B001-Atmega16-数码管
Posted Manon_des_sources
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了B001-Atmega16-数码管相关的知识,希望对你有一定的参考价值。
一步步完成数码管
主要内容:
第一步:产生1ms的时基
第二步:静态显示
第三步:动态扫描
第四步:余晖 重影
第五步:带消息机制的任务函数
第六步:按指定进制显示
-------------------------------------------------------------------------------------------------------------------------------------
开发环境:AVR Studio 4.19 + avr-toolchain-installer-3.4.1.1195-win32.win32.x86
芯片型号:ATmega16
芯片主频:8MHz
-------------------------------------------------------------------------------------------------------------------------------------
第一步: 产生1ms的时基
说明:1、使用定时器0的 CTC中断产生 1ms的时基信号, CTC模式下时自动重装初值、比较方便。
2、使用 OCF0中断、不需要 OC0引脚输出波形。
代码:
Drv_Timer.h中的相关定义:// -------------------
// 定时器中断模式
typedef enum
{
INT_MODE_TOV = 0,
INT_MODE_OCF = 1,
INT_MODE_ICF = 2,
INT_MODE_OCF1A = 3,
INT_MODE_OCF1B = 4
} TIMER_INT_MODE;
// 定时器比较匹配引脚输出模式
typedef enum
{
COM_MODE_NONE = 0,
COM_MODE_TOGGLE = 1,
COM_MODE_CLEAR = 2,
COM_MODE_SET = 3,
} TIMER_COM_MODE;
// 定时器0
typedef enum
{
T0_WGM_NOMAL = 0,
T0_WGM_PHASE_PWM = 1,
T0_WGM_CTC = 2,
T0_WGM_FAST_PWM = 3,
T0_CLK_SOURCE_NONE = 0,
T0_CLK_SOURCE_CLK_1 = 1,
T0_CLK_SOURCE_CLK_8 = 2,
T0_CLK_SOURCE_CLK_64 = 3,
T0_CLK_SOURCE_CLK_256 = 4,
T0_CLK_SOURCE_CLK_1024 = 5,
T0_CLK_SOURCE_T0_FALL = 6,
T0_CLK_SOURCE_T0_RAISE = 7
} TIMER0_MODE;// ==========================================================================================================
// TIMER0 初始化
//
// 参数:wave_mode 工作模式/波形产生模式选择
// OC_mode 比较匹配/PWM输出模式选择
// clk_source 时钟源和预分频选择
//
// 写TCCR0时需要清除bit7=FOC0
//
// 定时器溢出周期 T = ((1.0 / 8000000) * 1000000) * clk_source * 256 ( @ 8MHz )
// ==========================================================================================================
void Drv_Timer0_init(const uint8_t wave_mode, const uint8_t com_mode, const uint8_t clk_source)
{
uint8_t wgm00,wgm01;
wgm00 = wave_mode & 0x01;
wgm01 = (wave_mode & 0x02) >> 1;
// 写TCCR0时需要将bit7=FOC0清0
TCCR0 = (wgm00 << 6)| // 工作模式/波形产生模式选择
(wgm01 << 3)|
((com_mode & 0x03) << 4)| // 比较匹配/PWM输出模式选择
((clk_source & 0x07) << 0); // 时钟源和预分频选择
}
// ==========================================================================================================
// TIMER0 中断使能
//
// 参数:int_mode = INT_MODE_TOV 或 INT_MODE_OCF 或 INT_MODE_ICF
// enable = ENABLE 或 DISABLE
//
// 说明:
// 1、OC0引脚要先配置成比较匹配引脚、再修改数据方向寄存器DDB3
// 2、可以单独使能/禁止一种模式的中断
//
// ==========================================================================================================
void Drv_Timer0_INT_Enable(const uint8_t int_mode, const uint8_t enable)
{
if(INT_MODE_TOV == int_mode)
{
if(DISABLE == enable)
{
TIMSK &= ~(1 << TOIE0);
}
else
{
TIMSK |= (1 << TOIE0);
}
TIFR |= (1 << TOV0);
return ;
}
if(INT_MODE_OCF == int_mode)
{
if(DISABLE == enable)
{
TIMSK &= ~(1 << OCIE0);
}
else
{
TIMSK |= (1 << OCIE0);
}
TIFR |= (1 << OCF0);
}
}
// ==========================================================================================================
// 设置TCNT0和OCR0的值
//
// (1). 在比较匹配下、OCR0需要在TCNT0被设置之后设置
// ==========================================================================================================
void Drv_Timer0_set_TCNT0_OCR0(const uint8_t tcnt0, const uint8_t ocr0)
{
TCNT0 = tcnt0;
OCR0 = ocr0;
}#include <avr/interrupt.h>
#include "Drv_Timer.h"
#include "sys_timer.h"
// ==========================================================================================================
// 系统任务定时器
//
// (1). 使用Timer0产生1ms的时标
// 定时周期 T = ((1.0/8000000)*1000000)*64*(124+1) = 1000us = 1ms
//
// ==========================================================================================================
void sys_timer_init(void)
{
// 定时器0初始化:CTC模式、OC0引脚不连接、64预分频
Drv_Timer0_init(T0_WGM_CTC, COM_MODE_NONE, T0_CLK_SOURCE_CLK_64);
// 设置初值:TCNT0=0、OCR0=122
Drv_Timer0_set_TCNT0_OCR0(0, 122);
// 使能OCF0中断
Drv_Timer0_INT_Enable(INT_MODE_OCF, ENABLE);
}
// ==========================================================================================================
// 系统定时器中断
//
// (1). 使用Timer0的CTC中断调度各个任务
//
// ==========================================================================================================
ISR(TIMER0_COMP_vect)
{
PORTA ^= (1 << PA1); // 使用PA1测试定时周期
}// ==========================================================================================================
// 主函数
// ==========================================================================================================
#include <avr/io.h>
#include "Drv_Timer.h"
#include "system.h"
#include "sys_timer.h"
#include "config.h"
// ==========================================================================================================
// main函数
// ==========================================================================================================
int main(void)
{
// ---------
// 关全局中断
cli();
// 系统初始化 ( 包含sys_timer_init() )
sys_init();
DDRA |= (1 << DDA0) | (1 << DDA1);
PORTA &= ~((1 << PA0 ) | (1 << PA1 ));
// OC0/PB3初始化为输出0
DDRB |= (1 << DDB3);
PORTB &= ~((1 << PB3 ));
// 开全局中断
sei();
// ---------
while(1)
{
}
return 0;
}测试结果:
示波器输出如下: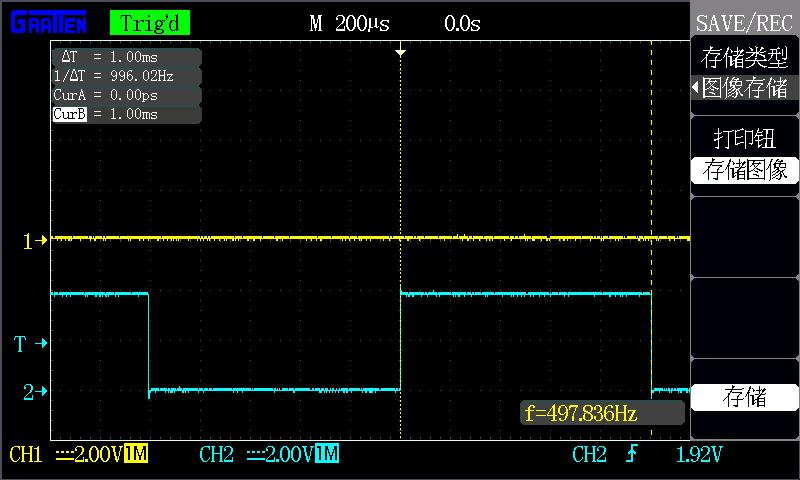
1、 PA1引脚输出方波,周期是 2*1.0ms,引脚电平每隔 1.0ms翻转一次。
使用 OCR0=124、计算得到精确的 1.0ms,但进入中断函数是需要花费时间的。
所以这里使用稍小的 OCR0=122,让从中断产生到进入中断函数为止的时间更精确为 1.0ms
有些计时功能会积累时基的误差、越到后面积累的误差越大,所以这里能精确就尽量做的精确些。
到此、 1.0ms定时完成。
2、 OC0引脚没有波形输出,我们也不需要用到这个引脚,就让他保持普通 IO的特性吧。
-------------------------------------------------------------------------------------------------------------------------------------
第二步: 静态显示
说明:1、这一步需要根据电路图、在指定的数码管上显示指定的符号。
1、数码管驱动电路图:
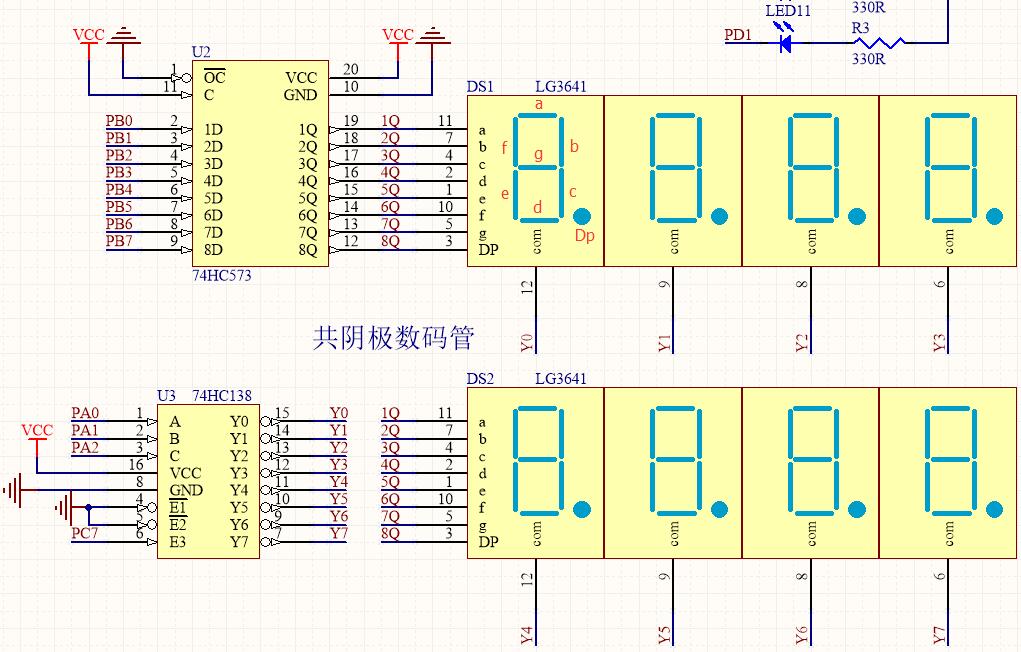
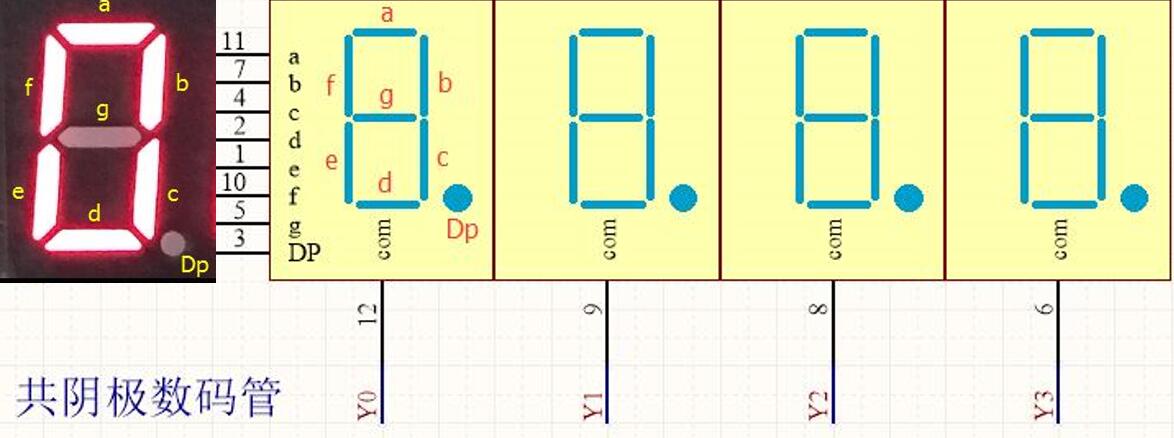
电路中使用的是共阴极数码管:
1个数码管有8个LED,称为8段数码管。
共阴的意思是:
1、8个LED的负极都连接在com引脚
2、8个LED的正极对应8个引脚,编号分别为[Dp,g,f,e,d,c,b,a]
数码管的电压和电流:
点亮1个数码管所需的电流需要查看厂家给的数码管数据手册才知道。
如果没有数据手册,可以预估为10-20mA,电压预估为2V。
和普通LED一样、必要的时候需要加限流电阻。
在动态扫描中、每个数码管都是点亮几毫秒熄灭几十毫秒,并非一直点亮,所以不加限流电阻也行,除非是大电流数码管。
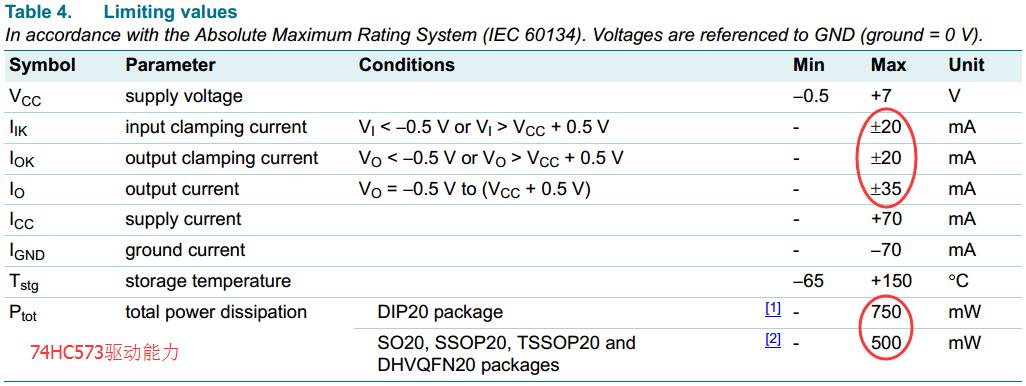
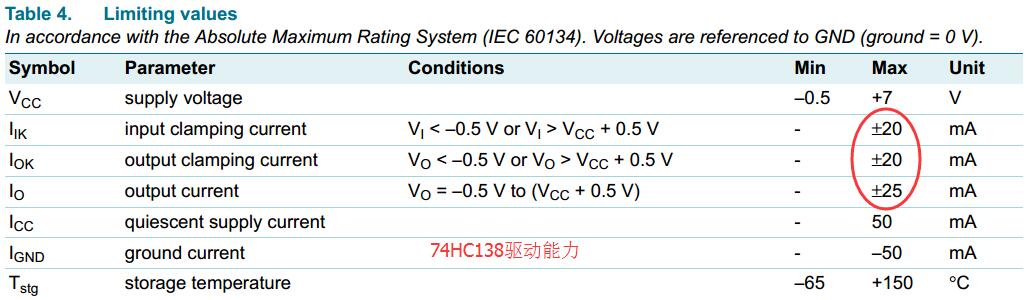
数码管的驱动芯片是74HC138和74HC573,他们的驱动电流足够点亮1个数码管:
2、共阴极数码管的点亮方式:
1、在引脚 a输入高电平,引脚 b-Dp输入低电平,在 com引脚输入低电平。那么,段 [a]被点亮,段 [Dp,g,f,e,d,c,b]都不亮。
也就是说、只有输入状态 为高电平的段会被点亮。
2、在引脚 b、c输入高电平,引脚 a、d-Dp输入低电平,在 com引脚输入低电平。
那么,段 [b,c]被点亮,段 [a,d,e,f,g,Dp]都不亮。
这时得到的图像就是数字 '1'的图像,对应的 段码[Dp,g,f,e,d,c,b,a]=0b00000110=0x06。
3、在引脚 a、b、g、e、d输入高电平,引脚 c、f、Dp输入低电平,在 com引脚输入低电平。
那么,段 [a,b,g,e,d]被点亮,段 [c,f,Dp]都不亮。
这时得到的图像就是数字 '2'的图像,对应的 段码[Dp,g,f,e,d,c,b,a]=0b01011011=0x5B。
4、也就是说、 com口为低电平的数码管被 使能,如果它的 段选中有 不为0的段,这个段就会被 点亮。
3、段码:
1、 16个 十六进制数字[0-9,A-F]的段码如下:static const uint8_t segment_code[17]=
{
0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f, // 0 - 9
0x77,0x7c,0x39,0x5e,0x79,0x71, // A - F
0x00 // 全部熄灭
};在电路中、 74HC573的输出和输入保持一致,同时输出电流。
将这些段码赋予PORTB口就可以在74HC573的输出同样的电平数据,使得段[Dp,g,f,e,d,c,b,a]上得到对应的电平,对应的LED段就被点亮。
4、位选:
1、通过拉低某个数码管的 com口、来 使能这个数码管,这称为位选。8个 com口都连接在 74HC138上,输出为低电平的引脚上连接的数码管将被选中。
74HC138的输入输出表如下:
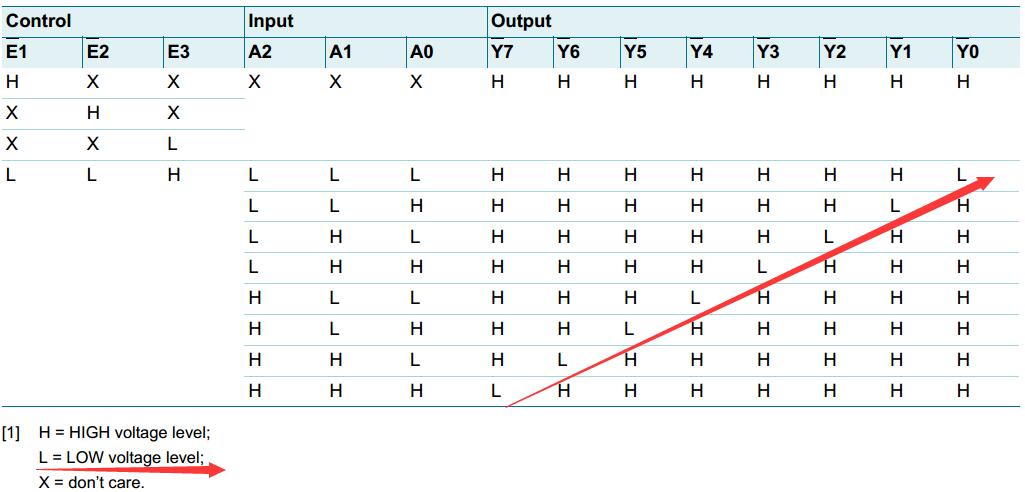
在电路中,使用PORTA[2:0]来对应74HC138的输入[A2,A0]。
74HC138的输入[A2,A0]映射到PORTA[2:0]就是下面的数组,用来分别使能第0位到第7位数码管:
static const uint8_t segment_index[8]= { 0,1,2,3,4,5,6,7 };5、代码:
下面的代码用来在第0号数码管上、显示数字"5"。
Mod_LED_display.c:
#include <avr/interrupt.h>
#include "Mod_LED_Displayer.h"
// 段码(共阴 == 高电平点亮)
static const uint8_t segment_code[17]=
{
0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f, // 0 - 9
0x77,0x7c,0x39,0x5e,0x79,0x71, // A - F
0x00 // 全部熄灭
};
// 位码(低电平使能)(使用74HC138选通位选)
// 分别使能第0号到第7号数码管(与之相与(&)来使能)
static const uint8_t segment_index[8]= { 0,1,2,3,4,5,6,7 };
// ==========================================================================================================
// LED数码管硬件初始化
//
// ==========================================================================================================
void Mod_LED_display_init(void)
{
// 数码位选选使能(74HC138芯片使能)
DDRC |= (1 << DDC7);
PORTC |= (1 << PC7 );
// 段选控制:PORTB初始化为:输出低电平
DDRB = 0xFF;
PORTB = 0x00;
// 位选控制:PORTA[2:0]初始化为:输出低电平(选中第0号数码管)
DDRA |= (1 << DDA0) |(1 << DDA1) |(1 << DDA2);
PORTA &= ~((1 << PA0 ) |(1 << PA1 ) |(1 << PA2 ));
// LED数码管显示固定的数据 ------------------------
// 清除数码管显示
PORTB = segment_code[16];
// 修改位选
PORTA |= segment_index[7];
PORTA &= segment_index[0]; // 第0号数码管
// 修改显示
PORTB = segment_code[5]; // 数字'5'
}main.c:
// ==========================================================================================================
// 主函数
// ==========================================================================================================
#include <avr/io.h>
#include "Mod_LED_Displayer.h"
#include "sys_timer.h"
#include "system.h"
#include "config.h"
// ==========================================================================================================
// main函数
// ==========================================================================================================
int main(void)
{
// ---------
// 关全局中断
cli();
// 系统初始化 ( 包含Mod_LED_display_init() )
sys_init();
// 开全局中断
sei();
// ---------
while(1)
{
}
return 0;
}测试结果:
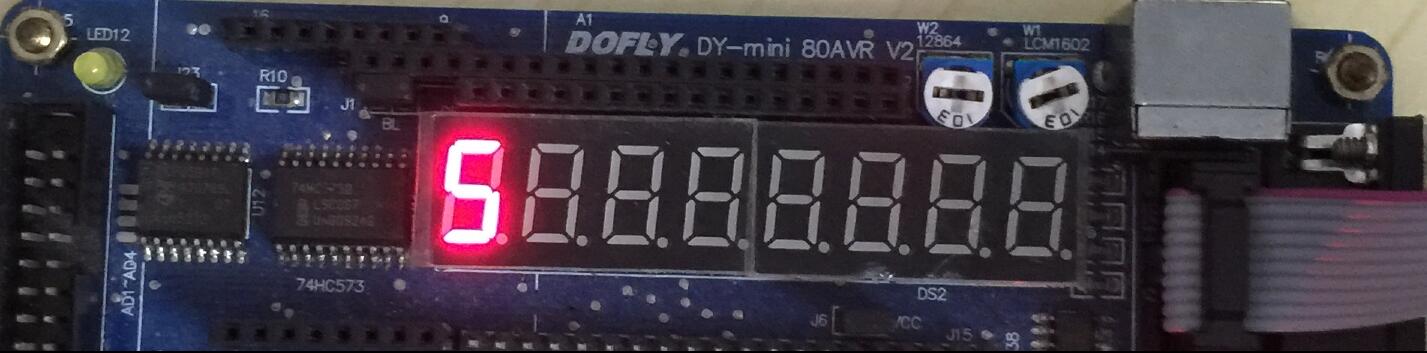
1、现在可以在任一个数码管上、显示任一个十六进制数了。
-------------------------------------------------------------------------------------------------------------------------------------
第三步: 动态扫描
说明:1、由静态显示到动态扫描经过了以下步骤:
(1). 在第一步的1ms定时中断中、每隔1000ms在第0号数码管上显示1个数字,
并依次循环显示16个十六进制数,检验所有段码。
(2). 在第一步的1ms定时中断中、每隔1000ms切换到下一个数码管,去显示一个固定的数字,
并依次循环切换这8个数码管,检验所有 位码。(3). 让8位数码管动态显示数值01234567。
也就是切换到第0号数码管时、显示数字'0',后面的一次类推,每隔1ms切换一个数码管。
(4). 最后、让让8位数码管动态显示任意数值,超过8位的数值当然只能显示低8位(十进制)。
最终的代码经过了几次构造,以方便修改用于控制数码管的IO口。
代码如下:
Mod_LED_display.c:
#include <avr/interrupt.h>
#include "Mod_LED_Displayer.h"
// 段码(共阴 == 高电平点亮)
static const uint8_t segment_code[17]=
{
0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f, // 0 - 9
0x77,0x7c,0x39,0x5e,0x79,0x71, // A - F
0x00 // 全部熄灭
};
// 位码(低电平使能)(使用74HC138选通位选)
// 分别使能第0号到第7号数码管(与之相与(&)来使能)
static const uint8_t segment_index[8]= { 0,1,2,3,4,5,6,7 };
// 数码管控制结构
typedef struct
{
uint8_t *seg_index; // 位选端口的数据
uint8_t *seg_code; // 段选端口的数据
uint8_t index; // 使能第index数码管
uint8_t data[sizeof(segment_index)]; // 送给[0:7]号数码管去显示的8个数据
}T_SEG_LED_DISPLAY_CTRL,*pT_SEG_LED_DISPLAY_CTRL;
static T_SEG_LED_DISPLAY_CTRL LED_display_ctrl = { .seg_index = (uint8_t *)(&PORTA),
.seg_code = (uint8_t *)(&PORTB),
.index = 0,
.data = { 0,1,2,3,4,5,6,7 }
};
// 使用指针是为了在代码中使用'->'操作符来替代'.'操作符,更直观
static pT_SEG_LED_DISPLAY_CTRL p_LED_display_ctrl = &LED_display_ctrl;
// ==========================================================================================================
// LED数码管硬件初始化
//
// ==========================================================================================================
void Mod_LED_display_init(void)
{
// -----------------------------
// 数码管位选使能(74HC138芯片使能)
DDRC |= (1 << DDC7);
PORTC |= (1 << PC7 );
// 段选控制:PORTB初始化为:输出低电平
DDRB = 0xFF;
PORTB = 0x00;
// 位选控制:PORTA[2:0]初始化为:输出低电平(选中第0号数码管)
DDRA |= (1 << DDA0) |(1 << DDA1) | (1 << DDA2);
PORTA &= ~((1 << PA0 ) |(1 << PA1 ) | (1 << PA2 ));
}
// ==========================================================================================================
// LED数码管显示数据的刷新
//
// (1). 在系统定时器中每隔1ms刷新1次
//
// ==========================================================================================================
void Mod_LED_display_update(void)
{
#if 1
// 熄灭当前数码管、用来避免余晖
*p_LED_display_ctrl->seg_code = segment_code[sizeof(segment_code) - 1];
#endif
// 切换到下1个数码管
p_LED_display_ctrl->index++;
if(p_LED_display_ctrl->index > (sizeof(segment_index) - 1))
{
p_LED_display_ctrl->index = 0;
}
// 修改位选、修改显示
*p_LED_display_ctrl->seg_index |= segment_index[sizeof(segment_index) - 1];
*p_LED_display_ctrl->seg_index &= segment_index[p_LED_display_ctrl->index];
*p_LED_display_ctrl->seg_code = segment_code[p_LED_display_ctrl->data[segment_index[p_LED_display_ctrl->index]]];
}
// ==========================================================================================================
// LED数码管显示(十进制)
//
// ==========================================================================================================
void Mod_LED_display(uint32_t data)
{
uint8_t temp = 0;
uint8_t index = 0;
for(index = 0; index < sizeof(segment_index); index++)
{
// 取出最低位的数据
if(0 == data) { temp = 0; }
else { temp = data % 10UL; }
// 保存最低位的数据
p_LED_display_ctrl->data[sizeof(segment_index) - index - 1] = temp;
// 丢弃最低位的数据
if(0 != data) { data = data / 10UL; }
}
}
// ==========================================================================================================
// LED数码管显示(进制)
//
// 1、可以显示十六进制、以及十六进制以内的进制
//
// ==========================================================================================================
void Mod_LED_display_hex(uint32_t data, uint8_t hex)
{
uint8_t temp = 0;
uint8_t index = 0;
if((hex > 16) || (hex < 2)) { return ; }
for(index = 0; index < sizeof(segment_index); index++)
{
if(0 == data) { temp = 0; }
else { temp = data % hex; }
p_LED_display_ctrl->data[sizeof(segment_index) - index - 1] = temp;
if(0 != data) { data = data / hex; }
}
}在sys_timer.c中,每隔1ms刷新一次数码管:
// ==========================================================================================================
// 系统定时器中断(中断周期=1ms)
//
// (1). 使用Timer0的CTC中断调度各个任务
//
// ==========================================================================================================
ISR(TIMER0_COMP_vect)
{
Mod_LED_display_update();
}// ==========================================================================================================
// 主函数
// ==========================================================================================================
#include <avr/io.h>
#include "Mod_LED_Displayer.h"
#include "sys_timer.h"
#include "system.h"
#include "config.h"
// ==========================================================================================================
// main函数
// ==========================================================================================================
int main(void)
{
// ---------
// 关全局中断
cli();
// 系统初始化
sys_init();
// 开全局中断
sei();
Mod_LED_display(123456789);
// Mod_LED_display_hex(65536, 15);
// -----------------------
while(1)
{
}
return 0;
}测试结果:

1、显示中没有余晖(重影),不亮的段都是白色。
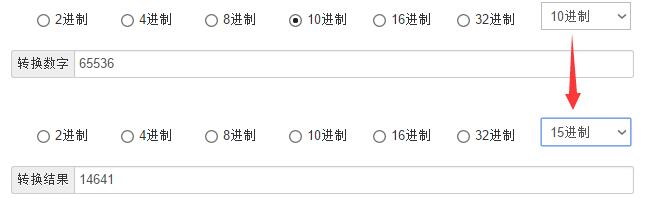
2、操作函数中还提供了一个根据指定的进制来保存和显示数字的函数Mod_LED_display_hex()。
比如Mod_LED_display_hex(65536, 15);就是将十进制数65536按照15进制保存、并显示在数码管上。
数码管上将显示15进制数14641,可以在线进行进制转换、来验证结果:http://tool.oschina.net/hexconvert。
在线转换的结果:
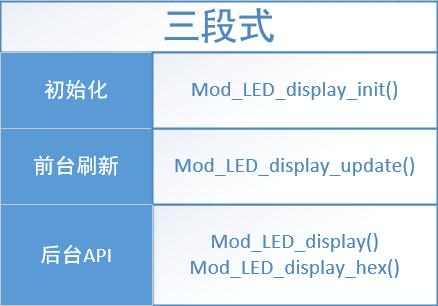
3、这里对数码管的操作是一种三段式的操作:初始化 + 前台更新 + 后台API。
第四步: 余晖 (重影)
以上是关于B001-Atmega16-数码管的主要内容,如果未能解决你的问题,请参考以下文章