R2CNN论文思路记录
Posted ywheunji
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了R2CNN论文思路记录相关的知识,希望对你有一定的参考价值。
Rotational region cnn
我们的目标是检测任意方向的场景文本,与RRPN类似,我们的网络也基于FasterR-CNN ,但我们采用不同的策略,而不是产生倾斜角度建议。
我们认为RPN有资格生成文本候选,并根据RPN提出的候选文本预测方向信息
检测步骤:

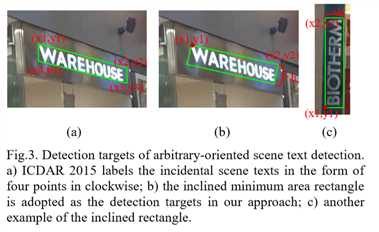
如图所示:a.原图片
b.通过rpn得到的text regions
c.预测轴对齐框和倾斜框
d.对倾斜框进行非极大值抑制得到预测结果
整个检测网络的结构如图:
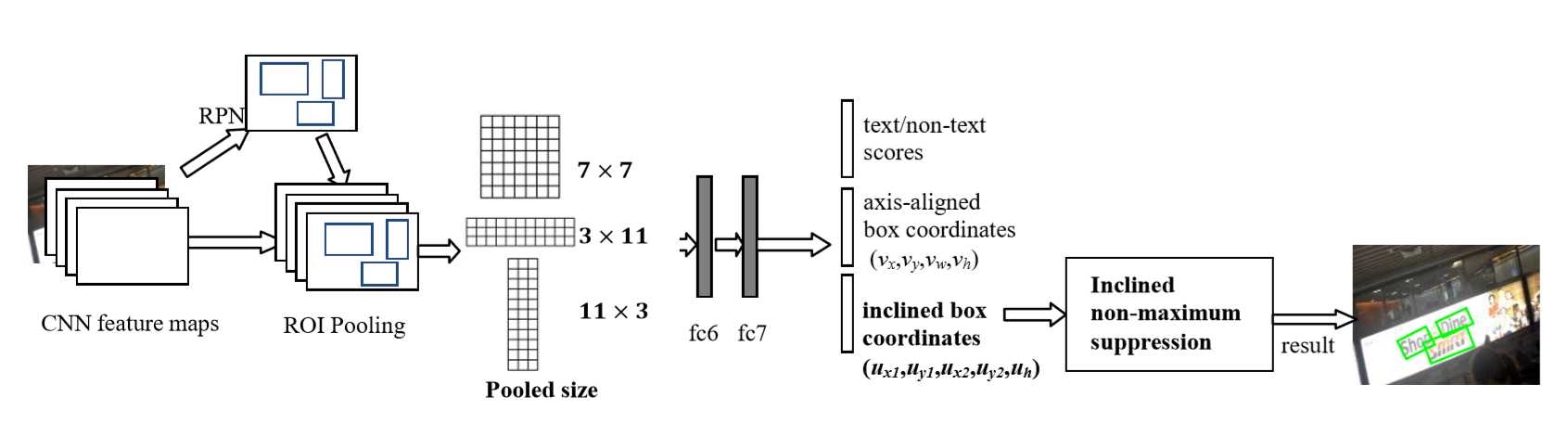
提取特征的步骤跟之前的RCNN系列一样,基础CNN网络提取出特征,
然后由RPN提取出文本区域(RPN生成包围任意方向文本的轴对齐边界框),这里已经生成轴对齐框,送入ROI POOLING层进行多个尺度的池化操作(7*7,3*11,11*3)原先的Faster rcnn只有7*7,这三种是专门用来检测常见的文本框。并将pooled特征串联;
通过两个全连接层之后,进行
1.文本/非文本的分类
2.轴对齐框包围的倾斜框的预测,倾斜框的预测(x1,y1,x2,y2,h)这里解释下,倾斜框的坐标表示,通过矩形框顺时针的前两个点的坐标来确定一条线,然后通过h来确定宽度。
3.倾斜框的非极大值抑制,得到结果
倾斜框的坐标表示如图:
对于RPN做出的改动:
更多的小场景检测。通过在RPN中利用较小的anchor比例来解决这一问题。
在Faster R-CNN中的原始anchor 缩放是(8,16,32)
我们研究了两种策略:
a)将anchor比例缩放更改为较小的尺寸,并使用(4,8,16);
b)增加一个新的anchor缩放并利用(4,8,16,32)
对roi pooling做出的改动:
加入11*3和3*11,使用不同的roi pooling大小获取更多特征, pooled 特征被连接在一起以便进一步检测;
R2CNN的loss函数:
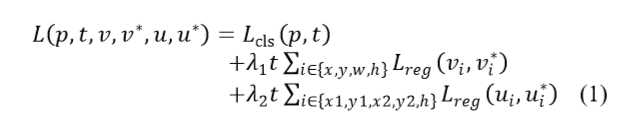
分为两部分,Lcls是分类的loss,下面分别是轴对齐框的Loss和倾斜框的Loss
以上是关于R2CNN论文思路记录的主要内容,如果未能解决你的问题,请参考以下文章