ADAS虚拟车道边界生成
Posted 吴建明
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ADAS虚拟车道边界生成相关的知识,希望对你有一定的参考价值。
ADAS虚拟车道边界生成
Virtual Lane Boundary Generation for Human-Compatible Autonomous Driving: A Tight Coupling between Perception and Planning
论文地址:
http://faculty.cs.tamu.edu/dzsong/pdfs/Binbin_LDRGT_IROS2019_V19.pdf
摘要
现有的无人驾驶(AV)导航算法将车道识别,避障,局部路径规划和车道跟踪视为单独的功能模块,从而导致驾驶行为与人类驾驶员不兼容。必须设计与人类兼容的导航算法以确保运输安全。开发了一个新的紧密耦合的感知计划框架,该框架结合了所有这些功能以确保人类兼容。使用GPS-相机-激光雷达传感器融合,可以检测实际车道边界(ALB),并提出可用性,合理性,可行性(ARF)三重测试,以确定应该生成虚拟车道边界(VLB)还是遵循ALB。如果需要,可以使用动态可调的多目标优化框架来生成VLB,该框架考虑了避障,轨迹平滑度(满足车辆运动动力学约束),轨迹连续性(避免突然运动),GPS跟踪质量(执行全局计划)以及车道跟随或部分方向跟随(达到人类期望)。因此,车辆运动比现有方法更具人类兼容性。已经实现了算法,并在开源数据下进行了测试,结果令人满意。
贡献
1. 提出了一个新的紧密耦合的感知计划框架,以提高人类的适应性。
2. 使用GPS-相机-雷达多模式传感器融合,可以检测实际的车道边界(ALB),并提出可用性-共振能力可行性测试,以确定是否应该生成虚拟车道边界(VLB)还是遵循ALB。
3. 必要时,可使用可动态调整的多目标优化框架生成VLB,该框架考虑避障,轨迹平滑度(满足车辆动力学动力学约束),轨迹连续性(避免突然运动),GPS跟踪质量(执行全局计划)和车道跟踪或部分跟随(以满足人类期望)。由此产生的轨迹比现有方法更具人类兼容性。
4. 随着越来越多的公司发展自主车辆(AVs),重要的是确保AVs的行为与人类相容,因为AVs将在未来的岁月里与人类司机共享道路。当为AV计划运动时,可以调整速度和许多可能的轨道,但并非所有的计划都能保证人的相容性,需要理解人工决策过程。人类司机比处理复杂情况时的视听设备。人力司机可避开障碍物并仍遵守车道标线(LMs)在很大程度上是交通锥。人类司机可以在适当的场景中覆盖车道边界(LBs):车道标记(LMs)可能消失或被施工堵塞或停放车辆,LMs可能与行驶方向,车辆可能行驶过快,因此暂时无法跟上LMs等。事实上,感知之间存在着紧密的耦合用于场景理解和运动规划,包括在多个目标下寻找最优轨迹。
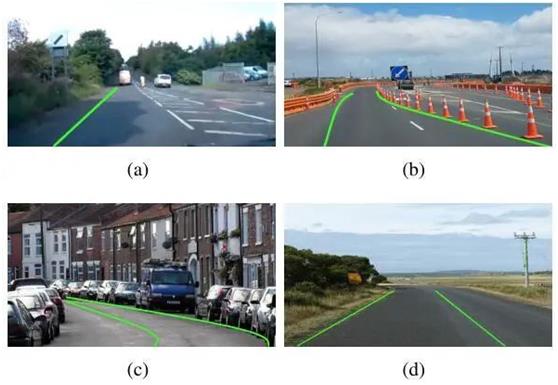
图1 生成用于自动驾驶的虚拟车道边界,以确保在复杂的道路条件下实现人类兼容驾驶:(a)当前车道缺少左侧车道边界,(b)交通锥改变了道路,(c)停放的汽车阻塞了街道,(d)有完全没有LM。绿色曲线是的算法生成的VLB(最好以彩色显示)。

图2 系统图。实心星形表示姿势估计的输出,它也是连续LB生成和LB投影的输入。

图3 六种不同场景的示例算法输出(最好以彩色显示)。
示例输出如图3所示。绿色面具,面积是算法检测到的自由空间。很明显这条路指向,谷歌地图太糟糕了,不能直接用来导航,如紫色线条质量差所示的指南。什么时候?比较的算法输出和GPS记录,人类驾驶,蓝线与图3(e)中唯一例外的红线。注意红色,由于轨迹不同,直线超出蓝线,长度并不意味着他们不同意。甚至在图3(e)中,蓝线和红线都是可行的选择。在任何情况下算法都可以生成符合人类的期望。

表1 VLBS上的KITTI数据集

图4 不同组成部分对LCC成本的贡献。
Conclusion
本文开发的一种新的紧密耦合,使AVs能够考虑的感知和规划框架,同时产生多个相互冲突的目标,与人类相容的导航轨迹。利用激光雷达探测自由空间的前期工作,融合和建议的ARF测试来确定AV,应该简单地遵循ALBs或者通过将车辆动力学约束、避障,平稳运动,GPS轨迹跟踪,多目标优化框架中的LMs,针对不同道路场景的动态可调权重。本文的算法和测试结果,确认了设计方案。今后将进行更多的物理实验, 加入更多的功能,如速度,计划做出更人性化的导航决策与人类相容。
以上是关于ADAS虚拟车道边界生成的主要内容,如果未能解决你的问题,请参考以下文章
车道线识别基于matlab hough变换道路检测直线检测含Matlab源码 2074期