite这个状态,直到数据发送完毕为止
static enum transmit_result transmit(conn *c) {
assert(c != NULL);
//每次发送之前,都会来校验前一次的数据是否发送完了
//假设前一次的msghdr结构体内的数据已经发送完了,则c->msgcurr指针就会往后移动一位,
//移动到下一个等待发送的msghdr结构体指针上
//c->msgcurr初始值为:0
if (c->msgcurr < c->msgused && c->msglist[c->msgcurr].msg_iovlen == 0) {
/* Finished writing the current msg; advance to the next. */
c->msgcurr++;
}
//假设c->msgcurr(已发送)小于c->msgused(已使用),则就能够知道还没发送完,则须要继续发送
//假设c->msgcurr(已发送)等于c->msgused(已使用),则说明已经发送完了。返回TRANSMIT_COMPLETE状态
if (c->msgcurr < c->msgused) {
ssize_t res;
//从c->msglist取出一个待发送的msghdr结构
struct msghdr *m = &c->msglist[c->msgcurr];
//向client发送数据
res = sendmsg(c->sfd, m, 0);
//发送成功的情况
if (res > 0) {
pthread_mutex_lock(&c->thread->stats.mutex);
c->thread->stats.bytes_written += res;
pthread_mutex_unlock(&c->thread->stats.mutex);
/* We've written some of the data. Remove the completed
iovec entries from the list of pending writes. */
//这边会检查发送了多少
while (m->msg_iovlen > 0 && res >= m->msg_iov->iov_len) {
res -= m->msg_iov->iov_len;
m->msg_iovlen--;
m->msg_iov++;
}
/* Might have written just part of the last iovec entry;
adjust it so the next write will do the rest. */
if (res > 0) {
m->msg_iov->iov_base = (caddr_t) m->msg_iov->iov_base + res;
m->msg_iov->iov_len -= res;
}
return TRANSMIT_INCOMPLETE;
}
//发送失败的情况
if (res == -1 && (errno == EAGAIN || errno == EWOULDBLOCK)) {
if (!update_event(c, EV_WRITE | EV_PERSIST)) {
if (settings.verbose > 0)
fprintf(stderr, "Couldn't update event\n");
conn_set_state(c, conn_closing);
return TRANSMIT_HARD_ERROR;
}
return TRANSMIT_SOFT_ERROR;
}
/* if res == 0 or res == -1 and error is not EAGAIN or EWOULDBLOCK,
we have a real error, on which we close the connection */
if (settings.verbose > 0)
perror("Failed to write, and not due to blocking");
if (IS_UDP(c->transport))
conn_set_state(c, conn_read);
else
conn_set_state(c, conn_closing);
return TRANSMIT_HARD_ERROR;
} else {
return TRANSMIT_COMPLETE;
}
}
conn_shrink 方法
当数据发送成功后。会跳转到conn_new_cmd这个状态继续处理,然后进入reset_cmd_handler方法,然后进入conn_shrink方法。
conn_shrink主要是用于检查buf的大小,是否超过了预定的水位,假设超过了,则须要又一次realloc。
//又一次设置命令handler
static void reset_cmd_handler(conn *c) {
c->cmd = -1;
c->substate = bin_no_state;
if (c->item != NULL) {
item_remove(c->item);
c->item = NULL;
}
conn_shrink(c); //这种方法是检查c->rbuf容器的大小
//假设剩余未解析的命令 > 0的话,继续跳转到conn_parse_cmd解析命令
if (c->rbytes > 0) {
conn_set_state(c, conn_parse_cmd);
} else {
//假设命令都解析完毕了。则继续等待新的数据到来
conn_set_state(c, conn_waiting);
}
}//检查rbuf的大小
static void conn_shrink(conn *c) {
assert(c != NULL);
if (IS_UDP(c->transport))
return;
//假设bufsize大于READ_BUFFER_HIGHWAT(8192)的时候须要又一次处理
//DATA_BUFFER_SIZE等于2048,所以我们能够看到之前的代码中对rbuf最多仅仅能进行4次recalloc
if (c->rsize > READ_BUFFER_HIGHWAT && c->rbytes < DATA_BUFFER_SIZE) {
char *newbuf;
if (c->rcurr != c->rbuf)
memmove(c->rbuf, c->rcurr, (size_t) c->rbytes); //内存移动
newbuf = (char *) realloc((void *) c->rbuf, DATA_BUFFER_SIZE);
if (newbuf) {
c->rbuf = newbuf;
c->rsize = DATA_BUFFER_SIZE;
}
/* TODO check other branch... */
c->rcurr = c->rbuf;
}
if (c->isize > ITEM_LIST_HIGHWAT) {
item **newbuf = (item**) realloc((void *) c->ilist,
ITEM_LIST_INITIAL * sizeof(c->ilist[0]));
if (newbuf) {
c->ilist = newbuf;
c->isize = ITEM_LIST_INITIAL;
}
/* TODO check error condition? */
}
//假设大于c->msglist的水位了。则又一次realloc
if (c->msgsize > MSG_LIST_HIGHWAT) {
struct msghdr *newbuf = (struct msghdr *) realloc((void *) c->msglist,
MSG_LIST_INITIAL * sizeof(c->msglist[0]));
if (newbuf) {
c->msglist = newbuf;
c->msgsize = MSG_LIST_INITIAL;
}
/* TODO check error condition? */
}
//假设大于c->iovsize的水位了,则又一次realloc
if (c->iovsize > IOV_LIST_HIGHWAT) {
struct iovec *newbuf = (struct iovec *) realloc((void *) c->iov,
IOV_LIST_INITIAL * sizeof(c->iov[0]));
if (newbuf) {
c->iov = newbuf;
c->iovsize = IOV_LIST_INITIAL;
}
/* TODO check return value */
}
}
以上是关于Memcached源代码分析 - Memcached源代码分析之消息回应的主要内容,如果未能解决你的问题,请参考以下文章
memcache异常错误:net.spy.memcached.OperationTimeoutException: Timeout waiting for value 解决分析
memcache异常错误:net.spy.memcached.OperationTimeoutException: Timeout waiting for value 解决分析
memcache异常错误:net.spy.memcached.OperationTimeoutException: Timeout waiting for value 解决分析