文献阅读报告 - Social LSTM:Human Trajectory Prediction in Crowded Spaces
Posted sinoyou
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了文献阅读报告 - Social LSTM:Human Trajectory Prediction in Crowded Spaces相关的知识,希望对你有一定的参考价值。
概览
简述
文献所提出的模型旨在解决交通中行人的轨迹预测(pedestrian trajectory prediction)问题,特别是在拥挤环境中——人与人交互(interaction)行为常有发生的地方。
文献构建的数据驱动模型,利用在序列预测上表现突出的LSTM模型以行人为单位进行轨迹预测,同时为了解决多个行人的LSTMs之间无法捕捉行人空间中交互的问题,模型在LSTMs每一步运行之间加入了“Social”池化层,池化层将整合其他行人的隐藏状态(Hidden State),并作为隐藏状态一部分传递下去,最终形成模型Social LSTM。
由于池化层的引入,使得LSTMs间出现动态数据(在模型运行中才能得到)的依赖,模型训练时需要有多个LSTMs同步并行运行和反向传播,为了简化训练压力,文献也提出了O-LSTM模型,该模型可针对每位行人的轨迹进行独立的训练。
最后,文献使用了ETH和UCY两个公开数据库数据,从轨迹平均误差、重点误差和轨迹非线性区间误差三个指标衡量多重模型的预测性能,得出Social-LSTM和O-LSTM性能整体上优于其他模型的结论。
相关研究
前人对交互环境下的轨迹预测已经提出了多种方法,例如以Social Force为基础的将行人行动模型之间刻画吸引力和排斥力的模型,已发展出了相当多的方法,然而文献中提到这些方法大都受限于两个方面:
- 需要手工构造函数以刻画交互而不是数据驱动,导致模型的环境适应性差,并且只能较好捕捉简单的交互情景。
- 模型所针对的通常是距离很相近的情景,而没有考虑更远距离可能发生的交互。
数据库
数据源:ETH、UCY
数据格式(经处理和提取以适应此训练任务)
? 元数据标签:time frame(时间片序号)、pedestrian ID(行人标识符)、position x、position y
? 时间精度:time frame之间间隔均为10的倍数,精度为0.4秒
? 位置精度:训练数据中x和y均经过标准化处理,\\(0 <= x,y <= 1\\) 。源数据中x,y,z精度为米。
横向评估标准
- Average displacement error:即均方误差(MSE)。\\(MSE = \\frac1N \\sum_i=1^n(Y_i - \\hat Y_i)^2\\)
- Final displacement error:终点平方误差。\\(DSE = (Y_T_pred - \\hat Y_T_pred)^2\\)
- Average non-linear displacement error:MSE的改良版,误差计算周期不再是整个周期,而是轨迹有明显非线性变化的区域,旨在突出Social LSTM对非线性轨迹预测的效果。非线性区域判断依据是自适应阈值的轨迹二阶导数,但并未在源代码中找到相关实现。
Social LSTM模型简介
LSTM
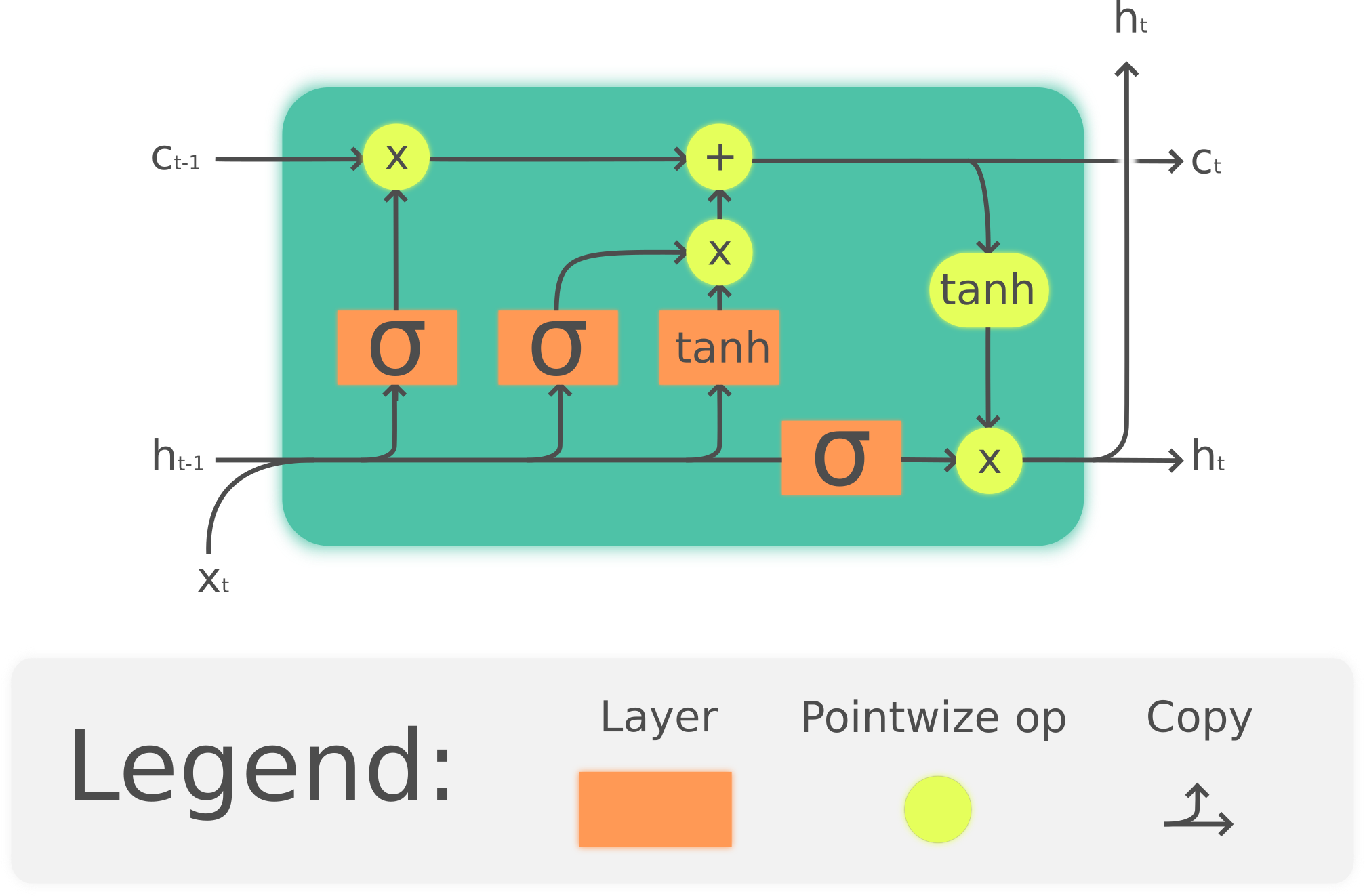
LSTM模型被证明为解决序列预测问题的有效方式,由一个LSTM Cell经过多次迭代,每步迭代中都会接受输入和产生输出,从而产生序列型输出。有关RNN及LSTM标准模型本文不再详细介绍,此处仅说明实际应用时的要点。
- 建模方法:一“条”LSTM模型对应一个行人的轨迹序列,所有LSTM模型都共用同一个LSTM Cell。
- 输入输出:不考虑Minibatch的实际训练方法对数据维度的影响:LSTM Cell每步运行的输入数据格式为“由[x,y]经embedding后得到的向量”;LSTM Cell每步运行的输出数据经线性变换后成为\\([ \\mu_x, \\mu_y, \\sigma_x, \\sigma_y, \\rho ]\\),之所以不是平面二维的2个数据,是由于原文采用了输出数据分布为二维高斯分布的假设,5个数据恰对应高斯分布参数。
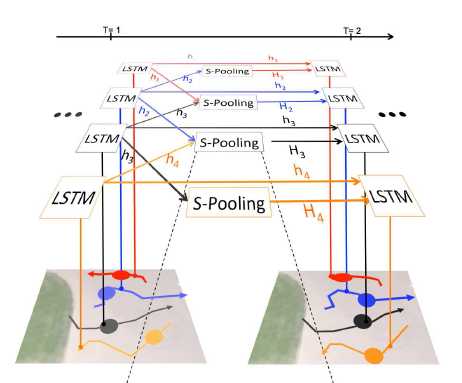
- 池化层引入必要性:由建模方法和输入输出可知,在现有LSTMs模型中的LSTM之间完全独立,运行前中后都没有数据信息的共享,因此无法表现行人间交互信息。为此,Social LSTM在上图所示的\\(h_1, h_2, h_3, ..., h_t\\)上进行改动以达到每“条”LSTM运行一步后都会进行信息共享,Social LSTM Cell的隐藏状态将由池化层经处理整合后得到。
Social Tensor
Social Tensor是使得每位行人的LSTM模型进行信息交换的途径,实质是一个池化层,每个行人\\(i\\)在每个时间点\\(t\\)均对应一个Social Tensor-\\(H^i_t\\),用于记录在该行人划定的范围\\(Z^i_t\\)中,其他行人的信息,并作为行人\\(i\\)隐藏状态的一部分,参与其下一步轨迹预测从而起到传递行人间交互信息的作用。
量化描述:
Shape : [\\(N_0\\), \\(N_0\\), \\(D\\)](其中\\(N_0\\)是\\(Z_i\\)区域的进一步等距划分,\\(D\\)是隐藏状态 Hidden State的维度大小)
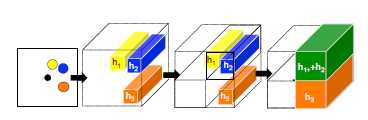
数据组成:每个\\(H^i_t\\)均由其他LSTM模型的\\(h^i_t\\)按一定策略加和。首先,只有处在\\(Z^t_i\\)区域中的行人的LSTM模型的\\(h^i_t\\)会被累积;其次,\\(Z_t^i\\)区域存在进一步分区,对于被累积的\\(h^i_t\\),其会被累加至对应的分区上。
\\[H_t^i(m,n,:) = \\sum_j \\in N_i 1_mn[x_t^j - x_t^i, y_t^j - y_t^i]h_t-1^j\\]
其中,\\(1_mn[...]\\)是01函数用于判断是否处在区域中,\\(h_t-1^j\\)是隐藏状态,\\(N_i\\)是相邻行人。
Occupancy Map Pool
Social Tensor池化的简化版,使得模型训练时无需同时处理所有的轨迹,下述公式也可看出Tensor中不再统计隐藏状态的值,而只统计行人数量。
\\[ O_t^i(m,n,:) = \\sum_j \\in N_i 1_mn[x_t^j - x_t^i, y_t^j - y_t^i]\\]
研究拓展方向
- 拓展模型至多类别道路对象(行人、自行车、滑板等),在Occupancy Map 中有自己的标签。
- 将场景的静态图片作为Social LSTM模型的额外输入,在描述Person-Person的交互的基础上,描述Person-Space的交互。
以上是关于文献阅读报告 - Social LSTM:Human Trajectory Prediction in Crowded Spaces的主要内容,如果未能解决你的问题,请参考以下文章