凸包(Convex Hull)构造算法——Graham扫描法
Posted 厚礼的博客
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了凸包(Convex Hull)构造算法——Graham扫描法相关的知识,希望对你有一定的参考价值。
凸包(Convex Hull)
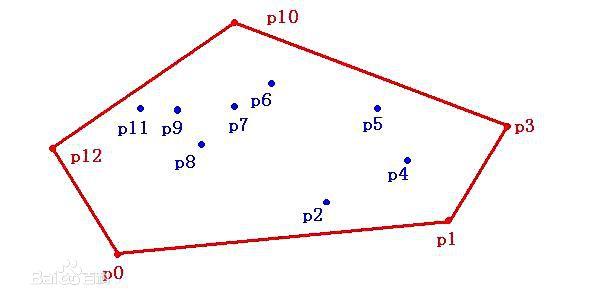
在图形学中,凸包是一个非常重要的概念。简明的说,在平面中给出N个点,找出一个由其中某些点作为顶点组成的凸多边形,恰好能围住所有的N个点。
这十分像是在一块木板上钉了N个钉子,然后用一根绷紧的橡皮筋它们都圈起来,这根橡皮筋的形状就是所谓的凸包。
计算凸包的一个著名算法是Graham Scan法,它的时间复杂度与所采用的排序算法时间复杂度相同,通常采用线性对数算法,因此为\\( O\\left(N\\mathrm{log}\\left(N\\right)\\right) \\)。
1. 找到所有点\\( P_{0,1,...,N-1} \\)中最下方的点,记为\\( P_{L} \\);
2. 计算所有其他的点\\( P_{i}\\left(i\\neq L\\right) \\) 与 \\( P_{L} \\)构成的向量\\( \\overrightarrow{P_{L}P_{i}} \\)相对于水平轴的夹角。因为所有的点都在该\\( P_{L} \\)上方,因此向量的取值范围为\\( \\left(0, 180\\right) \\) ,所以可以用余切值代替角度值;
3. 对所有其他的点按照第2步算出的角度进行排序,且\\( P_{L} \\)为排序后的数组的第0位;
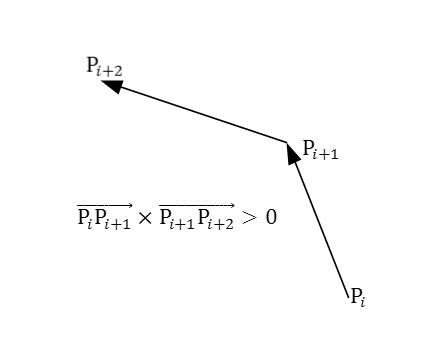
4. 从点\\( P_{L} \\)开始,依此连接每一个点(已经排序过),每连接一个点检测连线的走向是否是逆时针的,如果是则留下该点的前一个点,反之去除前一个点,使之与前面第二个点直接连接,继续这一检测,直到是逆时针或者所有点都被检测过为止。
判断三个点依此连成两条线段走向是否为逆时针,用这两条线段向量的叉积判断:叉积>0,逆时针;反之顺时针或者共线。
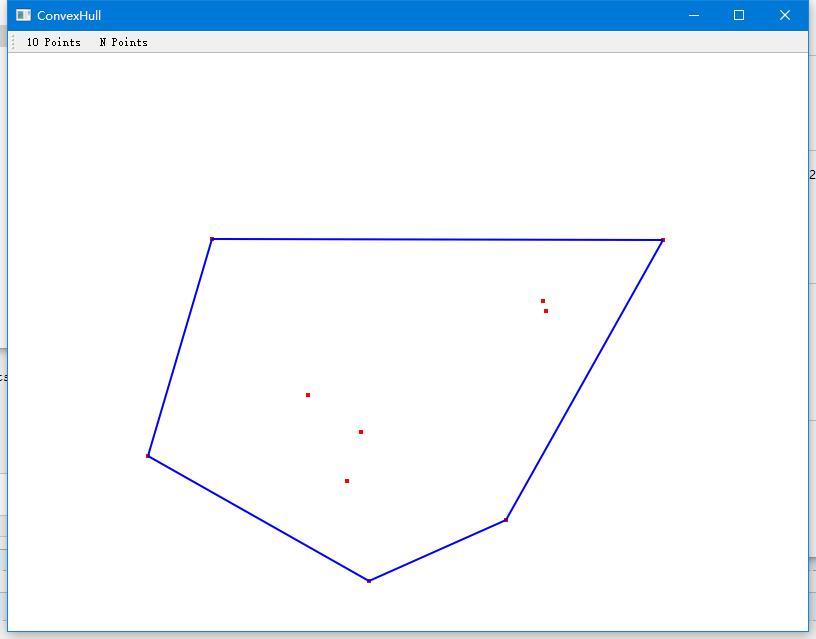
这里采用Qt 5.7实现了一个算法的演示程序,其中算法的部分如下(由于在Qt的坐标系中,y向下增长,因此在计算纵坐标差值时需要取相反数)。
void DisplayWidget::calConvexHull() { int size = m_points.size(); if (size < 3) { return; } // First: find the lowest point int maxY = 0; int indexOfLowest = -1; for (int i = 0; i < size; i++) { if (m_points.at(i).y() > maxY) { maxY = m_points.at(i).y(); indexOfLowest = i; } } std::swap(*m_points.begin(), *(m_points.begin() + indexOfLowest)); QPoint &lowestPoint = *(m_points.begin()); // Second: calculate ctan(angles) double *ctanAngles = new double[size]; for (int i = 1; i < size; i++) { double deltaY = lowestPoint.y() - m_points.at(i).y() + DBL_EPSILON; double deltaX = m_points.at(i).x() - lowestPoint.x(); ctanAngles[i] = deltaX / deltaY; } // Third: Sort subscript int *subscript = new int[size]; for (int i = 1; i < size; i++) { subscript[i] = i; } std::sort(subscript + 1, subscript + size, [ctanAngles](int a1, int a2) { return ctanAngles[a2] < ctanAngles[a1]; }); // Fourth: Calculate convex hull std::vector<QPoint> convexHullPoints; convexHullPoints.push_back(*m_points.begin()); convexHullPoints.push_back(m_points.at(subscript[1])); for (int i = 2; i < size; i++) { convexHullPoints.push_back(m_points.at(subscript[i])); while (convexHullPoints.size() > 3 && !isAnticlockwise(*(convexHullPoints.end() - 3), *(convexHullPoints.end() - 2), *(convexHullPoints.end() - 1))) { *(convexHullPoints.end() - 2) = *(convexHullPoints.end() - 1); convexHullPoints.pop_back(); } } m_convexHullPoints = std::move(convexHullPoints); delete[] ctanAngles; delete[] subscript; }
效果如下:

程序源码:http://files.cnblogs.com/files/HolyChen/ConvexHull.rar
以上是关于凸包(Convex Hull)构造算法——Graham扫描法的主要内容,如果未能解决你的问题,请参考以下文章