MachineLearning:感知器perception算法
Posted coding如逆水行舟
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了MachineLearning:感知器perception算法相关的知识,希望对你有一定的参考价值。
简介
50年代末 F.Rosenblatt提出感知器算法。线性分类器的设计就是利用训练样本来计算线性函数的权向量
问题
设有两类问题的判别函数
g(X)=w1x1+w2x2+w3=0
训练样本XA,XB∈ω1, XC,XD∈ω2则
g(XA)>0,g(XB)>0
g(XC)<0,g(XD)<0
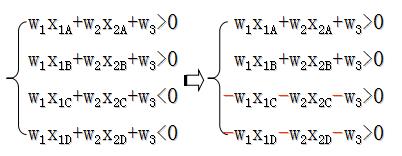
即:
WX>0
其中:
 权向量
权向量
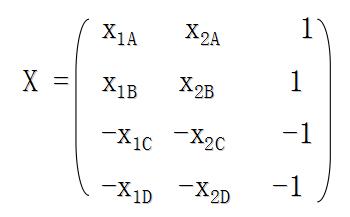 各样本特征向量的增1矩阵
各样本特征向量的增1矩阵
该线性联立不等式只对线性可分问题有解,且是多解,因而只有按不同条件取最优解
赏-罚训练算法是一个迭代过程:
1)取权向量W(1)为任一初始值;
2)用训练集X对W进行迭代,在第k步
3)如Xk∈ ω1 且 Wt(k)X(k) ≤ 0
如Xk∈ ω2 且 Wt(k)X(k) ≥ 0。则惩罚:
W(k+1)=W(k)+f(X)
直之无惩罚
#即要设计一个f(X)随着迭代达到最小
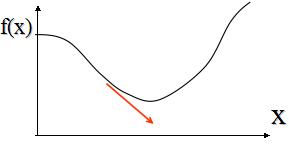
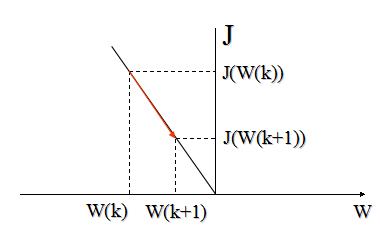
确定f(X)的感知器算法的梯度法,是使得f(X)越迭代越小最后收敛为“0”(梯度下降法)
设f(X)是向量
X=(x1,x2…xn)
的函数,其梯度向量为

它的方向指向自变量(x1,x2…xn)增大时函数f(X)最大增大率方向,反之,负梯度指向f的最陡下降方向。
F.Rosenblett 提出的准则函数
J(W,X)=C1(|WtX|−WtX)
W(k+1)=W(k)−C2▽J
C2为有助收敛的校正系数
这样把求线性不等式组转化为一个使函数J极小化,也就是使
▽J=0
。
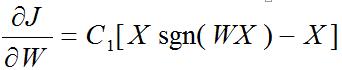
其中
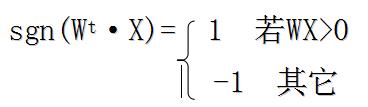
公式表示:
注意
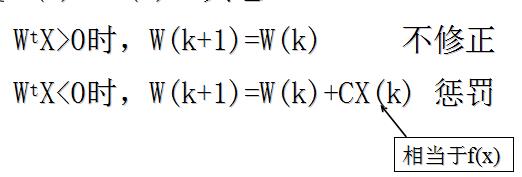
原不等式是对第二类样本的特征向量引如符号后得到的,如不引入负号,则算法为:
如
Xk∈ω1且Wt(k)X(k)>0或
Xk∈ω2且Wt(k)X(k)<0
则不需要修正 反之,须予以“惩罚”:
若
Xk∈ω1且Wt(k)X(k)<=0
则
W(k+1)=W(k)+CX(k)
若
Xk∈ω2且Wt(k)X(k)>=0
则
W(k+1)=W(k)−CX(k)
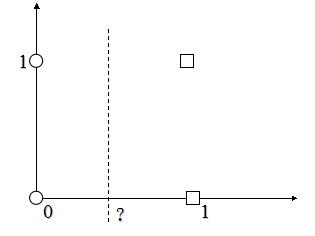
例子
例:有4个训练样本如下:
ω1类: (0,0),(0,1)
ω1类: (1,0),(1,1)
试用感知器算法求其判别函数。
解:特征向量的增1矩阵
X(1)=(001)t,X(2)=(011)t
X(3)=(101)t,X(4)=(111)t
取
C=1,Wt