Udacity无人驾驶工程师试看课——车道线检测观后感
Posted simingfan
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Udacity无人驾驶工程师试看课——车道线检测观后感相关的知识,希望对你有一定的参考价值。
第一周的内容就是完成一个项目 Finding Lane Line,是免费试看的,网页版的,最多三四个小时就能看完。
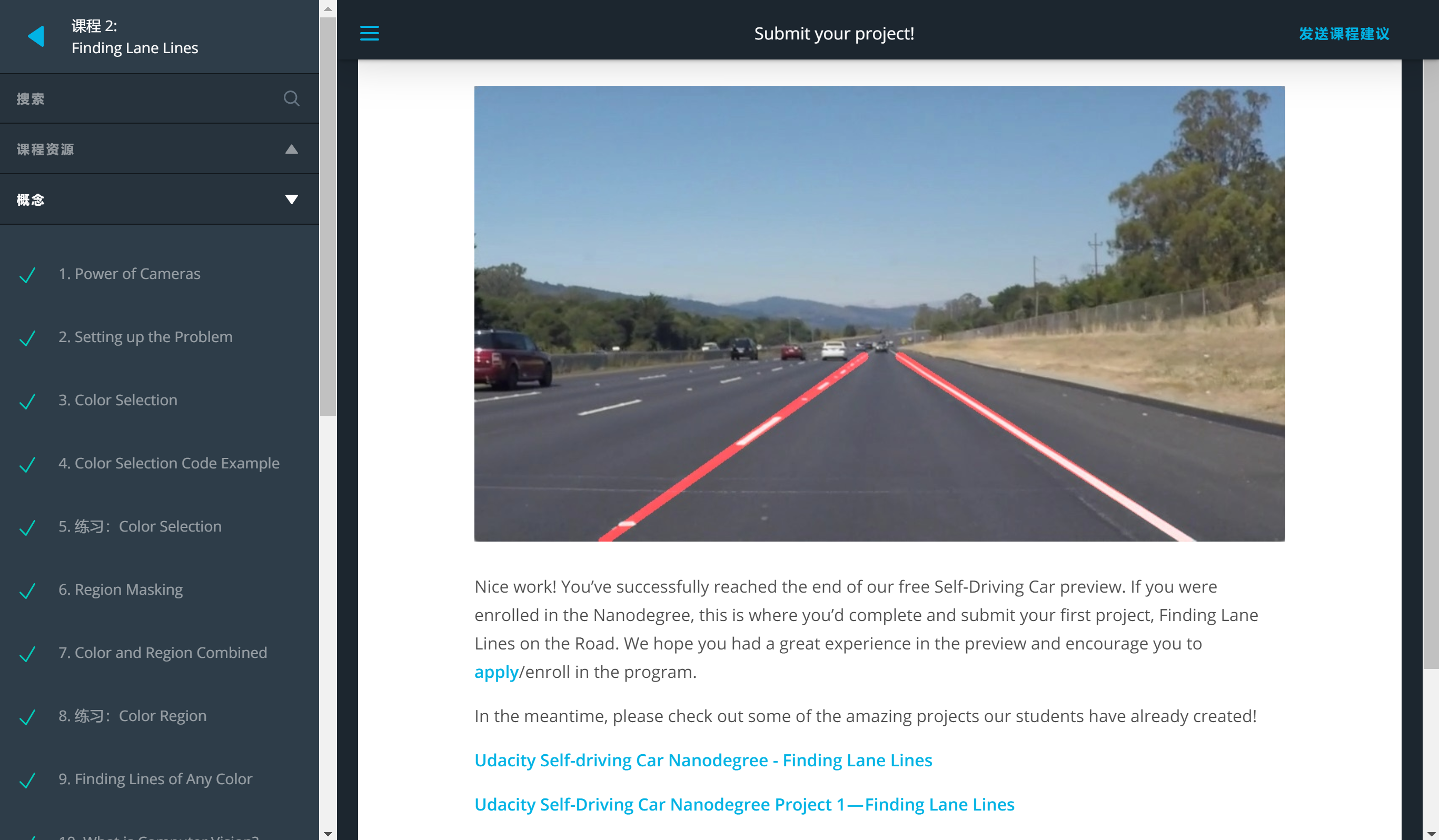
讲的就是整个pipeline,一分钟视频版可以在这里看完:https://www.youtube.com/watch?v=xknesDIgOcA
或者看这个博客https://medium.com/udacity/udacity-self-driving-car-nanodegree-project-1-finding-lane-lines-719ac1adbed9
我也简单描述一下,内容大概就是:
- 颜色选择
- 用颜色(白/黄)生成color mask
- 用区域(三角形/四边形/其他多边形)来生成region mask
- Combine mask
- 边缘检测
- 变为灰度图
- Canny边缘检测(edges = cv2.Canny(gray, low_threshold, high_threshold))
- Hough变换在Canny边缘上找直线(lines = cv2.HoughLinesP(masked_edges, rho, theta, threshold, np.array([]),
min_line_length, max_line_gap)) - 结合region mask得到最终结果
虽然涉及的知识量很少,但课程设计的很棒。比如讲Hough变换的时候一连用了好几个图来讲。再比如代码可以直接在网页上跑,你的任务仅仅是选择参数,比如颜色选择的阈值,Canny边缘检测的阈值,而Hough变换筛选直线的参数会比较多。
不过总感觉内容有点简单,比如车道线检测,答案所给的参数并不能很好的只筛选车道线,必须结合region mask才能得到比较好的结果。
虽然我学过opencv和数字图像处理,但以前没想过这些(颜色选择/边缘检测/Hough变换)直接用在车道线检测上就能得到比较好的效果。
买是不可能买的,价格真的太贵了,不过网页版视频和代码很值得一看。
以上是关于Udacity无人驾驶工程师试看课——车道线检测观后感的主要内容,如果未能解决你的问题,请参考以下文章