10.1 叉积 ,极角排序,扫描法求凸包
Posted -ifrush
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了10.1 叉积 ,极角排序,扫描法求凸包相关的知识,希望对你有一定的参考价值。
凸包:用一个凸多边形将所有点围起来,这个凸多边形就是凸包
1.先要引入一个数学工具,向量叉积
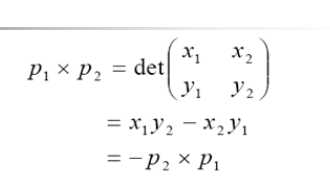
|c|=|a×b|=|a| |b|sinα (α为a,b向量之间的夹角)
则 |c| 为向量a ,b所组成的平行四边形的面积
这里是用叉积判断两向量的相对位置关系(非常有用!)
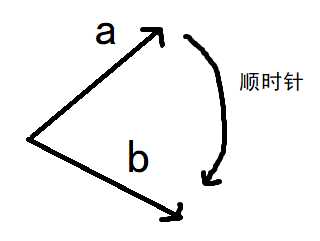
则 a x b < 0 (a在b的逆时针方向 ) , b x a > 0(b在a的顺时针方向)
//求叉积 struct node double x ,y; node operator -( const node & s ) return x-s.x , y-s.y; p[N] ,s[N]; inline double X( node a ,node b ) return a.x*b.y - b.x*a.y;
2. Graham扫描法求凸包
1)找出所有点中在最左下角的点定为极点
//找左下边界点 int k = 1; rep( i ,2 ,n ) if( p[i].y < p[k].y || p[i].y == p[k].y && p[i].x < p[k].x ) k = i; swap( p[1] ,p[k] );
2)利用叉积进行极角排序
//极角比较 bool cmp ( node &a , node &b ) double x = X(a-p[1] ,b-p[1]); //叉积判断向量位置关系 if( x > 0 )return 1; if( x==0 && dis( a ,p[1])<dis( b ,p[1]) )return 1; return 0;
//极角排序 sort( p+2 ,p+n+1 ,cmp);
3)存凸包
s为存凸包的栈 ,t为栈顶
则由以下关系用叉积取舍s中的点
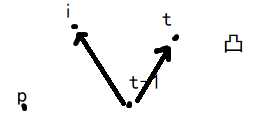
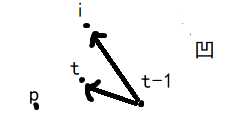
//将凸包存在s中 s[1] = p[1]; s[2] = p[2]; int t = 2; rep( i ,3 ,n ) while( t >= 2 && mul( s[t-1] ,s[t] ,p[i] )<=0 )t--; s[++t] = p[i];
然后凸包就求出来了
模板题 :
P2742 【模板】二维凸包 / [USACO5.1]圈奶牛
#include <iostream> #include <cstdio> #include <cmath> #include <algorithm> #include <set> #include <queue> #include <stack> #include <string> #include <cstring> #include <vector> #include <map> #include <unordered_map> #define mem( a ,x ) memset( a , x ,sizeof(a) ) #define rep( i ,x ,y ) for( int i = x ; i<=y ;i++ ) #define lson l ,mid ,pos<<1 #define rson mid+1 ,r ,pos<<1|1 #define Fi first #define Se second using namespace std; typedef long long ll ; typedef pair<int ,int> pii; typedef pair<ll ,int> pli; const ll inf = 0x3f3f3f3f; const int N = 1e5+5; const ll mod = 1e9+7; int n ,m; //求叉积 struct node double x ,y; node operator -( const node & s ) return x-s.x , y-s.y; p[N] ,s[N]; inline double X( node a ,node b ) return a.x*b.y - b.x*a.y; inline double dis( node a ,node b ) return sqrt( (a.x-b.x)*(a.x-b.x)+(a.y-b.y)*(a.y-b.y)); inline double mul( node a ,node b ,node c ) return X(b-a ,c-a); //极角比较 bool cmp ( node &a , node &b ) double x = X(a-p[1] ,b-p[1]); //叉积判断向量位置关系 if( x > 0 )return 1; if( x==0 && dis( a ,p[1])<dis( b ,p[1]) )return 1; return 0; //Graham 扫描 int graham( ) //找左下边界点 int k = 1; rep( i ,2 ,n ) if( p[i].y < p[k].y || p[i].y == p[k].y && p[i].x < p[k].x ) k = i; swap( p[1] ,p[k] ); //极角排序 sort( p+2 ,p+n+1 ,cmp); //将凸包存在s中 s[1] = p[1]; s[2] = p[2]; int t = 2; rep( i ,3 ,n ) while( t >= 2 && mul( s[t-1] ,s[t] ,p[i] )<=0 )t--; s[++t] = p[i]; return t; int main( ) scanf("%d" ,&n); rep( i ,1 ,n ) scanf("%lf%lf" ,&p[i].x ,&p[i].y ); int sz = graham( ); double ans = dis(s[1] ,s[sz]); rep( i ,1 ,sz-1 )ans += dis( s[i] ,s[i+1] ) ; printf("%.2f" ,ans); return 0;
以上是关于10.1 叉积 ,极角排序,扫描法求凸包的主要内容,如果未能解决你的问题,请参考以下文章