ORB-SLAM demo测试
Posted sasasatori
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ORB-SLAM demo测试相关的知识,希望对你有一定的参考价值。
给了Example,从官网上下了个数据集,跟着跑就得了
https://blog.csdn.net/u010128736/article/category/6461394
用深度相机,也就是RGB-D的数据集来跑
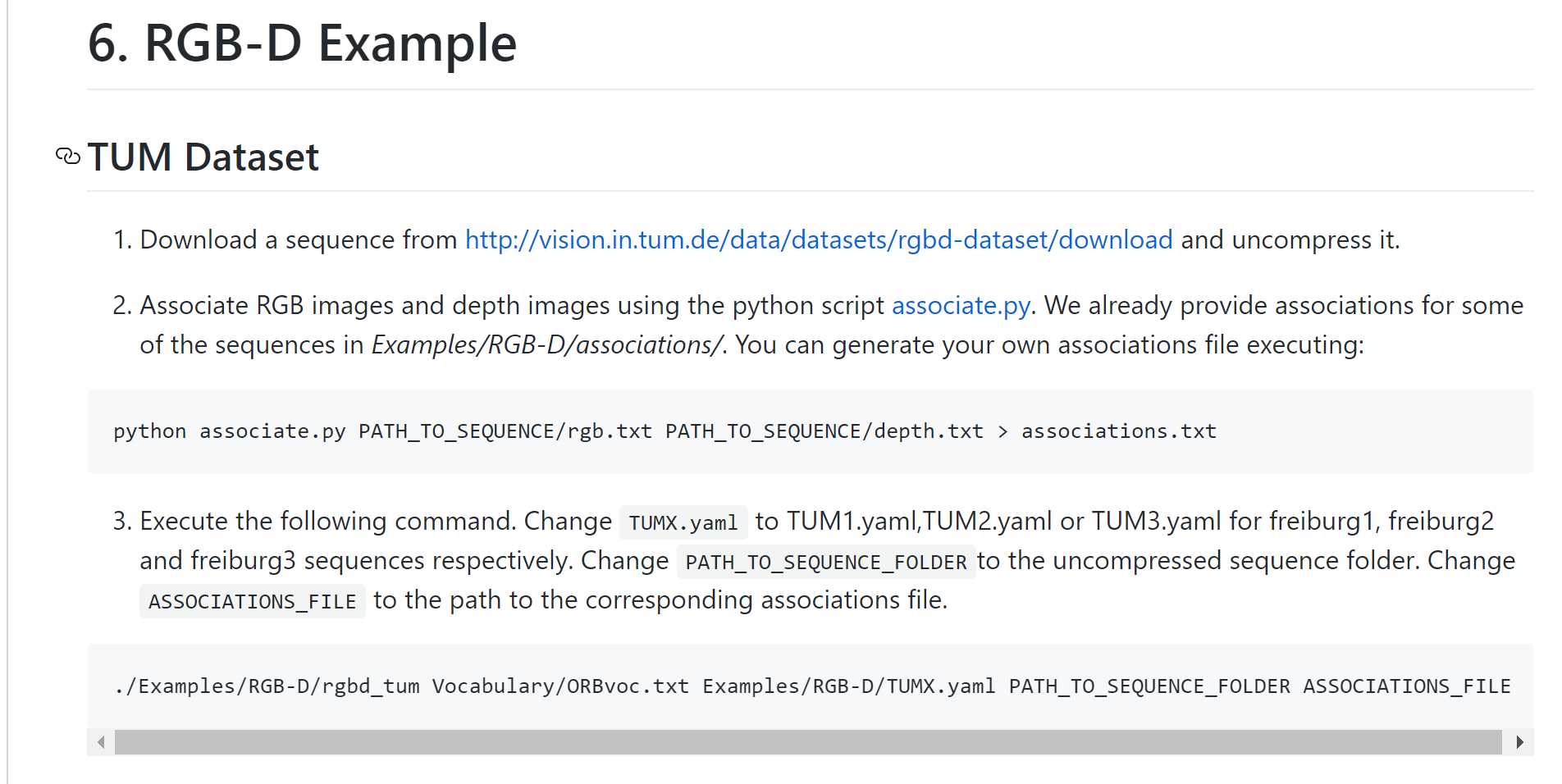
在Example/RGB-D/associations中,可以找到一些官方已经生成好的associations,我直接根据里面有的associations去找了一个frc1_xyz的数据集,跑起来测试
执行内容如下:
./Examples/RGB-D/rgbd_tum Vocabulary/ORBvoc.txt Examples/RGB-D/TUM1.yaml Data/rgbd_dataset_freiburg1_xyz Examples/RGB-D/associations/fr1_xyz.txt直接运行时出现报错:
Pangolin:
Terminate called after throwing an instance of 'std::runtime_error'
what():: Pangolin X11: Unable to retrieve framebuffer options解决方法如下
https://blog.csdn.net/tap880507/article/details/79683219
解决方法:将源码目录Pangolin\\src\\display\\device下的display_x11.cpp文件做如下修改,注释下面的两行代码即可:
staticint visual_attribs[] =
GLX_X_RENDERABLE , True,
GLX_DRAWABLE_TYPE , GLX_WINDOW_BIT,
GLX_RENDER_TYPE , GLX_RGBA_BIT,
GLX_X_VISUAL_TYPE , GLX_TRUE_COLOR,
GLX_RED_SIZE , 8,
GLX_GREEN_SIZE, 8,
GLX_BLUE_SIZE, 8,
GLX_ALPHA_SIZE, 8,
GLX_DEPTH_SIZE, 24,
GLX_STENCIL_SIZE, 8,
GLX_DOUBLEBUFFER , glx_doublebuffer ? True : False,
//注释这一行GLX_SAMPLE_BUFFERS , glx_sample_buffers,
//注释这一行 GLX_SAMPLES , glx_sample_buffers > 0 ? glx_samples : 0,
None
修改完毕之后重新cmake&&make&&make install
然后运行就OK了
以上是关于ORB-SLAM demo测试的主要内容,如果未能解决你的问题,请参考以下文章