用arduino做一个智能垃圾桶
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了用arduino做一个智能垃圾桶相关的知识,希望对你有一定的参考价值。
这几天工作忙得差不多了,有点时间继续折腾我的arduino,上次从TB买的arduino 套件中有一个人体热能感应模块,就是用来感应人体接近信号的。今天我们用这个东东来做一个简易的智能垃圾桶。要实现的功用是:当有人接近时,垃圾能用自动打开盖子,人离开时,盖子能自动关闭。一、所需材料和工具:
1 Arduino单片机 我用的是Arduino Nano
2 人体热能感应模块
我用的是一个杂牌的,但接线和使用方式和HC-SR501一样 
3 舵机 SG90
4 翻盖式垃圾桶 最好是小一点的。
5 手机充电头和mini USB电源线 直接给单片机供电用的,不是我们手机个常用的microUSB接口或TYPE C接口。
6 导线
7 热熔胶枪
8 电烙铁
9 刀片及其它工具
说明:
1、因为SG90舵机的扭矩很小(可以理解为这个舵机没多大劲),只能推动小垃圾桶的盖子,如果垃圾桶过大,我们就需要扭矩更大的舵机,并需要给舵机单独供电。
2、我的arduiono套件随机赠送的人体热能感应模块是一个杂牌的东东,但接线和使用方法与HC-SR501相同。
二、程序代码
代码很简单,只有几行。
#include <Servo.h>//舵机所需类的头文件
/*
* 本例结合人体红外感应模块和舵机实现对垃圾桶的自动控制。
* 当人接近或离开垃圾桶时,单片机根据信号强度的变化,操作舵机旋转到指度角度,实现垃圾桶的自动开关。
* 人体红外感应模块型号为HC-SR501,三条线分别为+5伏,地线和输出信号口,输出信号接A3
* 舵机用型号为sg90,本舵机有三条线,红为+5伏,褐色为GND,橙色为信号给,本例接pin9
* 本例在arduino nano上实验通过
*/
Servo myservo; // 创建舵机对象来控制舵机
int angle_pos = 0;
int pin_sensory= A3;//设置A3接人体感应信号的out口
int value;
void setup()
{
// 初始化串口通信
Serial.begin(9600);
Serial.println("Signal Intensity:");
// 把连接在引脚9上的舵机赋予舵机对其控制
myservo.attach(9);
pinMode(pin_sensory,INPUT);
myservo.write(angle_pos);
}
void loop()
{
value= analogRead(pin_sensory);
Serial.println(value);
angle_pos=myservo.read();
if (value>=400)//当值大于400时,舵机转到90度,垃圾桶开盖。
//这个值需要自己根据不同距离调整,距离越近,信号越强,经验数据:在距离探头20公分时,强度值约800,人离开后,强度值约40。
{
myservo.write(90);//舵机转到90度
delay(50);
}
else
{
delay(50);
myservo.write(0);//舵机回到0度
}
delay(1000);
}三、线路连接
实物连接如下图: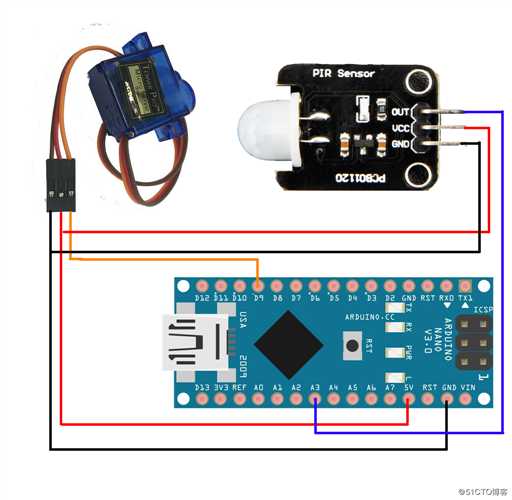
说明一下:
1、SG-90舵机上有三条线,一般情况下棕色是地线,接GND,红色是V+,接正5伏,橙色为控制线,我接在9号接口。
舵机有两种驱动方式,第一种方式是无驱动的,可以用在所有可用的端口上,但程序代码比较复杂,用起来相对麻烦,第二种是有驱动的,代码非常简单,但只能接在9、10两个口上,本例中使用第二种方式(所在我们代码的开头第一行就引用了舵机驱动类的头文件)。
2、HC-SR501人体热能感应模块也有三个接口,上面标的有,VCC接正5伏,GND接地线,OUT我接在A3上。
3、本来还想加一个LED指示灯,用来在夜间指示垃圾桶的位置,但感应模块上有一个蓝色的指示灯,在人体接近时就会自动点亮,所以这个就省了。
四、安装和调试
1、写入程序,这个都会,我用的是arduino IDE(1.8.5版的),将上面的代码复制进去,在面包板上按上图接好,编译后直接点击上传就行了。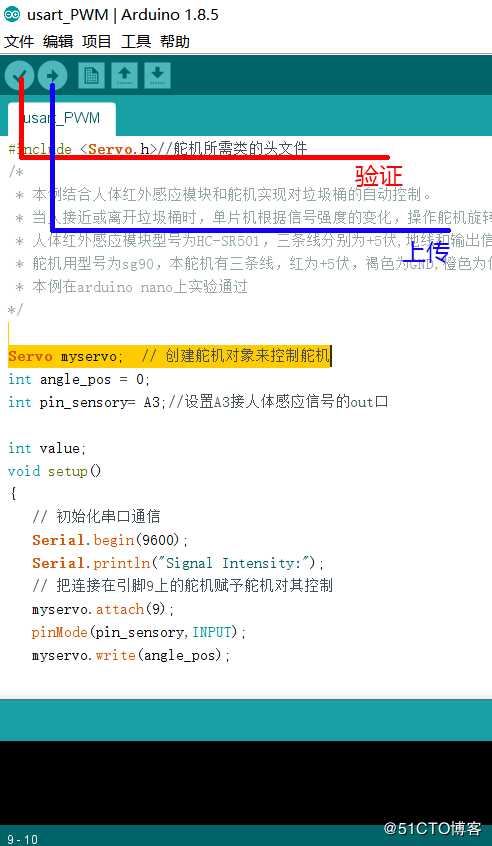

2、改装垃圾桶
我找的垃圾桶是那种翻盖的桌上小垃圾桶,盖子像一个翘翘板。将盖子从限位销中取出来,用刀片将限位销去掉,然后在限位销的位置打孔。
然后找一个用完的水笔芯(之所以选择水笔芯,是因为他的粗细刚好能套在舵机主轴的齿轮上,而且结合得非常紧。)穿过刚才打的孔和垃圾桶盖子上的孔,并用热熔胶固定。
然后在垃圾外侧固定舵机、单片机和感应模块,为了外面美观一些,我用3D打印机做了一个小盒子放单片机和感应模块,没有的朋友可以用一个雪茄盒或其它材料代替。
将舵机主轴插入水笔芯的孔中,并用热熔胶将舵机和小盒子固定住。
需要注意的时,舵机主轴固定在水笔芯的时候要注意舵机的0度和90度位置,以免出现初始化时垃圾桶盖子关不严的情况。
五、运行效果
使用miniUSB线和手机充电头给arduino通过5伏直流电,就可以运行了,运行情况见以下视频连接。看起来拉风吧!
https://v.youku.com/v_show/id_XNDM5Nzk3MTQ1Mg==.html?spm=a2h3j.8428770.3416059.1
以上是关于用arduino做一个智能垃圾桶的主要内容,如果未能解决你的问题,请参考以下文章