Roboware Studio 简单使用与调试(ROS kinetic)
Posted rjjhyj
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Roboware Studio 简单使用与调试(ROS kinetic)相关的知识,希望对你有一定的参考价值。
基于网址:https://blog.csdn.net/qq_41450811/article/details/80305846
使用过程中进行补充(红色字体),整理如下:
1、新建工作区,选择用户目录下 ,名称 :catkin_ws
2、选择Release , 然后在上面菜单栏ROS点击构建:或者那个小锤子
3、测试ros是否正常运行,运行roscore :
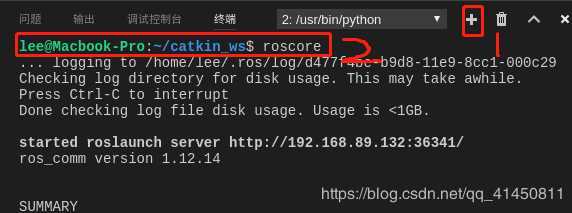
如右上角的加号可以添加终端,因ros使用一个终端是不够的。
4、测试正常~! ctrl + c 取消
5、新建一个包
6、catkin_make
package.xml报错如下:run_depend出错
修改:
<exec_depend>message_runtime</exec_depend> 运行成功
网上说:<run_depend>message_runtime</run_depend>
<build_depend>message_generation</build_depend>将这两行删掉是不对的。
7、编辑依赖的ROS包列表
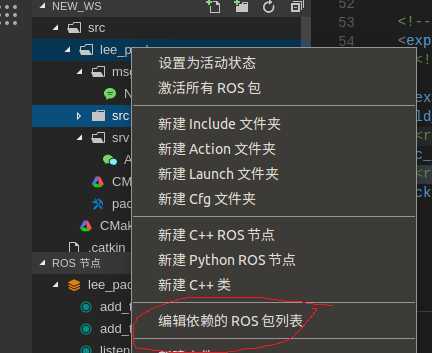

8、CMakeLists.txt 自动更新依赖关系
9、在工作空间编译一下lee_package: catkin_make 或小锤子
10、新建msg、srv按正常操作
11、$ rosmsg show Num.msg 报错:用$ source ~/catkin_ws/devel/setup.bash 即可
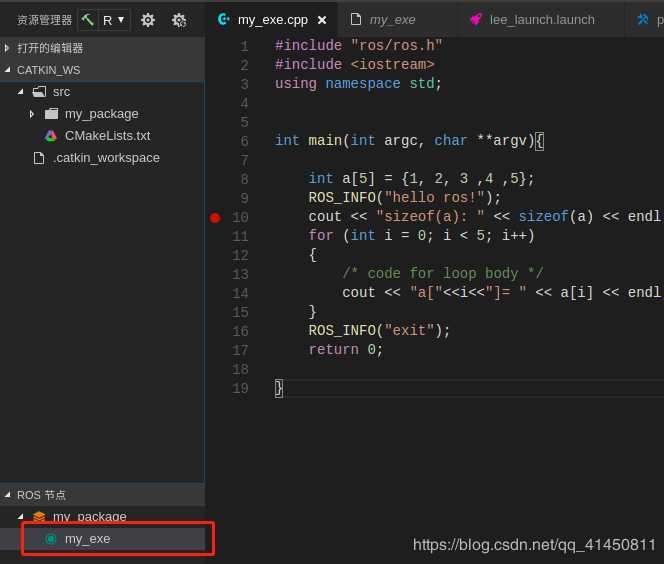
12、创建ROS消息和ROS服务 .cpp
右键点击 ROS 包目录下的“src”,选择“新建 CPP 源文件”,输入文件名(如“animal”)
后,点击回车键,会弹出以下列表:
-my_library1
-my_library2
-my_executable1
-加入到新的库文件中
-加入到新的可执行文件中
其中 my_library1、my_library2、my_executable1 为已建立的库和可执行文件(节点),以列表的形
式列出。选择对应的条目(如 my_executable1 ),CPP 文件会添加到 my_executable1 可执行文件
中。此时 CMakeLists.txt 文件会自动更新。
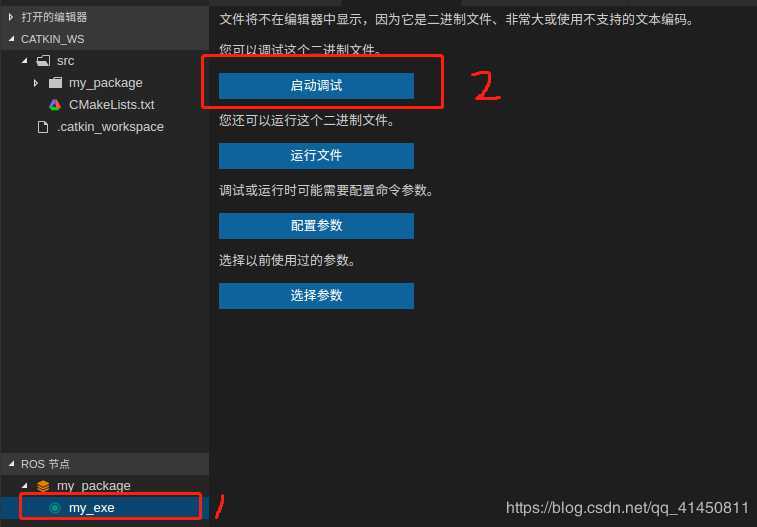
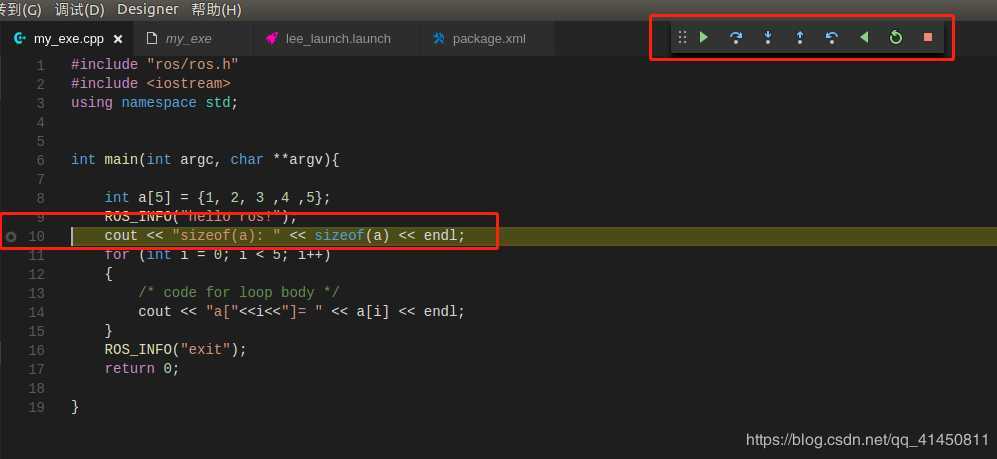
13、debug调试断点无效
锤子旁边的release改为debug
代码:在src下的cmakelist.txt 文件sudo gedit CMakeLists.txt
这句set(CMAKE_BUILD_TYPE "Release") -----release改为debug
其他没问题
以上是关于Roboware Studio 简单使用与调试(ROS kinetic)的主要内容,如果未能解决你的问题,请参考以下文章