sam9x5 sam-ba
Posted 张鹏的博客
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了sam9x5 sam-ba相关的知识,希望对你有一定的参考价值。
AT91SAM9x5 EK Board
SoC Features
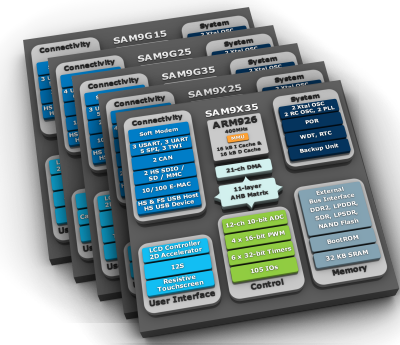
The Atmel® | SMART® ARM®-based SAM9x5 family is based on the ARM926EJ-S core. The SAM9x5 family runs at 400 MHz and features connectivity peripherals, high data bandwidth architecture, and a small footprint package option, making it an optimized solution for industrial applications. Peripherals include a soft modem supporting exclusively the Conexant SmartDAA line driver, High Speed (480Mbps) USB Host/Device ports and Full Speed USB Host with on-chip transceivers, 10/100 Ethernet MAC, two HS SDCard/SDIO/MMC interfaces, USARTs, SPIs, I2S, multiple TWIs and 10-bit ADC. It offers support for 8-bank DDR2 and for LPDDR, SDRAM/LPSDRAM, static memories, as well as specific circuitry for MLC/SLC NAND Flash with integrated ECC up to 24 bits. The SAM9x5 family is available in a 217-ball BGA package with 0.8mm ball pitch, as well as a 247-ball BGA package with 0.5mm ball pitch.
Kit Information
Kit Overview
|
Access the console
The usual serial communication parameters are 115200 8-N-1 :
| Baud rate | 115200 |
| Data | 8 bits |
| Parity | None |
| Stop | 1 bit |
| Flow control | None |
Access the console on DBGU serial port
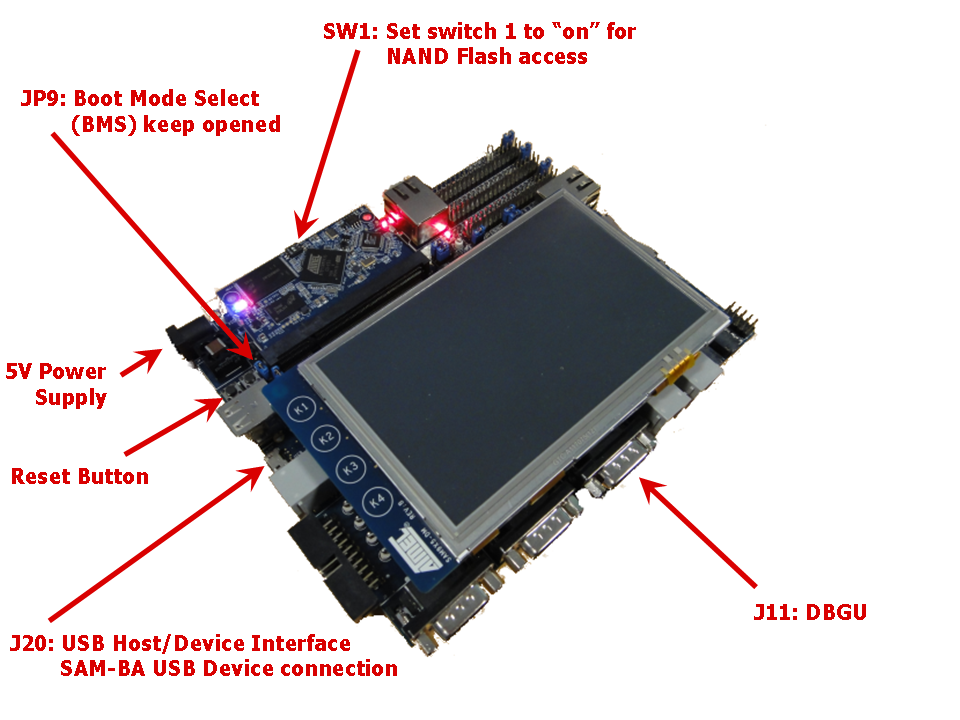
The DBGU serial console can be accessed from the RS-232 connector (marked as DBGU J11).
Using RS-232 connector (DBGU J11)
- Connect a DB9 serial cable to the J11 connector
- Now open your favorite terminal emulator with appropriate settings
-
- For Linux users: identify the USB connection by monitoring the last lines of
dmesgcommand. The/dev/ttyUSBxor/dev/ttyACMxnumber will be used to configure the terminal emulator.[605576.562740] usb 1-1.1.2: new full-speed USB device number 17 using ehci-pci [605576.660920] usb 1-1.1.2: New USB device found, idVendor=0403, idProduct=6001 [605576.660933] usb 1-1.1.2: New USB device strings: Mfr=1, Product=2, SerialNumber=3 [605576.660939] usb 1-1.1.2: Product: TTL232R-3V3 [605576.660944] usb 1-1.1.2: Manufacturer: FTDI [605576.660958] usb 1-1.1.2: SerialNumber: FTGNVZ04 [605576.663092] ftdi_sio 1-1.1.2:1.0: FTDI USB Serial Device converter detected [605576.663120] usb 1-1.1.2: Detected FT232RL [605576.663122] usb 1-1.1.2: Number of endpoints 2 [605576.663124] usb 1-1.1.2: Endpoint 1 MaxPacketSize 64 [605576.663126] usb 1-1.1.2: Endpoint 2 MaxPacketSize 64 [605576.663128] usb 1-1.1.2: Setting MaxPacketSize 64 [605576.663483] usb 1-1.1.2: FTDI USB Serial Device converter now attached to ttyUSB0A /dev/ttyUSB0 node has been created.
- For Linux users: identify the USB connection by monitoring the last lines of
- Now open your favorite terminal emulator with appropriate settings
Demo
Demo archives
| Media type | Board | Screen | Binary | Description |
|---|---|---|---|---|
| Yocto / Poky based demo | ||||
| NAND Flash | AT91SAM9x5-EK | - | linux4sam-poky-at91sam9x5ek-5.5.zip md5: 8f3ba092172b94ae5a3ca671dcc075a6 |
Linux4SAM Yocto / Poky based demo compiled from tag linux4sam_5.5 Follow procedure: #Flash_the_demo |
| SD Card image | AT91SAM9x5-EK | - | linux4sam-poky-at91sam9x5ek-5.5.img.bz2 md5: a186147ac73476e2a0314463542b68be |
Linux4SAM Yocto / Poky based demo compiled from tag linux4sam_5.5 Follow procedure: #Create_a_SD_card_with_the_demo |
| BuildRoot based demo | ||||
| SD Card image | AT91SAM9x5-EK | - | linux4sam-buildroot-at91sam9x5ek-5.5.img.bz2 md5: 4f45b0b0fd7a85011de7837abe0533c1 |
Linux4SAM BuildRoot based demo compiled from tag linux4sam_5.5 Follow procedure: #Create_a_SD_card_with_the_demo |
Flash the demo
Run script to flash the demo
- Download the demo package for the board.
- Extract the demo package and launch the script to flash the demo:
- For Microsoft Windows users: Launch the
.batfile corresponding to the board that you are using
This script will run SAM-BA with proper parameters. - For Linux users: if the /dev/ttyACMx that appears is different from /dev/ttyACM0, edit the
.shfile and modify /dev/ttyACMx device number - For Linux users: Launch the
.shfile corresponding to the board that you are using.
This script will runs SAM-BA with proper parameters
- For Microsoft Windows users: Launch the
- When the logfile.log appears (this will take a few minutes), check that
===== Done. =====
is written at the end of the file. - Remove the USB cable.
- Connect a serial link on DBGU and open the terminal emulator program as explained just above
- Power cycle the board.
- Look the system booting on the LCD screen or through the serial line
Play with the demo
Build From source code
Setup ARM Cross Compiler
- Ubuntu:
In Ubuntu, you can install the ARM Cross Compiler by doing:sudo apt-get install gcc-arm-linux-gnueabi export CROSS_COMPILE=arm-linux-gnueabi-
- Others:
For others, you can download the Linaro cross compiler and setup the environment by doing:wget -c https://releases.linaro.org/14.11/components/toolchain/binaries/arm-linux-gnueabi/gcc-linaro-4.9-2014.11-x86_64_arm-linux-gnueabi.tar.xz tar xf gcc-linaro-4.9-2014.11-x86_64_arm-linux-gnueabi.tar.xz export CROSS_COMPILE=`pwd`/gcc-linaro-4.9-2014.11-x86_64_arm-linux-gnueabi/bin/arm-linux-gnueabi-
Build AT91Bootstrap from sources
This section describes how to get source code from the git repository, how to configure with the default configuration, how to customize AT91Bootstrap based on the default configuration and finally to build AT91Bootstrap to produce the binary. take the default configuration to download U-Boot from NandFlash for example.
Get AT91Boostrap Source Code
You can easily download AT91Bootstrap source code on the at91bootstrapTo get the source code, you should clone the repository by doing:
$ git clone git://github.com/linux4sam/at91bootstrap.git Cloning into ‘at91bootstrap‘... remote: Reusing existing pack: 2476, done. remote: Counting objects: 167, done. remote: Compressing objects: 100% (167/167), done. remote: Total 2643 (delta 135), reused 0 (delta 0) Receiving objects: 100% (2643/2643), 2.06 MiB | 270 KiB/s, done. Resolving deltas: 100% (1809/1809), done. $ cd at91bootstrap/
Configure AT91Boostrap
Assuming you are at the AT91Bootstrap root directory, you will find a board/at91sam9x5ek folder which contains several default configuration files:
at91sam9x5eksd_uboot_defconfig at91sam9x5ekdf_uboot_defconfig at91sam9x5eknf_uboot_defconfig
![]() Tips:
Tips: nf means to read nandflash, df means to read serial flash, sd means to read mmc card.
![]() Tips:
Tips: linux means to load linux kernel to RAM, android means to load android kernel to RAM, uboot means to load u-boot to RAM, dt means to load dtb to RAM.
You can configure AT91Bootstrap to load U-Boot binary from NAND flash by doing:
$ make mrproper $ make at91sam9x5eknf_uboot_defconfigIf the configuring process is successful, the .config file can be found at AT91Bootstrap root directory.
Customize AT91Bootstrap
If the default configuration doesn‘t meet your need, after configuring with the default configuration, you can customize it by doing:$ make menuconfigNow, in the menuconfig dialog, you can easily add or remove some features to/from AT91Bootstrap as the same way as kernel configuration.
Build AT91Bootstrap
Then you can build the AT91Bootstrap binary by doing:$ make
If the building process is successful, the final .bin image is binaries/at91bootstrap.bin.
Build U-Boot from sources
Getting U-Boot sources
Dedicated page on U-Boot wiki: http://www.denx.de/wiki/U-Boot/SourceCode![]()
You can easily download U-Boot source code from Linux4SAM GitHub U-Boot repository![]() :
:
- clone the Linux4sam GitHub U-Boot repository
$ git clone git://github.com/linux4sam/u-boot-at91.git Cloning into ‘u-boot-at91‘... remote: Counting objects: 219350, done. remote: Compressing objects: 100% (40142/40142), done. remote: Total 219350 (delta 175755), reused 219350 (delta 175755) Receiving objects: 100% (219350/219350), 56.01 MiB | 1.24 MiB/s, done. Resolving deltas: 100% (175755/175755), done. $ cd u-boot-at91
- The source code has been taken from the master branch which is pointing to the latest branch we use. If you want to use the other branch, you can list them and use one of them by doing:
$ git branch -r origin/HEAD -> origin/master origin/master origin/u-boot-2012.10-at91 origin/u-boot-2013.07-at91 origin/u-boot-2014.07-at91 origin/u-boot-2015.01-at91 origin/u-boot-2016.03-at91 origin/uboot_5series_1.x $ git checkout origin/u-boot-2016.03-at91 -b u-boot-2016.03-at91 Branch u-boot-2016.03-at91 set up to track remote branch u-boot-2016.03-at91 from origin. Switched to a new branch ‘u-boot-2016.03-at91‘
Cross-compiling U-Boot
Before compile the U-Boot, you need setup cross compile toolchain in the section.
Once the AT91 U-Boot sources available, cross-compile U-Boot is made in two steps : configuration and compiling. Check the Configuration chapter![]() in U-Boot reference manual.
in U-Boot reference manual.
![]() Go to the
Go to the configs/ to find the exact target when invoking make.
The U-Boot environment variables can be store in different media, above config files can specified where to store the U-Boot environment.
# To put environment variables in serial flash: at91sam9x5ek_spiflash_defconfig # To put environment variables in nandflash (default): at91sam9x5ek_nandflash_defconfig # To put environment variables in SD/MMC card: at91sam9x5ek_mmc_defconfig
Here are the building steps for the AT91SAM9x5-EK board:
# You can change the config according to your needs. make at91sam9x5ek_nandflash_defconfig make
The result of these operations is a fresh U-Boot binary called u-boot.bin corresponding to the binary ELF file u-boot.
u-boot.binis the file you should store on the boardu-bootis the ELF format binary file you may use to debug U-Boot through a JTag link for instance.
Build Kernel from sources
Getting Kernel sources
To get the source code, you have to clone the repository:
$ git clone git://github.com/linux4sam/linux-at91.git Cloning into ‘linux-sama9x5-github‘... remote: Counting objects: 4524288, done. remote: Compressing objects: 100% (721/721), done. remote: Total 4524288 (delta 385), reused 1 (delta 1), pack-reused 4523564 Receiving objects: 100% (4524288/4524288), 1.22 GiB | 1.35 MiB/s, done. Resolving deltas: 100% (3777338/3777338), done. Checking connectivity... done. Checking out files: 100% (49565/49565), done.
The source code has been taken from the master branch which is pointing on the latest branch we use.
![]() Note that you can also add this Linux4SAM repository as a remote GIT repository
Note that you can also add this Linux4SAM repository as a remote GIT repository![]() to your usu
to your usu
$ git remote add linux4sam git://github.com/linux4sam/linux-at91.git $ git remote update linux4sam Fetching linux4sam From git://github.com/linux4sam/linux-at91 * [new branch] linux-2.6.39-at91 -> linux4sam/linux-2.6.39-at91 * [new branch] linux-3.10-at91 -> linux4sam/linux-3.10-at91 * [new branch] linux-3.15-at91 -> linux4sam/linux-3.15-at91 * [new branch] linux-3.18-at91 -> linux4sam/linux-3.18-at91 * [new branch] linux-3.4.9-at91 -> linux4sam/linux-3.4.9-at91 * [new branch] linux-3.6.9-at91 -> linux4sam/linux-3.6.9-at91 * [new branch] linux-4.1-at91 -> linux4sam/linux-4.1-at91 * [new branch] linux-4.4-at91 -> linux4sam/linux-4.4-at91 * [new branch] master -> linux4sam/master
If you want to use an other branch, you can list them and use one of them by doing this:
$ git branch -r origin/HEAD -> origin/master origin/linux-2.6.39-at91 origin/linux-3.10-at91 origin/linux-3.15-at91 origin/linux-3.18-at91 origin/linux-3.4.9-at91 origin/linux-3.6.9-at91 origin/linux-4.1-at91 origin/linux-4.4-at91 origin/master $ git checkout origin/linux-4.4-at91 -b linux-4.4-at91 Branch linux-4.1-at91 set up to track remote branch linux-4.4-at91 from origin. Switched to a new branch ‘linux-4.4-at91‘
Configure and Build the Linux kernel
Now you have to configure the Linux kernel according to your hardware. We have two default configuration at91 SoC inarch/arm/configs
arch/arm/configs/at91_dt_defconfig arch/arm/configs/sama5_defconfig
at91_dt_defconfig: for at91sam ARM926 series chipssama5_defconfig: for SAMA5 series chips
At this step, you can modify default configuration using the menuconfig
$ make ARCH=arm menuconfig
And build the Linux kernel image, before you build you need set up the cross compile toolchain, check this section.
$ make ARCH=arm [..] Kernel: arch/arm/boot/Image is ready Kernel: arch/arm/boot/zImage is ready
Now you have an usable compressed kernel image zImage.
If you need an uImage you can run this additional step:
make ARCH=arm uImage LOADADDR=0x20008000 [..] Kernel: arch/arm/boot/zImage is ready UIMAGE arch/arm/boot/uImage Image Name: Linux-4.1.0-linux4sam_5.3+ Created: Fri Sep 9 17:02:45 2016 Image Type: ARM Linux Kernel Image (uncompressed) Data Size: 3441072 Bytes = 3360.42 kB = 3.28 MB Load Address: 20008000 Entry Point: 20008000 Image arch/arm/boot/uImage is ready
make ARCH=arm dtbs [..] DTC arch/arm/boot/dts/at91rm9200ek.dtb DTC arch/arm/boot/dts/mpa1600.dtb DTC arch/arm/boot/dts/animeo_ip.dtb DTC arch/arm/boot/dts/at91-qil_a9260.dtb DTC arch/arm/boot/dts/aks-cdu.dtb DTC arch/arm/boot/dts/ethernut5.dtb DTC arch/arm/boot/dts/evk-pro3.dtb DTC arch/arm/boot/dts/tny_a9260.dtb DTC arch/arm/boot/dts/usb_a9260.dtb DTC arch/arm/boot/dts/at91sam9261ek.dtb DTC arch/arm/boot/dts/at91sam9263ek.dtb DTC arch/arm/boot/dts/tny_a9263.dtb DTC arch/arm/boot/dts/usb_a9263.dtb DTC arch/arm/boot/dts/at91-foxg20.dtb DTC arch/arm/boot/dts/at91-kizbox.dtb DTC arch/arm/boot/dts/at91sam9g20ek.dtb DTC arch/arm/boot/dts/at91sam9g20ek_2mmc.dtb DTC arch/arm/boot/dts/tny_a9g20.dtb DTC arch/arm/boot/dts/usb_a9g20.dtb DTC arch/arm/boot/dts/usb_a9g20_lpw.dtb DTC arch/arm/boot/dts/at91sam9m10g45ek.dtb DTC arch/arm/boot/dts/pm9g45.dtb DTC arch/arm/boot/dts/at91sam9n12ek.dtb DTC arch/arm/boot/dts/at91sam9rlek.dtb DTC arch/arm/boot/dts/at91-ariag25.dtb DTC arch/arm/boot/dts/at91-ariettag25.dtb DTC arch/arm/boot/dts/at91-cosino_mega2560.dtb DTC arch/arm/boot/dts/at91-kizboxmini.dtb DTC arch/arm/boot/dts/at91sam9g15ek.dtb DTC arch/arm/boot/dts/at91sam9g25ek.dtb DTC arch/arm/boot/dts/at91sam9g35ek.dtb DTC arch/arm/boot/dts/at91sam9x25ek.dtb DTC arch/arm/boot/dts/at91sam9x35ek.dtb
If the building process is successful, the final images can be found under arch/arm/boot/ directory.
Build Yocto/Poky rootfs from sources
Note that building an entire distribution is a long process. It also requires a big amount of free disk space.
The support for Atmel AT91 SoC family is included in a particular Yocto layer: meta-atmel. The source for this layer are hosted on Linux4SAM GitHub account![]() : https://github.com/linux4sam/meta-atmel
: https://github.com/linux4sam/meta-atmel![]()
Building environment
A step-by-step comprehensive installation is explained in the Yocto Project Quick Start![]() . The following lines have to be considered as an add-on that is AT91 specific or that can facilitate your setup.
. The following lines have to be considered as an add-on that is AT91 specific or that can facilitate your setup.
Prerequisite
Here are the reference pages for setting up a Yocto building environment: What You Need and How You Get It![]() .
.
Step by step build procedure
![]() here is a copy of the README
here is a copy of the README![]() procedure available directly in the
procedure available directly in the meta-atmel layer. This file in the meta-atmel layer repository must be considered as the reference and the following copy can be out-of-sync.
Supported SoCs / MACHINE names
==============================
- SAMA5D2 product family / sama5d2-xplained
- SAMA5D4 product family / sama5d4ek, sama5d4-xplained
- SAMA5D3 product family / sama5d3xek, sama5d3-xplained
- AT91SAM9x5 product family (AT91SAM9G15, AT91SAM9G25, AT91SAM9X25, AT91SAM9G35 and AT91SAM9X35) / at91sam9x5ek
- AT91SAM9RL / at91sam9rlek
- AT91SAM9G45 / at91sam9m10g45ek
Sources
=======
- meta-atmel
URI: git://github.com/linux4sam/meta-atmel.git
URI: https://github.com/linux4sam/meta-atmel.git
Branch: krogoth
Dependencies
============
This Layer depends on :
- meta-openembedded
URI: git://git.openembedded.org/meta-openembedded
URI: http://cgit.openembedded.org/meta-openembedded/
Branch: krogoth
Optionally:
- meta-qt5
URI: git://github.com/meta-qt5/meta-qt5.git
URI: https://github.com/meta-qt5/meta-qt5
Branch: krogoth
Build procedure
===============
0/ Create a directory
mkdir my_dir
cd my_dir
1/ Clone yocto/poky git repository with the proper branch ready
git clone git://git.yoctoproject.org/poky -b krogoth
2/ Clone meta-openembedded git repository with the proper branch ready
git clone git://git.openembedded.org/meta-openembedded -b krogoth
3/ Clone meta-qt5 git repository with the proper branch ready
git clone git://github.com/meta-qt5/meta-qt5.git -b krogoth
4/ Clone meta-atmel layer with the proper branch ready
git clone git://github.com/linux4sam/meta-atmel.git -b krogoth
5/ Enter the poky directory to configure the build system and start the build process
cd poky
6/ Initialize build directory
source oe-init-build-env build-atmel
7/ Add meta-atmel layer to bblayer configuration file
vim conf/bblayers.conf
# POKY_BBLAYERS_CONF_VERSION is increased each time build/conf/bblayers.conf
# changes incompatibly
POKY_BBLAYERS_CONF_VERSION = "2"
BBPATH = "${TOPDIR}"
BBFILES ?= ""
BSPDIR := "${@os.path.abspath(os.path.dirname(d.getVar(‘FILE‘, True)) + ‘/../../..‘)}"
BBLAYERS ?= " ${BSPDIR}/poky/meta ${BSPDIR}/poky/meta-poky ${BSPDIR}/poky/meta-yocto-bsp ${BSPDIR}/meta-atmel ${BSPDIR}/meta-openembedded/meta-oe ${BSPDIR}/meta-openembedded/meta-networking ${BSPDIR}/meta-openembedded/meta-python ${BSPDIR}/meta-openembedded/meta-ruby ${BSPDIR}/meta-openembedded/meta-multimedia ${BSPDIR}/meta-qt5 "
BBLAYERS_NON_REMOVABLE ?= " ${BSPDIR}/poky/meta ${BSPDIR}/poky/meta-poky "
8/ Edit local.conf to specify the machine, location of source archived, package type (rpm, deb or ipk)
Pick one MACHINE name from the "Supported SoCs / MACHINE names" chapter above
and edit the "local.conf" file. Here is an example:
vim conf/local.conf
[...]
MACHINE ??= "sama5d3-xplained"
[...]
DL_DIR ?= "your_download_directory_path"
[...]
PACKAGE_CLASSES ?= "package_ipk"
[...]
USER_CLASSES ?= "buildstats image-mklibs"
To get better performance, use the "poky-atmel" distribution by also adding that
line:
DISTRO = "poky-atmel"
9/ Build core minimal image
bitbake core-image-minimal
10/ We found that additional local.conf changes are needed for our QT demo
image. You can add these two lines at the end of the file:
vim conf/local.conf
[...]
LICENSE_FLAGS_WHITELIST += "commercial"
SYSVINIT_ENABLED_GETTYS = ""
11/ Build Atmel demo images
bitbake atmel-qt5-demo-image
Typical bitbake output
======================
Build Configuration:
BB_VERSION = "1.30.0"
BUILD_SYS = "x86_64-linux"
NATIVELSBSTRING = "universal"
TARGET_SYS = "arm-poky-linux-gnueabi"
MACHINE = "sama5d2-xplained"
DISTRO = "poky-atmel"
DISTRO_VERSION = "2.1"
TUNE_FEATURES = "arm armv7a vfp thumb neon callconvention-hard cortexa5"
TARGET_FPU = "hard"
meta
meta-poky
meta-yocto-bsp = "krogoth:6c1c01392d91f512e2949ad1d57a75a8077478ba"
meta-atmel = "krogoth:28c4b5d70f3f7df6f8b108a01f621ca0cf23c1a4"
meta-multimedia
meta-networking
meta-python
meta-ruby
meta-oe = "krogoth:abd1795729501a13608da67054b9cbf185404be3"
meta-qt5 = "krogoth:4ec27e218d725677279d265ac1fc256443d665f7"
Using SAM-BA to flash components to board
NAND Flash demo - Memory map

Launch SAM-BA tools
- According to this section make sure that the chip can execute the SAM-BA Monitor.
- Start SAM-BA GUI application.
- Select the board: "at91sama9x35-ek" in the drop-down menu and choose the USB connection.
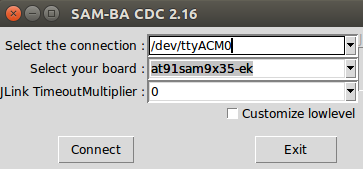
- Click the "Connect" button, the SAM-BA main window show up:
Configure NAND ECC
Using OS default PMECC parameters
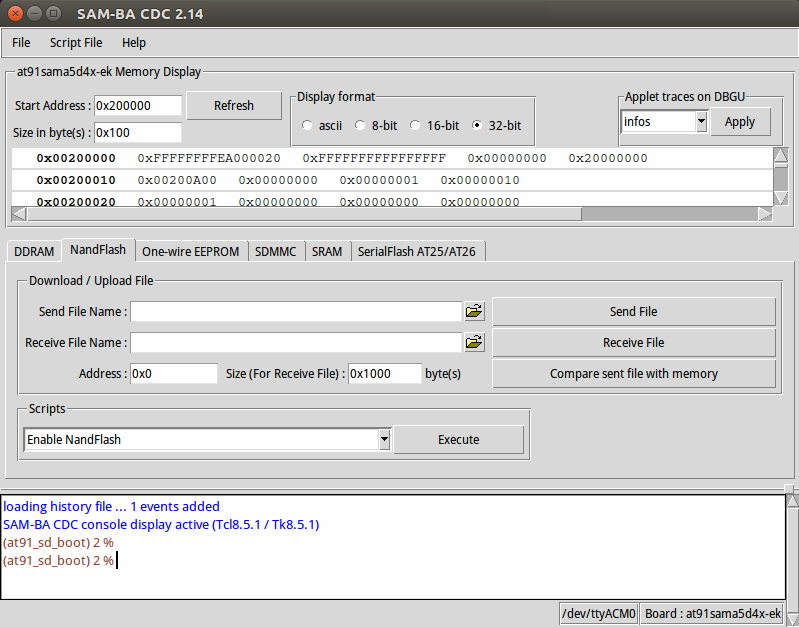
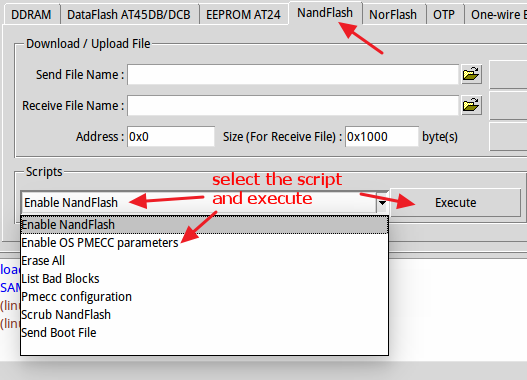
- Choose the NandFlash tab in the SAM-BA GUI interface.
- Initialize the NandFlash by choosing the Enable NandFlash action in the Scripts rolling menu, then press Execute button.
- Enable the PMECC by choosing the Enable OS PMECC parameters action, then press Execute button.
Configure PMECC parameters (optional)
Programming components into NAND
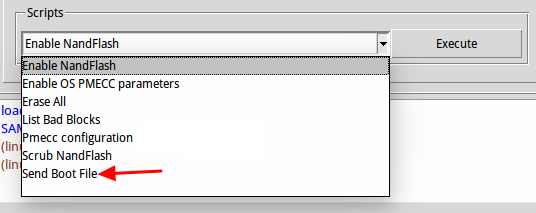
Program AT91Bootstrap binary
- Choose Send Boot File action, then press Execute button to select the at91bootstrap binary file and to program the binary to the NandFlash.
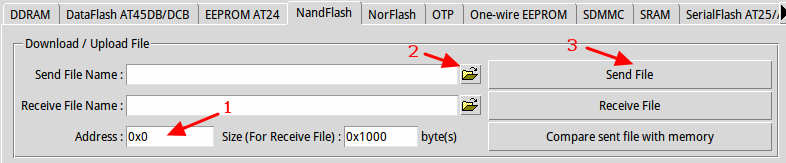
Program U-Boot binary
- Modify the Address to 0x40000
- Choose Send File Name open file dialog and select the U-Boot binary file and to program the binary to the NandFlash.
- Click Send File button to program the binary to the NandFlash in address 0x40000.
Program Linux dtb file
- Modify the Address to 0x180000
- Choose Send File Name open file dialog and select the dtb binary file and to program the binary to the NandFlash.
- Click Send File button to program the binary to the NandFlash in address 0x180000.
Program Linux Kernel file
- Modify the Address to 0x200000
- Choose Send File Name open file dialog and select the Linux kernel binary file and to program the binary to the NandFlash.
- Click Send File button to program the binary to the NandFlash in address 0x200000.
Program rootfs UBI file
Make sure you erased the nand area (0x800000~END of nand) before you program it.
- Modify the Address to 0x800000
- Choose Send File Name open file dialog and select the UBI filesystem binary file and to program the binary to the NandFlash.
- Click Send File button to program the binary to the NandFlash in address 0x800000.
Recent FAQ
- AT91sam9x5-ek boards
-
• Shutdown Wake Up: Use the Wakeup Feature of the Shutdown Controller.. (Kernel, linux-4.4-at91)
• Real Time: Enable Real Time support for AT91SAM9 Soc. (Kernel)
• Yocto Project FAQ: Some Yocto Project FAQ entries. (YoctoProject)
以上是关于sam9x5 sam-ba的主要内容,如果未能解决你的问题,请参考以下文章
C# EntryPointNotFoundException