A*算法介绍
Posted zhonghu
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了A*算法介绍相关的知识,希望对你有一定的参考价值。
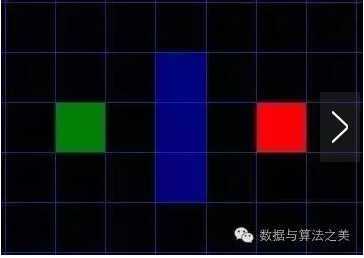
我们假设要从绿色区域A移动到红色区域B,深蓝色代表不可行走的区域。
第一步:首先将寻路区域划分成小格子;
第二步:从起点A开始,将其加入到一个由方格组成的openList(开放列表)中。这个openList刚开始只有一个数据,就是起点A。openList里的路径可能是沿途经过的,也有可能不经过。
openList是一个待检查的方格列表。
第三步:查看与起点A相邻的方格(忽略其中不可行走的方格),把其中可行走或可到达的方格加入到openList中。把起点A设置为这些相邻方格的父亲。当我们在追踪路径时,这些父节点很重要。
第四步:把A节点从openList中移除,加入到closeList(封闭列表)中,closeList的每个方格都是现在不需要再关注的。
第五步:我们需要从openList中选一个与A节点相邻的方格。重复下面的步骤,找出具有最小F值的那个节点:
F = G + H。G表示从起点A移动到当前节点的移动代价;H表示从指定的节点移动到终点B的估算成本。
如上所述:
G是从起点A移动到指定节点的移动代价。在本例中,横向和纵向的移动代价为10,对角线的移动代价为14.之所以使用这些数据,是因为实际的对角移动距离是2的平方根。我们避免了开方
和小数的计算。这并不是代表没有这个能力或不喜欢数学。而是可以使计算变的更快。
这里有很多种方法估算H值。这里我们使用Manhattan方法,计算从当前节点横向或纵向移动到达目标所经过的方格数,忽略对角运动,然后把总数乘以10.由于是忽略路径中的障碍物,所以是对剩
余距离的估算值,而不是实际值,因此称为试探法。
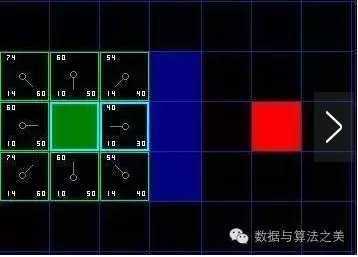
每个方格的左下角表示G;右下角表示H;左上角表示F
第六步:我们从openList中选择F值最小的节点,然后对其做以下操作:
1. 把该节点从openList中取出,放到closeList里;
2. 检查所有与它相邻的方格,忽略其中在closeList中或不可行走的方格;如果可行走的方格不在openList中,则把它们加入到openList中。把当前选定的节点设置为这些新加入的方格的父亲。
第七步:如果某个相邻的方格已经在openList中,则检查这条路是否更优。也就是经由当前节点(我们选中的方格)到达那个方格是否具有更小的G值,如果没有则不做任何操作。否则,如果G值更小
则把那个方格的父亲设置为当前方格(重新遍历那个方格的父亲)。然后重新计算那个方格的F值和G值。并且走第八步。
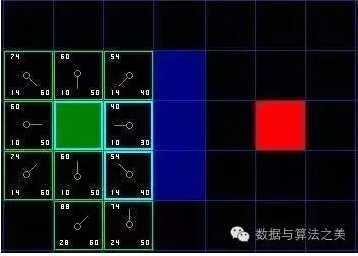
第八步:因为再次遍历我们的openList,而左边的那个节点已经在closeList里了,所以只有7个节点了。我们需要选择F值最小的那个。当方格中有相同的F值时,从速度上考虑,选择最后加入openList的方格更快。
我们选择起点A右下方的方格。
第九步:不断重复上个过程,直到把终点也加入到openList中,此时如下图所示:
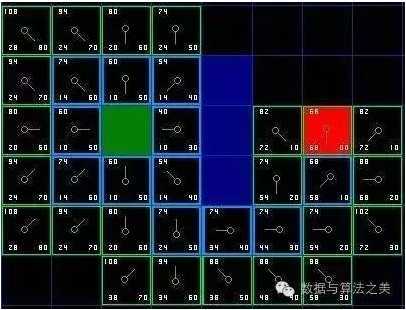
那么我们怎么样去确定实际路径呢?很简单,从终点开始,按着箭头向父节点移动,这样就被带回了起点,也就是路径。
以上是关于A*算法介绍的主要内容,如果未能解决你的问题,请参考以下文章