ROS知识(12)----ActionLib的使用
Posted Make Change
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS知识(12)----ActionLib的使用相关的知识,希望对你有一定的参考价值。
Actionlib是ROS非常重要的库,像执行各种运动的动作,例如控制手臂去抓取一个杯子,这个过程可能复杂而漫长,执行过程中还可能强制中断或反馈信息,这时Actionlib就能大展伸手了。
1.原理
1.1功能
在任何一个比较大的基于ROS的系统,都会有这样的情况,向某个节点发送请求执行某一个任务,并返回相应的执行结果,这种通常用ROS的服务(services)完成。然而,有一些情况服务执行的时间很长,在执行中想要获得任务处理的进度,或可能取消执行任务,Actionlib就能实现这样的功能,它是ROS的一个非常重要的库。可以实现一些简单的状态机功能,算的上是SMACH的一个弱化版。
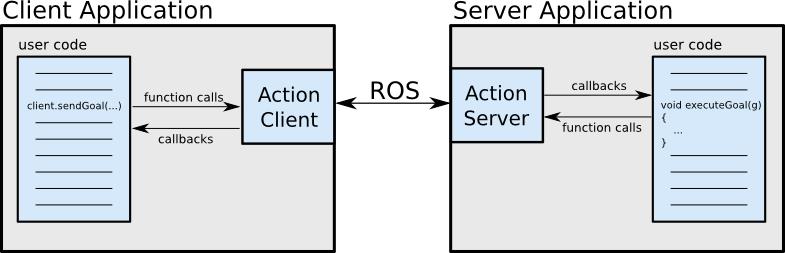
1.2框架
如下图所示, Actionlib的框架实际是一种特殊的客户-服务的模式。除了服务请求的功能外,还可以实时获取服务器执行任务的进度状态,以及强制中断服务的功能。
2.例子
下面以洗碟子为例子,实现客户端调用服务器执行洗盘子的动作。这个例子是官网的一个改进版本,涵盖actionli的基本功能,例如获取服务器执行任务的进度状态,强制终端服务的功能,服务活动状态提示。
2.1服务服务端实现
服务端实现了服务器执行任务的反馈信息,中断抢占功能。具体实现较为简单,反馈信息通过发布反馈的消息实现,中断抢占通过注册中断毁掉函数实现,代码如下:
//这是actionlib的服务端 #include <first_actionlib_sample/DoDishesAction.h> #include <actionlib/server/simple_action_server.h> //这样定义下会用起来简洁许多 typedef actionlib::SimpleActionServer<first_actionlib_sample::DoDishesAction> Server; class DoDishesActionServer { public: DoDishesActionServer(ros::NodeHandle n): server(n, "do_dishes", boost::bind(&DoDishesActionServer::ExecuteCb, this, _1), false) { //注册抢占回调函数 server.registerPreemptCallback(boost::bind(&DoDishesActionServer::preemptCb, this)); } //启动服务 void Start() { server.start(); } //回调函数,在此添加代码实现你要的功能 void ExecuteCb(const first_actionlib_sample::DoDishesGoalConstPtr& goal) { // 在次添加你所要实现的功能 ROS_INFO("Received goal,the dish id is :%d", goal->dishwasher_id); //反馈 first_actionlib_sample::DoDishesFeedback feedback; ros::Rate rate(1); int cur_finished_i = 1; int toal_dish_num = 10; for(cur_finished_i = 1; cur_finished_i <= toal_dish_num; cur_finished_i++) { if(!server.isActive())break; ROS_INFO("Cleanning the dish::%d", cur_finished_i); feedback.percent_complete = cur_finished_i/10.0; server.publishFeedback(feedback); rate.sleep(); } first_actionlib_sample::DoDishesResult result; result.toal_dishes_cleaned = cur_finished_i; if(server.isActive())server.setSucceeded(); } //中断回调函数 void preemptCb() { if(server.isActive()){ server.setPreempted();//强制中断 } } Server server; }; int main(int argc, char** argv) { ros::init(argc, argv, "do_dishes_server"); ros::NodeHandle n; //初始化,绑定回调函数 DoDishesActionServer actionServer(n); //启动服务器,等待客户端信息到来 actionServer.Start(); ros::spin(); return 0; }
2.2客户端实现
客户端注册了三个毁掉函数,DoneCb,ActivCb,FeedbackCb,分别地,DoneCb:用于监听服务器任务执行完后的相应消息以及客户端的相应处理,ActivCb:服务器任务被激活时的消息提示以及客户端的相应处理,FeedbackCb:接收服务器的反馈消息以及客户端的相应处理。代码如下:
//这是actionlib的客户端 #include <first_actionlib_sample/DoDishesAction.h> //#include <actionlib_msgs/GoalStatusArray.h> #include <actionlib/client/simple_action_client.h> //这样定义下会用起来简洁许多 typedef actionlib::SimpleActionClient<first_actionlib_sample::DoDishesAction> Client; class DoDishesActionClient { private: // Called once when the goal completes void DoneCb(const actionlib::SimpleClientGoalState& state, const first_actionlib_sample::DoDishesResultConstPtr& result) { ROS_INFO("Finished in state [%s]", state.toString().c_str()); ROS_INFO("Toal dish cleaned: %i", result->toal_dishes_cleaned); ros::shutdown(); } // 当目标激活的时候,会调用一次 void ActiveCb() { ROS_INFO("Goal just went active"); } // 接收服务器的反馈信息 void FeedbackCb( const first_actionlib_sample::DoDishesFeedbackConstPtr& feedback) { ROS_INFO("Got Feedback Complete Rate: %f", feedback->percent_complete); } public: DoDishesActionClient(const std::string client_name, bool flag = true) : client(client_name, flag) { } //客户端开始 void Start() { //等待服务器初始化完成 client.waitForServer(); //定义要做的目标 first_actionlib_sample::DoDishesGoal goal; goal.dishwasher_id = 1; //发送目标至服务器 client.sendGoal(goal, boost::bind(&DoDishesActionClient::DoneCb, this, _1, _2), boost::bind(&DoDishesActionClient::ActiveCb, this), boost::bind(&DoDishesActionClient::FeedbackCb, this, _1)); //等待结果,时间间隔5秒 client.waitForResult(ros::Duration(10.0)); //根据返回结果,做相应的处理 if (client.getState() == actionlib::SimpleClientGoalState::SUCCEEDED) printf("Yay! The dishes are now clean"); else { ROS_INFO("Cancel Goal!"); client.cancelAllGoals(); } printf("Current State: %s\\n", client.getState().toString().c_str()); } private: Client client; }; int main(int argc, char** argv) { ros::init(argc, argv, "do_dishes_client"); DoDishesActionClient actionclient("do_dishes", true); //启动客户端 actionclient.Start(); ros::spin(); return 0; }
另一个客户端的实现代码基本相同,只是节点的名字有所不同,这里略去,详细实现请查看附件的源码。主要用于测试抢占中断功能。
2.3CMakeLists编写
cmake_minimum_required(VERSION 2.8.3) project(first_actionlib_sample) find_package(catkin REQUIRED COMPONENTS actionlib actionlib_msgs roscpp rospy std_msgs ) ## Generate actions in the \'action\' folder add_action_files( DIRECTORY action FILES DoDishes.action ) ## Generate added messages and services with any dependencies listed here generate_messages( DEPENDENCIES actionlib_msgs# std_msgs ) catkin_package() ########### ## Build ## ########### include_directories( ${catkin_INCLUDE_DIRS} ) ## Declare a C++ executable add_executable(do_dishes_action_client_node src/DoDishesActionClient.cpp) add_executable(do_dishes_action_client_node1 src/DoDishesActionClient1.cpp) add_executable(do_dishes_action_server_node src/DoDishesActionServer.cpp) ## Add cmake target dependencies of the executable ## same as for the library above add_dependencies(do_dishes_action_client_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS}) add_dependencies(do_dishes_action_client_node1 ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS}) add_dependencies(do_dishes_action_server_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS}) ## Specify libraries to link a library or executable target against target_link_libraries(do_dishes_action_client_node ${catkin_LIBRARIES} ) target_link_libraries(do_dishes_action_client_node1 ${catkin_LIBRARIES} ) target_link_libraries(do_dishes_action_server_node ${catkin_LIBRARIES} )
2.4package.xml编写
添加actionlib的编译和执行依赖,如下
<build_depend>actionlib</build_depend>
<build_depend>actionlib_msgs</build_depend>
<run_depend>actionlib</run_depend>
<run_depend>actionlib_msgs</run_depend>
2.5测试
2.5.1 启动
消息反馈和中断抢占的演示,首先启动服务器,然后分别启动两个客户端,执行命令如下:
首先,启动服务器
rosrun first_actionlib_sample do_dishes_action_server_node
然后,启动客户端1
rosrun first_actionlib_sample do_dishes_action_client_node
接着,启动客户端2
rosrun first_actionlib_sample do_dishes_action_client_node1
2.5.2 结果
服务器结果如下:
[ INFO] [1477561873.888082387]: Received goal,the dish id is :1 [ INFO] [1477561876.795322950]: PreemptCb! [ INFO] [1477561876.795370142]: 2 [ INFO] [1477561876.795428811]: Set Preempted! [ INFO] [1477561876.888346882]: Received goal,the dish id is :1 [ INFO] [1477561886.888599364]: 1
客户端1被被客户端2中断结果如下:
[ INFO] [1477561873.888199741]: Goal just went active [ INFO] [1477561873.888272439]: Got Feedback Complete Rate: 0.100000 [ INFO] [1477561874.888483533]: Got Feedback Complete Rate: 0.200000 [ INFO] [1477561875.888816424]: Got Feedback Complete Rate: 0.300000 [ INFO] [1477561876.795693526]: Finished in state [PREEMPTED] [ INFO] [1477561876.795754009]: Toal dish cleaned: 0 Current State: PREEMPTED
客户端2结果显示如下:
[ INFO] [1477561876.888648770]: Goal just went active [ INFO] [1477561876.888753797]: Got Feedback Complete Rate: 0.100000 [ INFO] [1477561877.888792417]: Got Feedback Complete Rate: 0.200000 [ INFO] [1477561878.888906824]: Got Feedback Complete Rate: 0.300000 [ INFO] [1477561879.888699775]: Got Feedback Complete Rate: 0.400000 [ INFO] [1477561880.888896675]: Got Feedback Complete Rate: 0.500000 [ INFO] [1477561881.889008655]: Got Feedback Complete Rate: 0.600000 [ INFO] [1477561882.888785829]: Got Feedback Complete Rate: 0.700000 [ INFO] [1477561883.888789072]: Got Feedback Complete Rate: 0.800000 [ INFO] [1477561884.888667138]: Got Feedback Complete Rate: 0.900000 [ INFO] [1477561885.888919402]: Got Feedback Complete Rate: 1.000000 [ INFO] [1477561886.889587174]: Finished in state [SUCCEEDED] [ INFO] [1477561886.889736499]: Toal dish cleaned: 0 Yay! The dishes are now cleanCurrent State: SUCCEEDED
3.源码
以上是关于ROS知识(12)----ActionLib的使用的主要内容,如果未能解决你的问题,请参考以下文章