深度学习-最优化笔记
Posted 小萝、卜
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了深度学习-最优化笔记相关的知识,希望对你有一定的参考价值。
链接:https://zhuanlan.zhihu.com/p/21360434
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
译者注:本文智能单元首发,译自斯坦福CS231n课程笔记Optimization Note,课程教师Andrej Karpathy授权翻译。本篇教程由杜客翻译完成,堃堃和李艺颖进行校对修改。译文含公式和代码,建议PC端阅读。
原文如下
内容列表:
- 简介
- 损失函数可视化
- 最优化
- 策略#1:随机搜索
- 策略#2:随机局部搜索
- 策略#3:跟随梯度 译者注:上篇截止处
- 梯度计算
- 使用有限差值进行数值计算
- 微分计算梯度
- 梯度下降
- 小结
简介
在上一节中,我们介绍了图像分类任务中的两个关键部分:
- 基于参数的评分函数。该函数将原始图像像素映射为分类评分值(例如:一个线性函数)。
- 损失函数。该函数能够根据分类评分和训练集图像数据实际分类的一致性,衡量某个具体参数集的质量好坏。损失函数有多种版本和不同的实现方式(例如:Softmax或SVM)。
上节中,线性函数的形式是,而SVM实现的公式是:
对于图像数据,如果基于参数集
做出的分类预测与真实情况比较一致,那么计算出来的损失值
就很低。现在介绍第三个,也是最后一个关键部分:最优化Optimization。最优化是寻找能使得损失函数值最小化的参数
的过程。
铺垫:一旦理解了这三个部分是如何相互运作的,我们将会回到第一个部分(基于参数的函数映射),然后将其拓展为一个远比线性函数复杂的函数:首先是神经网络,然后是卷积神经网络。而损失函数和最优化过程这两个部分将会保持相对稳定。
损失函数可视化
本课中讨论的损失函数一般都是定义在高维度的空间中(比如,在CIFAR-10中一个线性分类器的权重矩阵大小是[10x3073],就有30730个参数),这样要将其可视化就很困难。然而办法还是有的,在1个维度或者2个维度的方向上对高维空间进行切片,就能得到一些直观感受。例如,随机生成一个权重矩阵,该矩阵就与高维空间中的一个点对应。然后沿着某个维度方向前进的同时记录损失函数值的变化。换句话说,就是生成一个随机的方向
并且沿着此方向计算损失值,计算方法是根据不同的
值来计算
。这个过程将生成一个图表,其x轴是
值,y轴是损失函数值。同样的方法还可以用在两个维度上,通过改变
来计算损失值
,从而给出二维的图像。在图像中,
可以分别用x和y轴表示,而损失函数的值可以用颜色变化表示:
————————————————————————————————————————
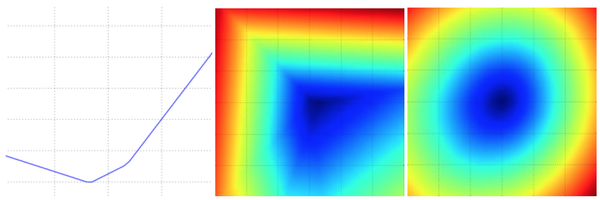 一个无正则化的多类SVM的损失函数的图示。左边和中间只有一个样本数据,右边是CIFAR-10中的100个数据。左:a值变化在某个维度方向上对应的的损失值变化。中和右:两个维度方向上的损失值切片图,蓝色部分是低损失值区域,红色部分是高损失值区域。注意损失函数的分段线性结构。多个样本的损失值是总体的平均值,所以右边的碗状结构是很多的分段线性结构的平均(比如中间这个就是其中之一)。
一个无正则化的多类SVM的损失函数的图示。左边和中间只有一个样本数据,右边是CIFAR-10中的100个数据。左:a值变化在某个维度方向上对应的的损失值变化。中和右:两个维度方向上的损失值切片图,蓝色部分是低损失值区域,红色部分是高损失值区域。注意损失函数的分段线性结构。多个样本的损失值是总体的平均值,所以右边的碗状结构是很多的分段线性结构的平均(比如中间这个就是其中之一)。
—————————————————————————————————————————
我们可以通过数学公式来解释损失函数的分段线性结构。对于一个单独的数据,有损失函数的计算公式如下:
通过公式可见,每个样本的数据损失值是以为参数的线性函数的总和(零阈值来源于
函数)。
的每一行(即
),有时候它前面是一个正号(比如当它对应错误分类的时候),有时候它前面是一个负号(比如当它是是正确分类的时候)。为进一步阐明,假设有一个简单的数据集,其中包含有3个只有1个维度的点,数据集数据点有3个类别。那么完整的无正则化SVM的损失值计算如下:
因为这些例子都是一维的,所以数据和权重
都是数字。观察
,可以看到上面的式子中一些项是
的线性函数,且每一项都会与0比较,取两者的最大值。可作图如下:——————————————————————————————————————
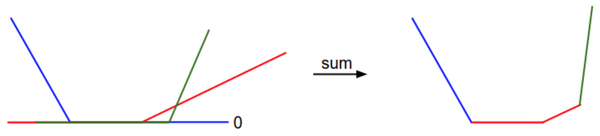 从一个维度方向上对数据损失值的展示。x轴方向就是一个权重,y轴就是损失值。数据损失是多个部分组合而成。其中每个部分要么是某个权重的独立部分,要么是该权重的线性函数与0阈值的比较。完整的SVM数据损失就是这个形状的30730维版本。
从一个维度方向上对数据损失值的展示。x轴方向就是一个权重,y轴就是损失值。数据损失是多个部分组合而成。其中每个部分要么是某个权重的独立部分,要么是该权重的线性函数与0阈值的比较。完整的SVM数据损失就是这个形状的30730维版本。
——————————————————————————————————————
需要多说一句的是,你可能根据SVM的损失函数的碗状外观猜出它是一个凸函数。关于如何高效地最小化凸函数的论文有很多,你也可以学习斯坦福大学关于(凸函数最优化)的课程。但是一旦我们将函数扩展到神经网络,目标函数就就不再是凸函数了,图像也不会像上面那样是个碗状,而是凹凸不平的复杂地形形状。
不可导的损失函数。作为一个技术笔记,你要注意到:由于max操作,损失函数中存在一些不可导点(kinks),这些点使得损失函数不可微,因为在这些不可导点,梯度是没有定义的。但是次梯度(subgradient)依然存在且常常被使用。在本课中,我们将交换使用次梯度和梯度两个术语。
最优化 Optimization
重申一下:损失函数可以量化某个具体权重集W的质量。而最优化的目标就是找到能够最小化损失函数值的W 。我们现在就朝着这个目标前进,实现一个能够最优化损失函数的方法。对于有一些经验的同学,这节课看起来有点奇怪,因为使用的例子(SVM 损失函数)是一个凸函数问题。但是要记得,最终的目标是不仅仅对凸函数做最优化,而是能够最优化一个神经网络,而对于神经网络是不能简单的使用凸函数的最优化技巧的。
策略#1:一个差劲的初始方案:随机搜索
既然确认参数集W的好坏蛮简单的,那第一个想到的(差劲)方法,就是可以随机尝试很多不同的权重,然后看其中哪个最好。过程如下:
# 假设X_train的每一列都是一个数据样本(比如3073 x 50000)
# 假设Y_train是数据样本的类别标签(比如一个长50000的一维数组)
# 假设函数L对损失函数进行评价
bestloss = float("inf") # Python assigns the highest possible float value
for num in xrange(1000):
W = np.random.randn(10, 3073) * 0.0001 # generate random parameters
loss = L(X_train, Y_train, W) # get the loss over the entire training set
if loss < bestloss: # keep track of the best solution
bestloss = loss
bestW = W
print ‘in attempt %d the loss was %f, best %f‘ % (num, loss, bestloss)
# 输出:
# in attempt 0 the loss was 9.401632, best 9.401632
# in attempt 1 the loss was 8.959668, best 8.959668
# in attempt 2 the loss was 9.044034, best 8.959668
# in attempt 3 the loss was 9.278948, best 8.959668
# in attempt 4 the loss was 8.857370, best 8.857370
# in attempt 5 the loss was 8.943151, best 8.857370
# in attempt 6 the loss was 8.605604, best 8.605604
# ... (trunctated: continues for 1000 lines)
在上面的代码中,我们尝试了若干随机生成的权重矩阵W,其中某些的损失值较小,而另一些的损失值大些。我们可以把这次随机搜索中找到的最好的权重W取出,然后去跑测试集:
# 假设X_test尺寸是[3073 x 10000], Y_test尺寸是[10000 x 1]
scores = Wbest.dot(Xte_cols) # 10 x 10000, the class scores for all test examples
# 找到在每列中评分值最大的索引(即预测的分类)
Yte_predict = np.argmax(scores, axis = 0)
# 以及计算准确率
np.mean(Yte_predict == Yte)
# 返回 0.1555
验证集上表现最好的权重W跑测试集的准确率是15.5%,而完全随机猜的准确率是10%,如此看来,这个准确率对于这样一个不经过大脑的策略来说,还算不错嘛!
核心思路:迭代优化。当然,我们肯定能做得更好些。核心思路是:虽然找到最优的权重W非常困难,甚至是不可能的(尤其当W中存的是整个神经网络的权重的时候),但如果问题转化为:对一个权重矩阵集W取优,使其损失值稍微减少。那么问题的难度就大大降低了。换句话说,我们的方法从一个随机的W开始,然后对其迭代取优,每次都让它的损失值变得更小一点。
我们的策略是从随机权重开始,然后迭代取优,从而获得更低的损失值。
蒙眼徒步者的比喻:一个助于理解的比喻是把你自己想象成一个蒙着眼睛的徒步者,正走在山地地形上,目标是要慢慢走到山底。在CIFAR-10的例子中,这山是30730维的(因为W是3073x10)。我们在山上踩的每一点都对应一个的损失值,该损失值可以看做该点的海拔高度。
策略#2:随机本地搜索
第一个策略可以看做是每走一步都尝试几个随机方向,如果某个方向是向山下的,就向该方向走一步。这次我们从一个随机开始,然后生成一个随机的扰动
,只有当
的损失值变低,我们才会更新。这个过程的具体代码如下:
W = np.random.randn(10, 3073) * 0.001 # 生成随机初始W
bestloss = float("inf")
for i in xrange(1000):
step_size = 0.0001
Wtry = W + np.random.randn(10, 3073) * step_size
loss = L(Xtr_cols, Ytr, Wtry)
if loss < bestloss:
W = Wtry
bestloss = loss
print ‘iter %d loss is %f‘ % (i, bestloss)
使用同样的数据(1000),这个方法可以得到21.4%的分类准确率。这个比策略一好,但是依然过于浪费计算资源。
策略#3:跟随梯度
前两个策略中,我们是尝试在权重空间中找到一个方向,沿着该方向能降低损失函数的损失值。其实不需要随机寻找方向,因为可以直接计算出最好的方向,这就是从数学上计算出最陡峭的方向。这个方向就是损失函数的梯度(gradient)。在蒙眼徒步者的比喻中,这个方法就好比是感受我们脚下山体的倾斜程度,然后向着最陡峭的下降方向下山。
在一维函数中,斜率是函数在某一点的瞬时变化率。梯度是函数的斜率的一般化表达,它不是一个值,而是一个向量。在输入空间中,梯度是各个维度的斜率组成的向量(或者称为导数derivatives)。对一维函数的求导公式如下:
当函数有多个参数的时候,我们称导数为偏导数。而梯度就是在每个维度上偏导数所形成的向量。
最优化笔记(上)完。
译者反馈
- 转载须全文转载并注明原文链接,否则保留维权权利;
- 请知友们通过评论和私信等方式批评指正,贡献者均会补充提及。
以上是关于深度学习-最优化笔记的主要内容,如果未能解决你的问题,请参考以下文章