《DSP using MATLAB》Problem 8.30
Posted ky027wh-sx
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了《DSP using MATLAB》Problem 8.30相关的知识,希望对你有一定的参考价值。
10月1日,新中国70周岁生日,上午观看了盛大的庆祝仪式,整齐的方阵,先进的武器,尊敬的先辈英雄,欢乐的人们,愿我们的
国家越来越好,人民生活越来越好。
接着做题。

代码:
%% ------------------------------------------------------------------------ %% Output Info about this m-file fprintf(‘\\n***********************************************************\\n‘); fprintf(‘ <DSP using MATLAB> Problem 8.30 \\n\\n‘); banner(); %% ------------------------------------------------------------------------ % ----------------------------------- % Ω=(2/T)tan(ω/2) % ω=2*[atan(ΩT/2)] % Digital Filter Specifications: % ----------------------------------- wp = 0.4*pi; % digital passband freq in rad ws = 0.6*pi; % digital stopband freq in rad Rp = 0.5; % passband ripple in dB As = 50; % stopband attenuation in dB Ripple = 10 ^ (-Rp/20) % passband ripple in absolute Attn = 10 ^ (-As/20) % stopband attenuation in absolute % Analog prototype specifications: Inverse Mapping for frequencies T = 2; % set T = 1 Fs = 1/T; OmegaP = (2/T)*tan(wp/2); % prototype passband freq OmegaS = (2/T)*tan(ws/2); % prototype stopband freq % Analog Butterworth Prototype Filter Calculation: [cs, ds] = afd_butt(OmegaP, OmegaS, Rp, As); % Calculation of second-order sections: fprintf(‘\\n***** Cascade-form in s-plane: START *****\\n‘); [CS, BS, AS] = sdir2cas(cs, ds); fprintf(‘\\n***** Cascade-form in s-plane: END *****\\n‘); % Calculation of Frequency Response: [db_s, mag_s, pha_s, ww_s] = freqs_m(cs, ds, 2*pi/T); % -------------------------------------------------------------------- % find exact band-edge frequencies for the given dB specifications % -------------------------------------------------------------------- %ind = find( abs(ceil(db_s))-50 == 0 ) [diff_to_50dB, ind] = min(abs(db_s+50)) db_s(ind-3 : ind+3) % magnitude response, dB ww_s(ind)/(pi) % analog frequency in kpi units %ww_s(ind)/(2*pi) % analog frequency in Hz units [sA,index] = sort(abs(db_s+50)); AA_dB = db_s(index(1:8)) AB_rad = ww_s(index(1:8))/(pi) AC_Hz = ww_s(index(1:8))/(2*pi) % ------------------------------------------------------------------- % Calculation of Impulse Response: [ha, x, t] = impulse(cs, ds); % Impulse Invariance Transformation: %[b, a] = imp_invr(cs, ds, T); % Bilinear Transformation [b, a] = bilinear(cs, ds, Fs); [C, B, A] = dir2cas(b, a); % Calculation of Frequency Response: [db, mag, pha, grd, ww] = freqz_m(b, a); % -------------------------------------------------------------------- % find exact band-edge frequencies for the given dB specifications % -------------------------------------------------------------------- %ind = find( abs(ceil(db))-50 == 0 ) [diff_to_80dB, ind] = min(abs(db+50)) db(ind-3 : ind+3) % magnitude response, dB ww(ind)/(pi) %ww(ind)*Fs/(2*pi) (2/T)*tan(ww(ind)/2)/pi [sA,index] = sort(abs(db+50)); AA_dB = db(index(1:8))‘ AB_rad = ww(index(1:8))‘/pi AC_Hz = (2/T)*tan(ww(index(1:8))‘/2)/pi % ------------------------------------------------------------------- %% ----------------------------------------------------------------- %% Plot %% ----------------------------------------------------------------- figure(‘NumberTitle‘, ‘off‘, ‘Name‘, ‘Problem 8.30 Analog Butterworth lowpass‘) set(gcf,‘Color‘,‘white‘); M = 1; % Omega max subplot(2,2,1); plot(ww_s/pi, mag_s); grid on; axis([-M, M, 0, 1.2]); xlabel(‘ Analog frequency in \\pi units‘); ylabel(‘|H|‘); title(‘Magnitude in Absolute‘); %set(gca, ‘XTickMode‘, ‘manual‘, ‘XTick‘, [-0.876, -0.463, 0, 0.463, 0.876]); % T=1 set(gca, ‘XTickMode‘, ‘manual‘, ‘XTick‘, [-0.44, -0.23, 0, 0.23, 0.44]); % T=2 set(gca, ‘YTickMode‘, ‘manual‘, ‘YTick‘, [0, 0.0032, 0.5, 0.9441, 1]); subplot(2,2,2); plot(ww_s/pi, db_s); grid on; axis([-M, M, -100, 10]); xlabel(‘Analog frequency in \\pi units‘); ylabel(‘Decibels‘); title(‘Magnitude in dB ‘); %set(gca, ‘XTickMode‘, ‘manual‘, ‘XTick‘, [-0.876, -0.463, 0, 0.463, 0.8591, 0.876]); % T=1 set(gca, ‘XTickMode‘, ‘manual‘, ‘XTick‘, [-0.44, -0.23, 0, 0.23, 0.4295, 0.44]); % T=2 set(gca, ‘YTickMode‘, ‘manual‘, ‘YTick‘, [-90, -50, -1, 0]); set(gca,‘YTickLabelMode‘,‘manual‘,‘YTickLabel‘,[‘90‘;‘50‘;‘ 1‘;‘ 0‘]); subplot(2,2,3); plot(ww_s/pi, pha_s/pi); grid on; axis([-M, M, -1.2, 1.2]); xlabel(‘Analog frequency in \\pi nuits‘); ylabel(‘radians‘); title(‘Phase Response‘); set(gca, ‘XTickMode‘, ‘manual‘, ‘XTick‘, [-OmegaS, -OmegaP, 0, OmegaP, OmegaS]/pi); set(gca, ‘YTickMode‘, ‘manual‘, ‘YTick‘, [-1:0.5:1]); subplot(2,2,4); plot(t, ha); grid on; %axis([0, 30, -0.05, 0.25]); xlabel(‘time in seconds‘); ylabel(‘ha(t)‘); title(‘Impulse Response‘); figure(‘NumberTitle‘, ‘off‘, ‘Name‘, ‘Problem 8.30 Digital Butterworth lowpass by afd_butt function‘) set(gcf,‘Color‘,‘white‘); M = 2; % Omega max subplot(2,2,1); plot(ww/(pi), mag); axis([0, M, 0, 1.2]); grid on; xlabel(‘Digital frequency in \\pi units‘); ylabel(‘|H|‘); title(‘Magnitude Response‘); set(gca, ‘XTickMode‘, ‘manual‘, ‘XTick‘, [0, 0.4, 0.6, 1.0, M]); set(gca, ‘YTickMode‘, ‘manual‘, ‘YTick‘, [0, 0.0032, 0.5, 0.9441, 1]); subplot(2,2,2); plot(ww/(pi), pha/pi); axis([0, M, -1.1, 1.1]); grid on; xlabel(‘Digital frequency in \\pi nuits‘); ylabel(‘radians in \\pi units‘); title(‘Phase Response‘); set(gca, ‘XTickMode‘, ‘manual‘, ‘XTick‘, [0, 0.4, 0.6, 1.0, M]); set(gca, ‘YTickMode‘, ‘manual‘, ‘YTick‘, [-1:1:1]); subplot(2,2,3); plot(ww/pi, db); axis([0, M, -100, 10]); grid on; xlabel(‘Digital frequency in \\pi units‘); ylabel(‘Decibels‘); title(‘Magnitude in dB ‘); %set(gca, ‘XTickMode‘, ‘manual‘, ‘XTick‘, [0, 0.4, 0.594, 0.6, 1.0, M]); % T=1 set(gca, ‘XTickMode‘, ‘manual‘, ‘XTick‘, [0, 0.4, 0.594, 0.6, 1.0, M]); % T=2 set(gca, ‘YTickMode‘, ‘manual‘, ‘YTick‘, [-70, -50, -1, 0]); set(gca,‘YTickLabelMode‘,‘manual‘,‘YTickLabel‘,[‘70‘;‘50‘;‘ 1‘;‘ 0‘]); subplot(2,2,4); plot(ww/pi, grd); grid on; %axis([0, M, 0, 35]); xlabel(‘Digital frequency in \\pi units‘); ylabel(‘Samples‘); title(‘Group Delay‘); set(gca, ‘XTickMode‘, ‘manual‘, ‘XTick‘, [0, 0.4, 0.6, 1.0, M]); %set(gca, ‘YTickMode‘, ‘manual‘, ‘YTick‘, [0:5:35]); figure(‘NumberTitle‘, ‘off‘, ‘Name‘, ‘Problem 8.30 Pole-Zero Plot‘) set(gcf,‘Color‘,‘white‘); zplane(b,a); title(sprintf(‘Pole-Zero Plot‘)); %pzplotz(b,a); % ---------------------------------------------- % Calculation of Impulse Response % ---------------------------------------------- figure(‘NumberTitle‘, ‘off‘, ‘Name‘, ‘Problem 8.30 Imp & Freq Response‘) set(gcf,‘Color‘,‘white‘); t = [0:0.5:60]; subplot(2,1,1); impulse(cs,ds,t); grid on; % Impulse response of the analog filter axis([0,60,-0.3,0.5]);hold on n = [0:1:60/T]; hn = filter(b,a,impseq(0,0,60/T)); % Impulse response of the digital filter stem(n*T,hn); xlabel(‘time in sec‘); title (sprintf(‘Impulse Responses, T=%f‘,T)); hold off % Calculation of Frequency Response: [dbs, mags, phas, wws] = freqs_m(cs, ds, 2*pi/T); % Analog frequency s-domain [dbz, magz, phaz, grdz, wwz] = freqz_m(b, a); % Digital z-domain %% ----------------------------------------------------------------- %% Plot %% ----------------------------------------------------------------- subplot(2,1,2); plot(wws/(2*pi), mags*Fs,‘b+‘, wwz/(2*pi)*Fs, magz,‘r‘); grid on; xlabel(‘frequency in Hz‘); title(‘Magnitude Responses‘); ylabel(‘Magnitude‘); text(-0.3,0.15,‘Analog filter‘, ‘Color‘, ‘b‘); text(0.4,0.55,‘Digital filter‘, ‘Color‘, ‘r‘); %% +++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ %% MATLAB butter function %% +++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ % Analog Prototype Order Calculations: N = ceil((log10((10^(Rp/10)-1)/(10^(As/10)-1)))/(2*log10(OmegaP/OmegaS))); fprintf(‘\\n\\n ********** Butterworth Filter Order = %3.0f \\n‘, N) OmegaC = OmegaP/((10^(Rp/10)-1)^(1/(2*N))); % Analog BW prototype cutoff freq wn = 2*atan((OmegaC*T)/2); % Digital BW cutoff freq % Digital Butterworth Filter Design: wn = wn/pi; % Digital Butterworth cutoff freq in pi units [b, a] = butter(N, wn); [C, B, A] = dir2cas(b, a) % Calculation of Frequency Response: [db, mag, pha, grd, ww] = freqz_m(b, a); figure(‘NumberTitle‘, ‘off‘, ‘Name‘, ‘Problem 8.30 Digital Butterworth lowpass by butter function‘) set(gcf,‘Color‘,‘white‘); M = 2; % Omega max subplot(2,2,1); plot(ww/pi, mag); axis([0, M, 0, 1.2]); grid on; xlabel(‘ frequency in \\pi units‘); ylabel(‘|H|‘); title(‘Magnitude Response‘); set(gca, ‘XTickMode‘, ‘manual‘, ‘XTick‘, [0, 0.4, 0.6, 1.0, M]); set(gca, ‘YTickMode‘, ‘manual‘, ‘YTick‘, [0, 0.0032, 0.5, 0.9441, 1]); subplot(2,2,2); plot(ww/pi, pha/pi); axis([0, M, -1.1, 1.1]); grid on; xlabel(‘frequency in \\pi nuits‘); ylabel(‘radians in \\pi units‘); title(‘Phase Response‘); set(gca, ‘XTickMode‘, ‘manual‘, ‘XTick‘, [0, 0.4, 0.6, 1.0, M]); set(gca, ‘YTickMode‘, ‘manual‘, ‘YTick‘, [-1:1:1]); subplot(2,2,3); plot(ww/pi, db); axis([0, M, -100, 10]); grid on; xlabel(‘frequency in \\pi units‘); ylabel(‘Decibels‘); title(‘Magnitude in dB ‘); set(gca, ‘XTickMode‘, ‘manual‘, ‘XTick‘, [0, 0.4, 0.6, 1.0, M]); set(gca, ‘YTickMode‘, ‘manual‘, ‘YTick‘, [-70, -50, -1, 0]); set(gca,‘YTickLabelMode‘,‘manual‘,‘YTickLabel‘,[‘70‘;‘50‘;‘ 1‘;‘ 0‘]); subplot(2,2,4); plot(ww/pi, grd); grid on; %axis([0, M, 0, 35]); xlabel(‘frequency in \\pi units‘); ylabel(‘Samples‘); title(‘Group Delay‘); set(gca, ‘XTickMode‘, ‘manual‘, ‘XTick‘, [0, 0.4, 0.6, 1.0, M]); %set(gca, ‘YTickMode‘, ‘manual‘, ‘YTick‘, [0:5:35]); figure(‘NumberTitle‘, ‘off‘, ‘Name‘, ‘Problem 8.30 Pole-Zero Plot‘) set(gcf,‘Color‘,‘white‘); zplane(b,a); title(sprintf(‘Pole-Zero Plot‘)); %pzplotz(b,a); % ---------------------------------------------- % Calculation of Impulse Response % ---------------------------------------------- figure(‘NumberTitle‘, ‘off‘, ‘Name‘, ‘Problem 8.30 Imp & Freq Response‘) set(gcf,‘Color‘,‘white‘); t = [0:0.5:60]; subplot(2,1,1); impulse(cs,ds,t); grid on; % Impulse response of the analog filter axis([0,60,-0.3,0.5]);hold on n = [0:1:60/T]; hn = filter(b,a,impseq(0,0,60/T)); % Impulse response of the digital filter stem(n*T,hn); xlabel(‘time in sec‘); title (sprintf(‘Impulse Responses, T=%f‘,T)); hold off % Calculation of Frequency Response: [dbs, mags, phas, wws] = freqs_m(cs, ds, 2*pi/T); % Analog frequency s-domain [dbz, magz, phaz, grdz, wwz] = freqz_m(b, a); % Digital z-domain %% ----------------------------------------------------------------- %% Plot %% ----------------------------------------------------------------- subplot(2,1,2); plot(wws/(2*pi), mags*Fs,‘b+‘, wwz/(2*pi)*Fs, magz,‘r‘); grid on; xlabel(‘frequency in Hz‘); title(‘Magnitude Responses‘); ylabel(‘Magnitude‘); text(-0.3,0.15,‘Analog filter‘, ‘Color‘, ‘b‘); text(0.4,0.55,‘Digital filter‘, ‘Color‘, ‘r‘);
运行结果:
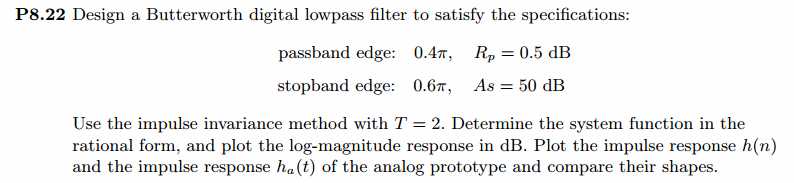
非归一化Butterworth模拟原型低通滤波器,直接形式的系数,
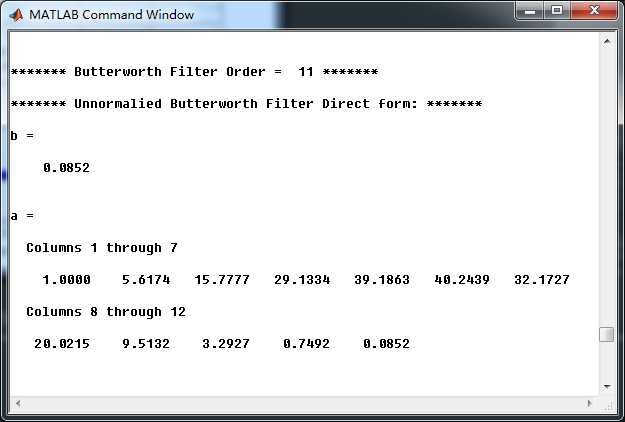
模拟低通串联形式的系数:
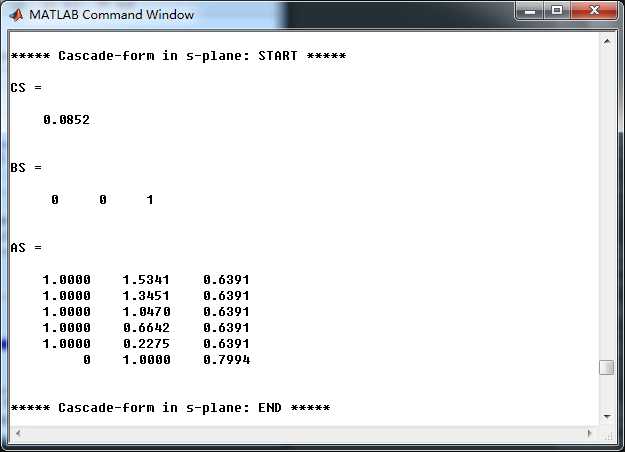
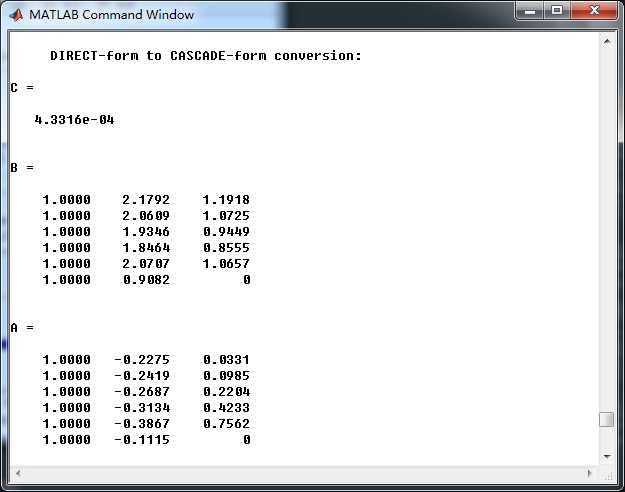
用双线性变换法,转换成数字Butterworth低通,直接形式的系数如下
数字低通串联形式系数
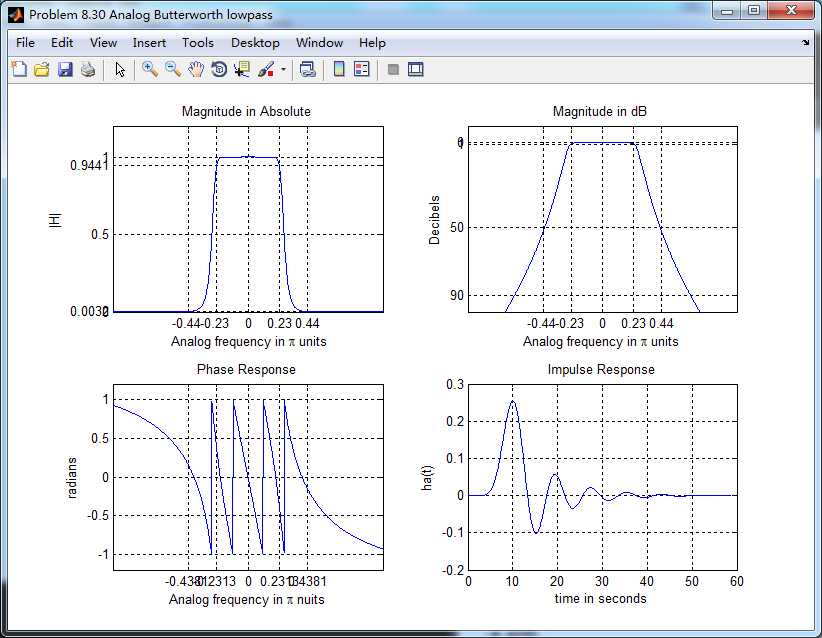
模拟Butterworth低通原型滤波器的幅度谱、相位谱和脉冲响应
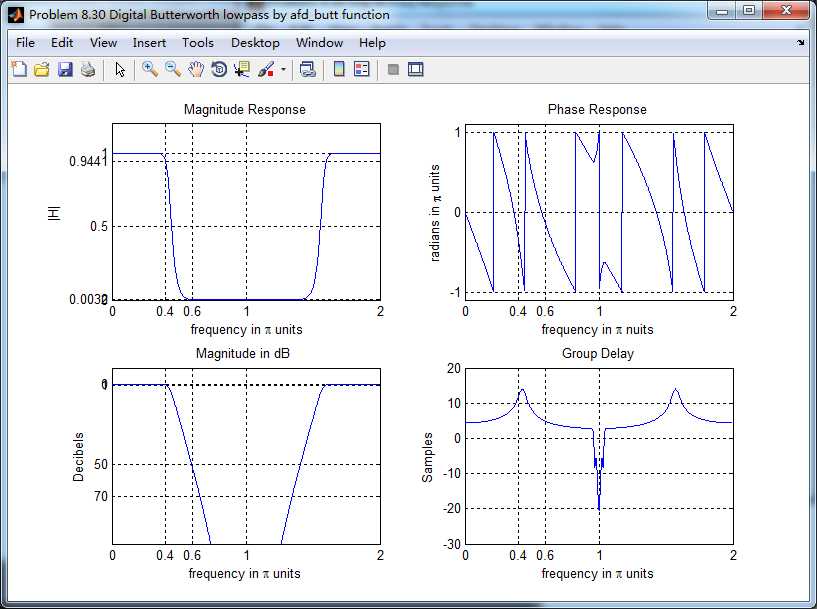
双线性变换法,得到的数字Butterworth低通滤波器,起幅度谱、相位谱和群延迟响应
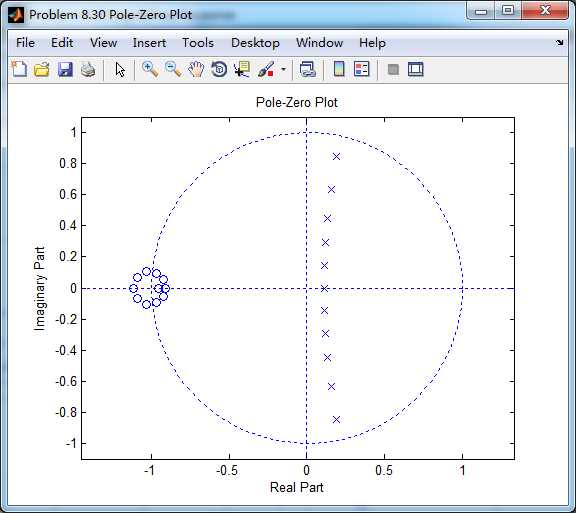
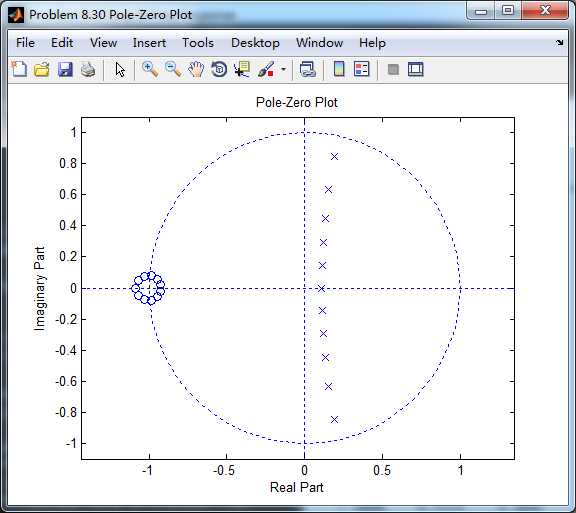
数字低通系统函数的零极点图
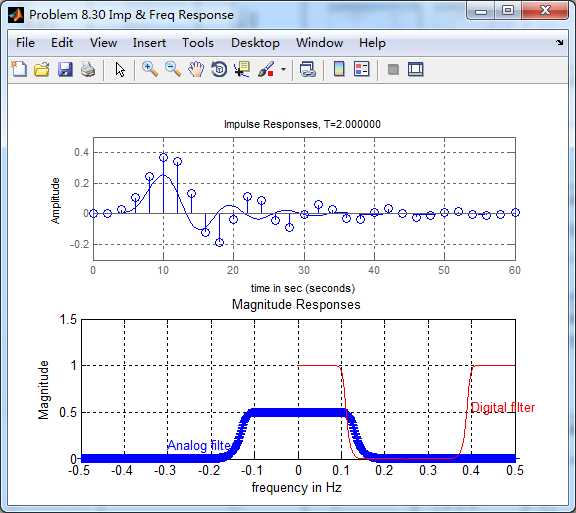
下图的上半部分,模拟低通和数字低通的脉冲响应对比,可以看出形态不一致。
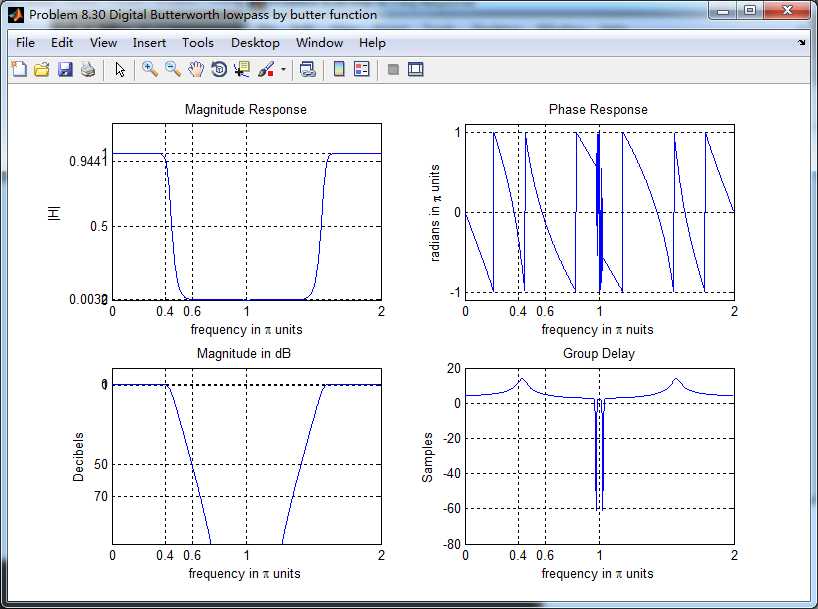
采用MATLAB自带的butter函数求取数字低通,其幅度谱、相位谱和群延迟。
与上面afd_butt函数所得结果相比,相位谱和群延迟稍有不同。
零极点图,也稍有不同,零点部分靠的更紧密。
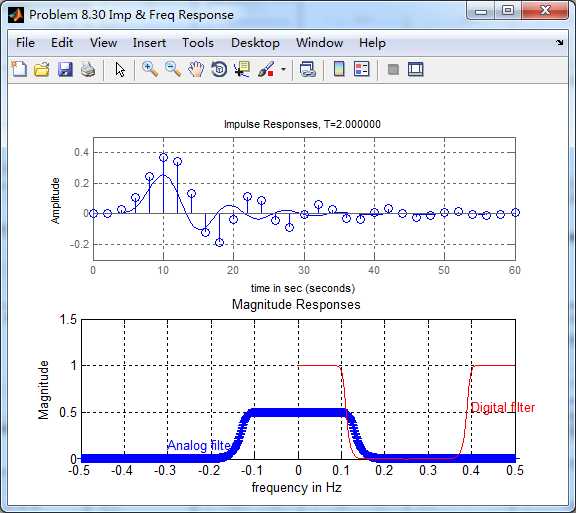
脉冲响应,看不出区别。
以上是关于《DSP using MATLAB》Problem 8.30的主要内容,如果未能解决你的问题,请参考以下文章