数字图像处理:基于霍夫变换的车道线检测
Posted kekeoutlook
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了数字图像处理:基于霍夫变换的车道线检测相关的知识,希望对你有一定的参考价值。
1 数字图像处理:基于霍夫变换的车道线检测
https://zhuanlan.zhihu.com/p/60190848
2 环境
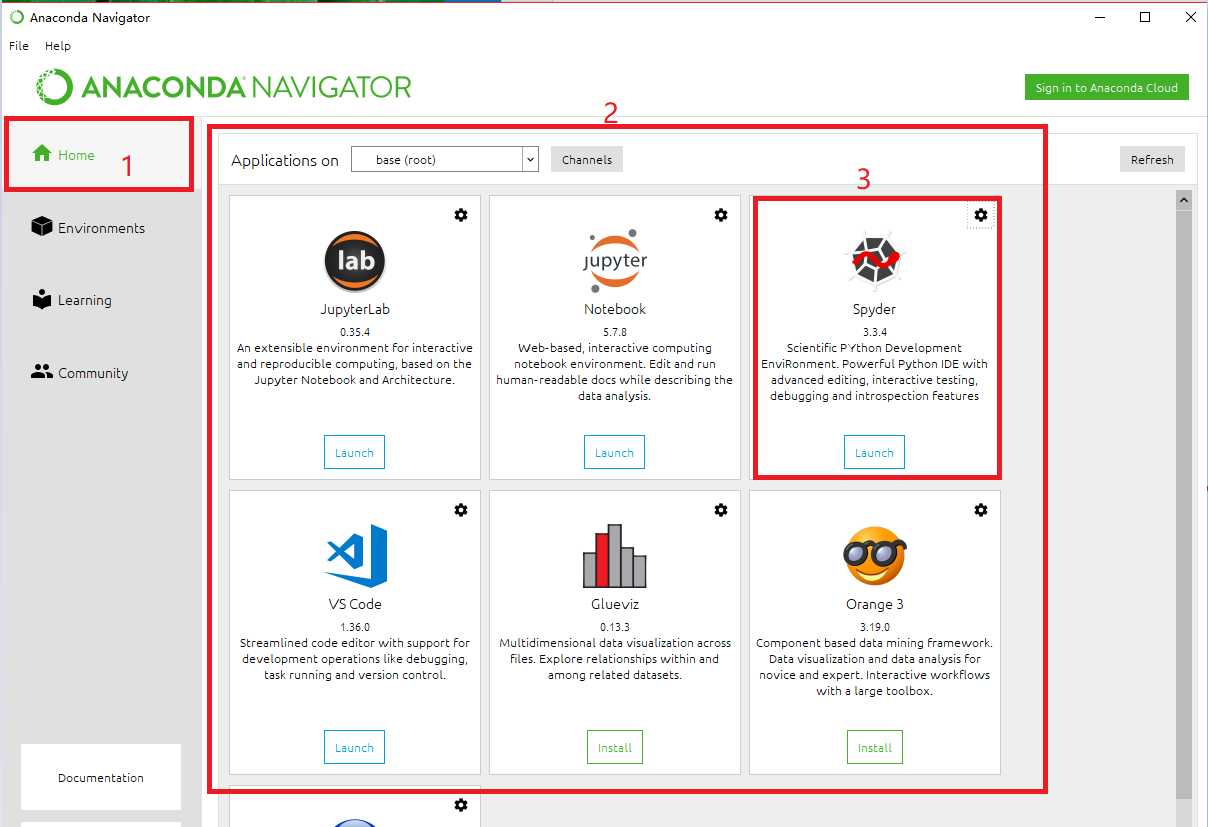
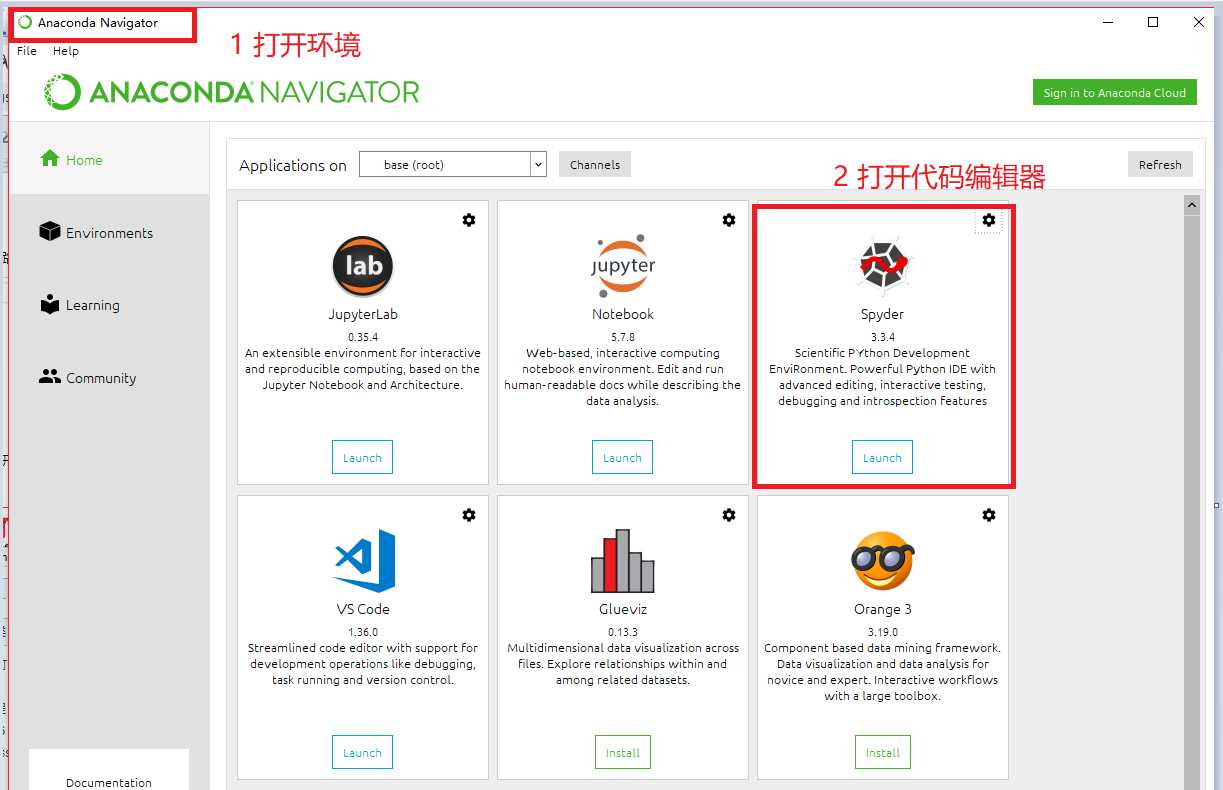
2-1 安装 Anaconda3 环境

2-2 在Anaconda3 环境种安装开发IDE spyder
刚开始找不到spyder,但是我安装完vs code之后就出现了选择安装spyder的图标
2-3 安装opencv和contrib扩展库
2-4安装matplotlib库
https://blog.csdn.net/weixin_42116878/article/details/80525811
、
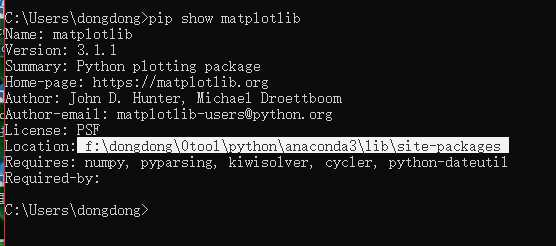
找不到 matplotlib问题
解决:
先查看matplotlib的安装路径
pip show matplotlib
然后将路径添加
import sys
sys.path.append(" F:/dongdong/0tool/python/anaconda3/lib/site-packages")
其中括号内的为上一步实际查出的安装路径。
3 工程代码
搞一个纯英文路径
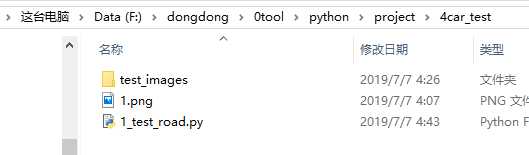
使用spyder打开
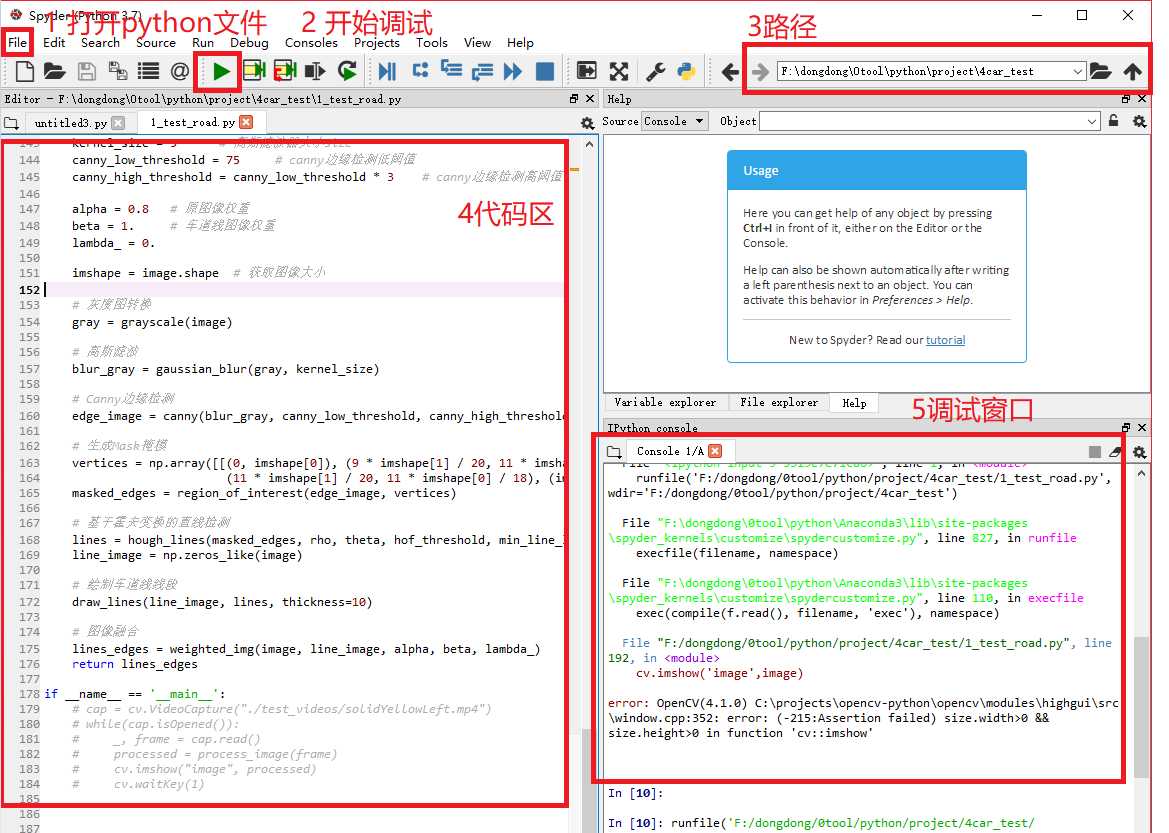
获取图片的时候路径地址,目前相对路径和绝对路径有问题,容易报错读不到图
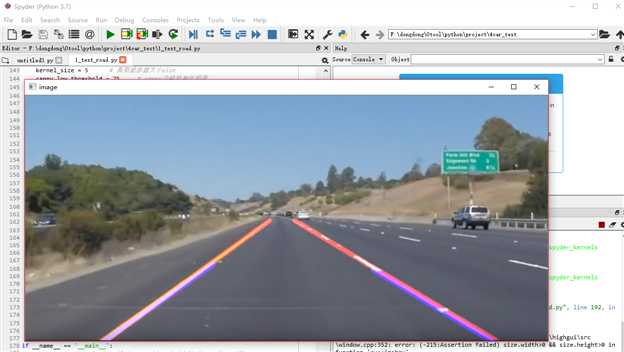
结果图
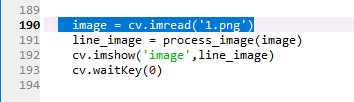
单张图
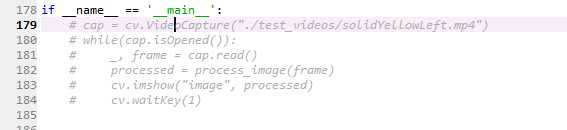
视频流
放开代码注释
#!/usr/bin/env python2
# -*- coding: utf-8 -*-
#import sys
#sys.path.append("F:/dongdong/0tool/python/Anaconda3/Lib/site-packages")
import numpy as np
import cv2 as cv
import matplotlib.pyplot as plt
# 灰度图转换
def grayscale(image):
return cv.cvtColor(image, cv.COLOR_RGB2GRAY)
# Canny边缘检测
def canny(image, low_threshold, high_threshold):
return cv.Canny(image, low_threshold, high_threshold)
# 高斯滤波
def gaussian_blur(image, kernel_size):
return cv.GaussianBlur(image, (kernel_size, kernel_size), 0)
# 生成感兴趣区域即Mask掩模
def region_of_interest(image, vertices):
mask = np.zeros_like(image) # 生成图像大小一致的zeros矩
# 填充顶点vertices中间区域
if len(image.shape) > 2:
channel_count = image.shape[2]
ignore_mask_color = (255,) * channel_count
else:
ignore_mask_color = 255
# 填充函数
cv.fillPoly(mask, vertices, ignore_mask_color)
masked_image = cv.bitwise_and(image, mask)
return masked_image
# 原图像与车道线图像按照a:b比例融合
def weighted_img(img, initial_img, a=0.8, b=1., c=0.):
return cv.addWeighted(initial_img, a, img, b, c)
# def reset_global_vars():
#
# global SET_LFLAG
# global SET_RFLAG
# global LAST_LSLOPE
# global LAST_RSLOPE
# global LAST_LEFT
# global LAST_RIGHT
#
# SET_RFLAG = 0
# SET_LFLAG = 0
# LAST_LSLOPE = 0
# LAST_RSLOPE = 0
# LAST_RIGHT = [0, 0, 0]
# LAST_LEFT = [0, 0, 0]
def draw_lines(image, lines, color=[255,0,0], thickness=2):
right_y_set = []
right_x_set = []
right_slope_set = []
left_y_set = []
left_x_set = []
left_slope_set = []
slope_min = .35 # 斜率低阈值
slope_max = .85 # 斜率高阈值
middle_x = image.shape[1] / 2 # 图像中线x坐标
max_y = image.shape[0] # 最大y坐标
for line in lines:
for x1, y1, x2, y2 in line:
fit = np.polyfit((x1, x2), (y1, y2), 1) # 拟合成直线
slope = fit[0] # 斜率
if slope_min < np.absolute(slope) <= slope_max:
# 将斜率大于0且线段X坐标在图像中线右边的点存为右边车道线
if slope > 0 and x1 > middle_x and x2 > middle_x:
right_y_set.append(y1)
right_y_set.append(y2)
right_x_set.append(x1)
right_x_set.append(x2)
right_slope_set.append(slope)
# 将斜率小于0且线段X坐标在图像中线左边的点存为左边车道线
elif slope < 0 and x1 < middle_x and x2 < middle_x:
left_y_set.append(y1)
left_y_set.append(y2)
left_x_set.append(x1)
left_x_set.append(x2)
left_slope_set.append(slope)
# 绘制左车道线
if left_y_set:
lindex = left_y_set.index(min(left_y_set)) # 最高点
left_x_top = left_x_set[lindex]
left_y_top = left_y_set[lindex]
lslope = np.median(left_slope_set) # 计算平均值
# 根据斜率计算车道线与图片下方交点作为起点
left_x_bottom = int(left_x_top + (max_y - left_y_top) / lslope)
# 绘制线段
cv.line(image, (left_x_bottom, max_y), (left_x_top, left_y_top), color, thickness)
# 绘制右车道线
if right_y_set:
rindex = right_y_set.index(min(right_y_set)) # 最高点
right_x_top = right_x_set[rindex]
right_y_top = right_y_set[rindex]
rslope = np.median(right_slope_set)
# 根据斜率计算车道线与图片下方交点作为起点
right_x_bottom = int(right_x_top + (max_y - right_y_top) / rslope)
# 绘制线段
cv.line(image, (right_x_top, right_y_top), (right_x_bottom, max_y), color, thickness)
def hough_lines(img, rho, theta, threshold, min_line_len, max_line_gap):
# rho:线段以像素为单位的距离精度
# theta : 像素以弧度为单位的角度精度(np.pi/180较为合适)
# threshold : 霍夫平面累加的阈值
# minLineLength : 线段最小长度(像素级)
# maxLineGap : 最大允许断裂长度
lines = cv.HoughLinesP(img, rho, theta, threshold, np.array([]), minLineLength=min_line_len, maxLineGap=max_line_gap)
return lines
def process_image(image):
rho = 1 # 霍夫像素单位
theta = np.pi / 180 # 霍夫角度移动步长
hof_threshold = 20 # 霍夫平面累加阈值threshold
min_line_len = 30 # 线段最小长度
max_line_gap = 60 # 最大允许断裂长度
kernel_size = 5 # 高斯滤波器大小size
canny_low_threshold = 75 # canny边缘检测低阈值
canny_high_threshold = canny_low_threshold * 3 # canny边缘检测高阈值
alpha = 0.8 # 原图像权重
beta = 1. # 车道线图像权重
lambda_ = 0.
imshape = image.shape # 获取图像大小
# 灰度图转换
gray = grayscale(image)
# 高斯滤波
blur_gray = gaussian_blur(gray, kernel_size)
# Canny边缘检测
edge_image = canny(blur_gray, canny_low_threshold, canny_high_threshold)
# 生成Mask掩模
vertices = np.array([[(0, imshape[0]), (9 * imshape[1] / 20, 11 * imshape[0] / 18),
(11 * imshape[1] / 20, 11 * imshape[0] / 18), (imshape[1], imshape[0])]], dtype=np.int32)
masked_edges = region_of_interest(edge_image, vertices)
# 基于霍夫变换的直线检测
lines = hough_lines(masked_edges, rho, theta, hof_threshold, min_line_len, max_line_gap)
line_image = np.zeros_like(image)
# 绘制车道线线段
draw_lines(line_image, lines, thickness=10)
# 图像融合
lines_edges = weighted_img(image, line_image, alpha, beta, lambda_)
return lines_edges
if __name__ == ‘__main__‘:
# cap = cv.VideoCapture("./test_videos/solidYellowLeft.mp4")
# while(cap.isOpened()):
# _, frame = cap.read()
# processed = process_image(frame)
# cv.imshow("image", processed)
# cv.waitKey(1)
image = cv.imread(‘1.png‘)
line_image = process_image(image)
cv.imshow(‘image‘,line_image)
cv.waitKey(0)
以上是关于数字图像处理:基于霍夫变换的车道线检测的主要内容,如果未能解决你的问题,请参考以下文章