二十三uevnet机制和U盘自动挂载
Posted lioker
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了二十三uevnet机制和U盘自动挂载相关的知识,希望对你有一定的参考价值。
一、uevent机制
在分析之前,我们首先要知道uevent作用是什么。在此我们先来看一个uevent机制的框架图:
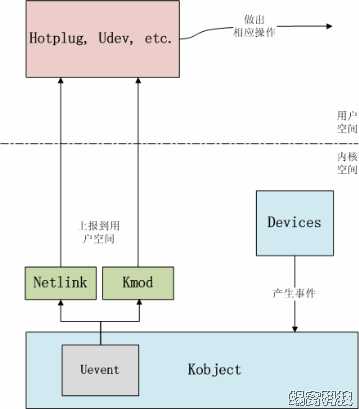
该图片来自:Linux设备模型(3)_Uevent
通过图片我们可以确定uevent的作用:设备产生上报事件时会触发uevent接口,uevent则通过netlink和kmod这两种方式把事件上报到用户空间。kmod会直接调用用户空间的程序,netlink只是将事件上报到用户空间。
之前我们分析的大部分设备驱动都会在/dev/目录下创建节点给用户使用。那么在我们调用device_create()后内核会做什么呢?
现在我们来分析device_create()的详细调用关系:
device_create() -> va_start(vargs, fmt); /* 初始化va_list可变参数变量 */ -> dev = device_create_vargs(class, parent, devt, drvdata, fmt, vargs); -> dev = kzalloc(sizeof(*dev), GFP_KERNEL); -> dev->devt = devt; /* 设置device成员 */ -> retval = device_register(dev); -> device_initialize(dev); /* 初始化device链表头 */ -> device_add(dev); /* 添加device */ -> kobject_uevent(&dev->kobj, KOBJ_ADD); -> kobject_uevent_env(kobj, action, NULL); -> env = kzalloc(sizeof(struct kobj_uevent_env), GFP_KERNEL); /* 分配环境变量 */ -> if (uevent_helper[0] && !kobj_usermode_filter(kobj)) -> argv [0] = uevent_helper; /* 下面调用的就是uevent_helper程序 */ -> call_usermodehelper(argv[0], argv, env->envp, UMH_WAIT_EXEC); /* 调用应用程序argv[0] */ -> va_end(vargs);
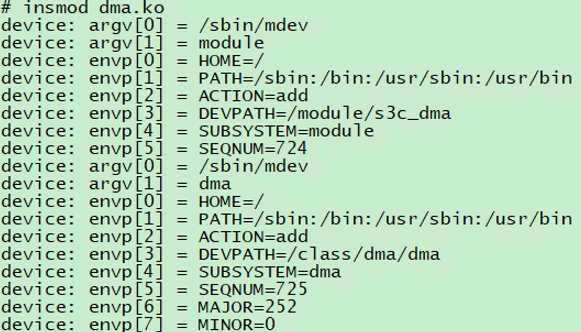
为了确定调用程序,我们可以在代码中添加打印语句,如8-14行:
1 if (uevent_helper[0] && !kobj_usermode_filter(kobj)) 2 char *argv [3]; 3 4 argv [0] = uevent_helper; 5 argv [1] = (char *)subsystem; 6 argv [2] = NULL; 7 8 int i; 9 for (i = 0; i < 2; ++i) /* 参数 */ 10 printk("device: argv[%d] = %s\\n", i, argv[i]); 11 12 for (i = 0; env[i]; ++i) /* 环境变量 */ 13 printk("device: envp[%d] = %s", i, env[i]); 14 15 16 retval = add_uevent_var(env, "HOME=/"); 17 if (retval) 18 goto exit; 19 retval = add_uevent_var(env, 20 "PATH=/sbin:/bin:/usr/sbin:/usr/bin"); 21 if (retval) 22 goto exit; 23 24 retval = call_usermodehelper(argv[0], argv, 25 env->envp, UMH_WAIT_EXEC); 26
重新编译烧写内核后,insmod某个模块后可以确定uevent_helper为/sbin/mdev
/sbin/mdev定义在busybox的mdev.c中:

我们使用SI4创建busybox工程后,打开mdev.c,分析mdev_main()函数:


1 int mdev_main(int argc, char **argv) 2 3 char *action; 4 char *env_path; 5 RESERVE_CONFIG_BUFFER(temp,PATH_MAX); 6 7 xchdir("/dev"); 8 9 if (argc == 2 && !strcmp(argv[1],"-s")) /* 判断参数个数,如果不是mdev -s进入if */ 10 struct stat st; 11 12 xstat("/", &st); 13 root_major = major(st.st_dev); 14 root_minor = minor(st.st_dev); 15 16 recursive_action("/sys/block", 17 ACTION_RECURSE | ACTION_FOLLOWLINKS, 18 fileAction, dirAction, temp, 0); 19 20 recursive_action("/sys/class", 21 ACTION_RECURSE | ACTION_FOLLOWLINKS, 22 fileAction, dirAction, temp, 0); 23 24 else /* 热拔插mdev -s */ 25 action = getenv("ACTION"); /* 设备驱动中ACTION = add */ 26 env_path = getenv("DEVPATH"); /* DEVPATH = /class/dma_test */ 27 if (!action || !env_path) 28 bb_show_usage(); 29 30 sprintf(temp, "/sys%s", env_path); /* temp = /sys/class/dma_test */ 31 if (!strcmp(action, "remove")) 32 make_device(temp, 1); 33 else if (!strcmp(action, "add")) 34 make_device(temp, 0); 35 36 if (ENABLE_FEATURE_MDEV_LOAD_FIRMWARE) 37 load_firmware(getenv("FIRMWARE"), temp); 38 39 40 41 if (ENABLE_FEATURE_CLEAN_UP) RELEASE_CONFIG_BUFFER(temp); 42 return 0; 43
此函数最终调用make_device(temp, 0)创建设备,调用层次如下:
make_device(temp, 0); -> device_name = bb_basename(path); -> if (ENABLE_FEATURE_MDEV_CONF) /* 如果配置了支持mdev.conf选项 */ -> fd = open("/etc/mdev.conf", O_RDONLY); /* 操作mdev.conf文件 */ -> if (!delete) /* 如果是创建设备节点 */ -> mknod(device_name, mode | type, makedev(major, minor) /* 创建节点 */
下面我们来看看如何使用mdev.conf,参考工程中mdev.txt文件:
如设置初始化脚本/etc/init.d/rcS:
Here‘s a typical code snippet from the init script: [1] mount -t sysfs sysfs /sys [2] echo /bin/mdev > /proc/sys/kernel/hotplug [3] mdev -s Of course, a more "full" setup would entail executing this before the previous code snippet: [4] mount -t tmpfs mdev /dev [5] mkdir /dev/pts [6] mount -t devpts devpts /dev/pts
/etc/ndev.conf文件格式:
the format: <device regex> <uid>:<gid> <octal permissions> [<@|$|*> <command>] The special characters have the meaning: @ Run after creating the device. $ Run before removing the device. * Run both after creating and before removing the device.
the format: <device regex> <uid>:<gid> <octal permissions> [<@|$|*> <command>] The special characters have the meaning: @ Run after creating the device. $ Run before removing the device. * Run both after creating and before removing the device.
其中,
<device regex>:正则表达式,可参考:正则表达式 - 语法 | 菜鸟教程
<uid>:用户ID
<gid>:组ID
<octal permissions>:/dev/dma_test的权限
<command>:命令
了解上面知识后,下一节开始编辑mdev.conf实现U盘自动挂载
二、编辑mdev.conf实现U盘自动挂载
在网络文件系统根目录中执行:
# vim etc/mdev.conf
添加一行:
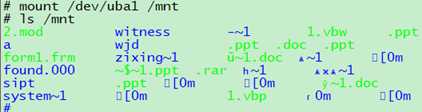
sda[1-9]+ 0:0 660 * if [ $ACTION = "add" ]; then mount /dev/$MDEV /mnt; else umount /mnt; fi
其中,
sda[1-9]+表示重复匹配1-9的数字多次
*表示创建设备节点之后和删除设备节点之前执行命令
命令表示如果ACTION是add,则挂载,否则取消挂载
效果如下图,乱码是由于开发板不支持中文:
以上是关于二十三uevnet机制和U盘自动挂载的主要内容,如果未能解决你的问题,请参考以下文章