图的基本概念
图是点和边组成的集合体,G=<V,E>;
V是点集
E是边集
有向边,有向图
无向边,无向图
无权、点权、边权、负权
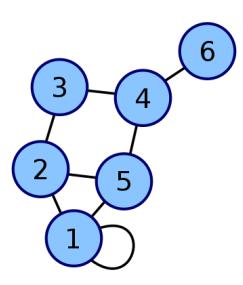
环、自环、重边、有向无环图(DAG)
路径、简单路径:没有经过重复的点、连通
树:n个点n-1条边的连通图、完全图:任何两点间都有一条边(无向图)、竞赛图:将完全图上的每条边定一个方向、基环树:有一个环,其他全是树、仙人掌:可以存在环,但是每一条边,至多只存在于一个环中
图的输入方式
最常见的输入方式是用 1 - N 表示顶点,并逐行给出 M 条边所连接的两点和边权大小。
N M
u1 v1 w1
u2 v2 w2
. . .
um vm wm
如果有点权,一般会用一行 N 个数表示每个点的权值大小。
p1 p2 . . . pn
邻接矩阵是最简单的图存储方式。
对于 N 个点的图,用 N × N 的二维数组记录两点之间是否有边相连,以及边权大小。
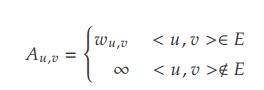
空间复杂度 O(N^2)
对于边不存在的情况,可能采用 ∞,也可能使用 0 或 -1 等等特殊值,视具体情况而定。
对于有重边的情况,可能不能完整保留所有边的信息。
邻接表是更为常用的图存储方式。
对每个点 u 用不定长度数组或链表存储所有以其为起点形如< u, v > 的边。
无向图双向边拆分为两条单向边。
不定长数组
链表
空间复杂度 O(N + M)
图的遍历方法:
广度优先搜索bfs 队列
深度优先搜索dfs 栈
广度优先遍历 BFS
用队列实现,按照一定顺序依次访问每个结点。
创建一个包含起点的队列
取出队首结点,将相邻的未入队结点加入队列
重复上一步直到所有结点都被遍历过
适用于无权图上单源最短路问题
深度优先遍历 DFS
用栈(递归函数)实现,按照一定顺序依次访问每个结点。
从起点 s 开始遍历
在遍历到 u 时,递归遍历所有未被访问的相邻结点 v
当遍历 s 的函数退出时,所有结点都被遍历
BFS 和 DFS 是最基础的图的遍历方法,更多的遍历方法基本都是基于此两者
BFS 和 DFS 都可以用来判断图连通,或者求连通子图
两者各有优劣,要根据实际情况选择
结合搜索的知识
三种DFS序
前序遍历
中序遍历
后续遍历
一些简单的例题
例1
1.给定一个有向图,边权为1或2,求单源最短路。
(不能用floyd、dijkstar、spfa等)
开三个队列,首先全部放在距离为0的队列中,然后枚举一个点的所有临点,如果距离为1,扔到距离为1的队列中,如果距离为2扔到距离为2的队列中
创建三个集合, Q0 表示当前层, Q1 表示距离为 1 的层,Q2 表示距离为 2 的层,初始 Q0 = {s}, Q1 =∅, Q2 =∅
依次取出 Q0 中的点,将其邻点放入对应的 Q1 或 Q2 中
然后Q0 =Q1, Q1 = Q2, Q2 = ∅
注意一个点可能和当前层既有长度为 1 的边,又有长度为 2 的边,应当将其加入 Q1 而非 Q2。
例2
给出一个有向图和起点 s,对每条边 < u, v > 回答,如果删去这条边,从 s 到 v 的最短路长度是否会改变。无权的;
一遍bfs求从s点出发的到每个点的单源最短路d[i],对于一条边<u,v>,如果d[v]=d[u]+1,说明是最短路上的边,保留下来;
一个点的入度>=2,就不会改变,否则会改变
拓扑排序
有向无环图的拓扑排序即将所有顶点排为线性序列,使得对于任意的 < u, v >∈ E,都有 u 在线性序列中出现于 v 之前。
有向图中如果有环,则一定不存在拓扑排序;如果没有环,则一定存在拓扑排序。
选取一个入度为 0 的点记为 u
将 u 添加到线性序列末端
删去所有 u 的出边
重复上述步骤直到所有点都被加入序列
例1
有 n 项任务,有 m 个限制,第 i 个限制要求执行任务 ui 之前必须要完成任务 vi。请问是否存在合适的任务执行顺序,满足所有的限制。
将每个任务视为一个点,任务之间的依赖构成了有向边。如果该有向图中没有环,则存在拓扑排序,而拓扑排序就是可行的任务执行顺序;如果该有向图中存在环,则无解。
例2
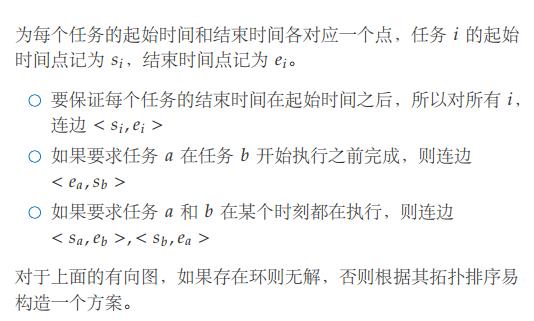
有 n 项任务,有 m 个限制,限制有如下两种:
执行 u 任务之前必须要完成 v 任务
存在某一时刻, u 和 v 任务都在执行
请问是否存在安排每个任务起始时间和结束时间的方案,满足所有的限制
对每个线段,用两个点来表示。一个表示其实时间,一个表示结束时间;
对于任务1,也就是对u的开始时间的点向v的结束时间的点连边;
对于任务2,u的开始时间要在v的结束时间之后,v的开始时间也要在u的结束时间之后;
然后对每条线段,还要从这条线段的结束点向开始点连一条边;
例3
对于带边权的有向无环图,求单源最短路。
记起点为 s,拓扑排序形如$ a_1, a_2, . . . , a_t, s, b_1, b_2, . . . , b_k$,记点i 的最短路为 di。
\\(d[v]=\\min\\limits_{<u,v>∈E}\\{d[u]+w_{u,v}\\}\\)
从 s 出发无法走到 \\(a_1, a_2, . . . , a_t\\),对这些点其最短路为 ∞
从 s 出发走到 bi 之前一定只经过 \\(b_1, b_2, . . . , b_{i-1}\\),即 dbi 的求解依赖于 \\(d_{b_1}, d_{b_2}, . . . , d_{b_{i-1}}\\)
按顺序依次求解 ds, db1, db2, . . . , dbk 即可
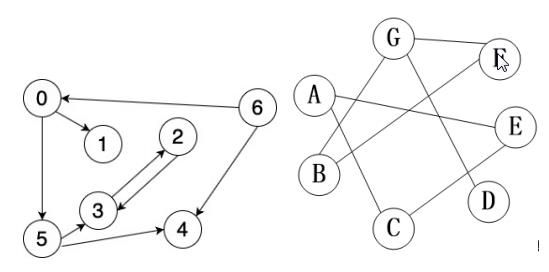
POJ 1094 Sorting It All Out
An ascending sorted sequence of distinct values is one in which some form of a less-than operator is used to order the elements from smallest to largest. For example, the sorted sequence A, B,C, D implies that A < B, B < C and C < D. in this problem, we will give you a set of relations of the form A < B and ask you to determine whether a sorted order has been specifed or not.
由一些不同元素组成的升序序列是可以用若干个小于号将所有的元素按从小到大的顺序 排列起来的序列。例如,排序后的序列为 A, B, C, D,这意味着 A < B、 B < C 和 C < D。在本题中,给定一组形如 A < B 的关系式,你的任务是判定是否存在一个有序序列。输出到哪一项可以确定顺序或者在这一项最先出现冲突,若所有的小于关系都处理完了都不能确定顺序也没有出现冲突,就输出不能确定。
冲突:拓扑排序排不出来就是冲突的(有环);
拓扑排序时,队列中永远没有出现大于一个元素的时候,就是唯一确定的;
不确定时,即队列中有时有>1个点;
BZOJ 2200 道路和航线
FJ 正在一个新的销售区域对他的牛奶销售方案进行调查。他想把牛奶送到 T 个城镇 (1 ≤ T ≤ 25000),编号为 1 到 T。这些城镇之间通过 R 条道路 (1 ≤ R ≤ 50000) 和 P 条航线(1 ≤ P ≤ 50000) 连接。每条道路 i 或者航线 i 连接城镇 Ai 到Bi,花费为 Ci。对于道路, 0 ≤ Ci ≤ 10000; 然而航线的花费很神奇,花费 Ci 可能是负数 (-10000 ≤ Ci ≤ 10000)。道路是双向的,可以从 Ai 到 Bi,也可以从 Bi 到 Ai,花费都是 Ci。然而航线与之不同,只可以从 Ai 到 Bi。事实上,由于最近恐怖主义太嚣张,为了社会和谐,出台了一些政策保证:如果有一条航线可以从 Ai 到 Bi,那么保证不可能通过一些道路和航线从 Bi 回到Ai。(有向边不存在于任何一个环,环都是正权无向边)由于 FJ 的奶牛世界公认〸分给力,他需要运送奶牛到每一个城镇。他想找到从发送中心城镇 S 把奶牛送到每个城镇的最便宜的方案,或者知道这是不可能的。 (求从s出发到某个点的单源最短路);O(nlogn)
把所有无向边加进去,形成若干连通块,看成一个大的点,然后加入有向边,形成一个DAG,如果有连通块的入度为0,直接连通块内跑dijkstar,有向边按拓扑序dp,更新dis,连通块内部使用dijkstar来做;
注意到如果有一条航线可以从 Ai 到 Bi,那么保证不可能通过一些道路和航线从 Bi 回到 Ai。
换言之,不存在包含航线(负权单向边)的环。
首先加入所有正权无向边,找出所有连通块,每个连通块缩为一个点。再加入所有单向边,此时图一定为 DAG。
在 DAG 上用 BFS 更新最短路,在正权无向边组成的连通块(缩点)内部使用 Dijkstra 更新最短路。
最短路
全局最短路 Floyd
单源最短路 Dijkstra SPFA Bellman-Ford
Floyd
基于动态规划, Fk,u,v, 表示使用点 1, 2, . . . , k 时,点 u 到点v 的最短路
从小到大枚举 k, u 和 v 之间的最短路要么不经过 k,要么经过 k 一次且除此之外只包含前 k - 1 个点
\\(F_{k,u,v} =min\\{F_{k-1,u,v}, F_{k-1,u,k} + F_{k-1,k,v}\\}\\)
for(int k=1;k<=n;k++)//k要写外面!
for(int i=1;i<=n;i++)
for(int j=1;j<=n;j++){
f[k][i][j]=min(f[k][i][j],f[k-1][i][k]+f[k-1][k][j]);
f[i][j]=min(f[i][j],f[i][k]+f[k][j]);
}
易见,使用二维数组不断覆盖更新即可。
时间复杂度 \\(O(N^3)\\)
空间复杂度 \\(O(N^2)\\)
可以处理含有负权边的情况,如果含有负环,则存在 i 使得
\\(F_{i,i} < 0\\)。
传递闭包?
判断两点是否可达:
\\(bool \\ f[i][j]\\)表示i到j是否可达:
for(int k=1;k<=n;k++)
for(int i=1;i<=n;i++)
for(int j=1;j<=n;j++)
f[i][j]|=f[i][k]&f[k][j];
预防毒瘤出题人:
for(int k=1;k<=n;k++)
for(int i=1;i<=n;i++)if(f[i][k])
for(int j=1;j<=n;j++)if(f[k][j])
f[i][j]=true;
Dijkstar
适用于没有负权边的图。
将所有点分为两个集合,最短路确定的集合 S 和最短路未确定的集合 T,初始 S ={s}
求 T 中每个点 v 的当前最短路
\\(d_v=\\min_{<u,v>∈E,u∈S}\\{d_u + w_{u,v}\\}\\)
取出 T 中 \\(d_v\\) 最小的点,其最短路一定就是 \\(d_v\\),将其加入 S
不断重复上面的操作,直到所有点的最短路都确定
朴素写法时间复杂度较劣,可以采用堆优化至$ O((N + M)logN) $
using pii=pair<int,int>
priority_queue<pii,veector<pii>,greater<pii> > q;
void dijkstar(){
memset(dis,inf,sizeof(dis));
q.push(make_pair(dis[s]=0,s));
while(!q.empty()){
int u=q.top().second;
int d=q.top().first;
q.pop();
if(d!=dis[u]) continue;
for(int i=head[u],v,w;i;i=edge[i].next){
if(v=to[i],w=edge[i].dis,dis[v]>d+w)
q.push(make_pair(dis[v]=d+w,v));
}
}
}
Bellman-Ford
初始令 \\(d_s\\) = 0,其余 \\(d_i\\) = ∞
依次使用每一条边 < u, v > 更新,$ d_v = min{d_v, d_u + w_{u,v}}$
不断循环直到所有 \\(d_i\\) 都不会更新
因为任何一条最短路包含至多 n - 1 条边,没有负环则不超过 n 轮就会停止
时间复杂度 O(NM)
空间复杂度 O(N + M)
可以对包含负权边的图使用,如果存在负环,则循环超过 n 轮后依然不会停止,可以用来判断负环是否存在。
SPFA
考虑使用队列优化 Bellman-Ford 算法,如果更新了 \\(d_u\\),则将 u入队。每次取队首 u 更新其邻点 v 的 \\(d_v\\)。
最差复杂度O(NM);