[Udacity FCND] 坐标表示
Posted dm1299
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了[Udacity FCND] 坐标表示相关的知识,希望对你有一定的参考价值。
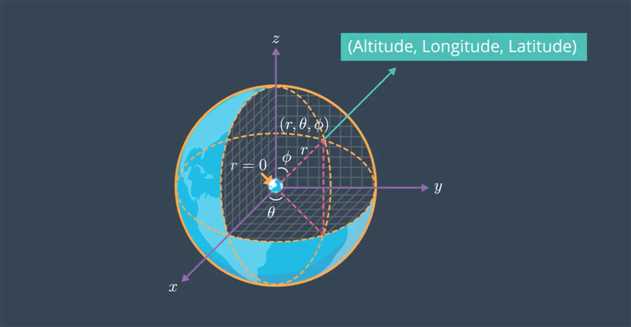
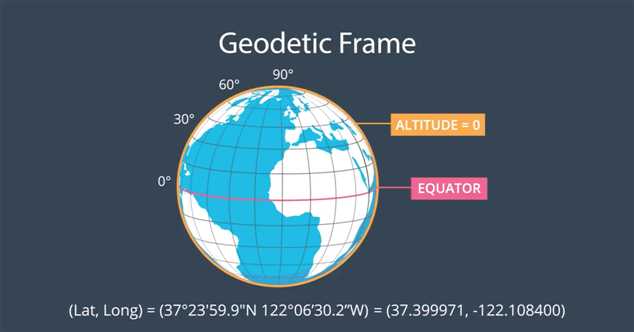
- Geodetic Frame
(r, θ, φ)表示海拔,经度和纬度。
在地球表面ALTITUDE=0
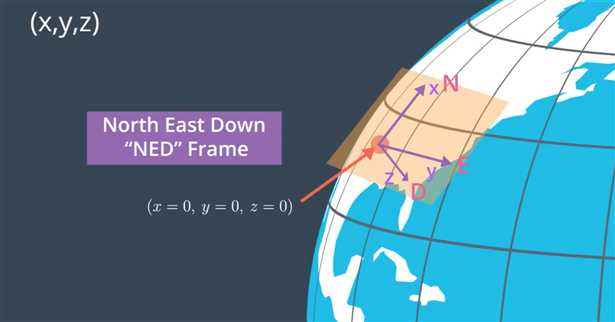
- NED Frame (North East Down)
在NED坐标系中,(x,y,z)表示与takeoff/home-based point的距离。
之所以z指向下方,是因为航空学中普遍使用右手坐标系。
如果z指向上方,则称为ECEF Frame。
- Geodetic与NED的转换
UTM坐标表示:在东西走向,全球一共有60个UTM zones,南北走向一共有24个zones。
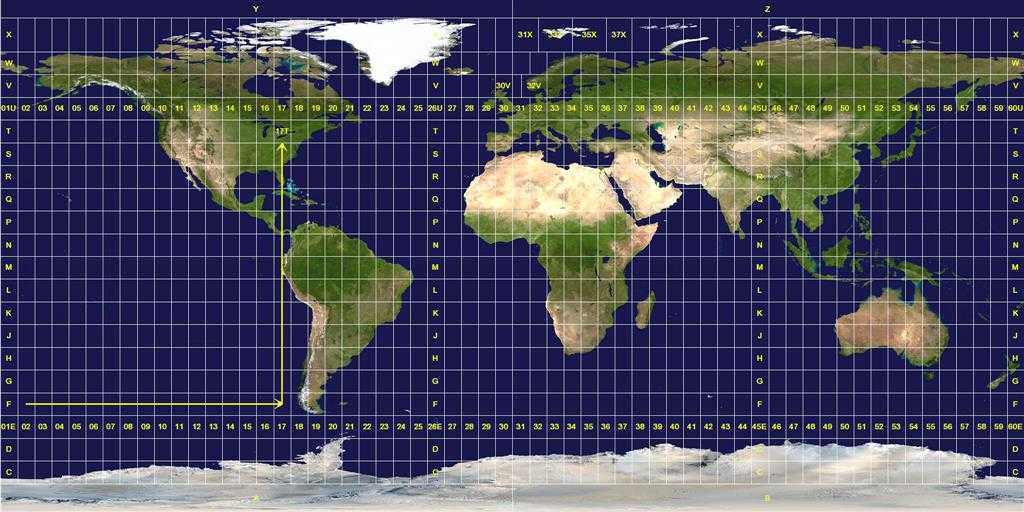
这里会使用Python的utm库实现转换。将GPS position (longitude, latitude, altitude) 转换为 local position (north, east, down)
def global_to_local(global_position, global_home): (east_home, north_home, _, _) = utm.from_latlon(global_home[1], global_home[0]) (east, north, _, _) = utm.from_latlon(global_position[1], global_position[0]) local_position = numpy.array([north - north_home, east - east_home, -global_position[2]]) return local_position将local position (north, east, down) 转换为 global position (long, lat, up)
def local_to_global(local_position, global_home): (east_home, north_home, zone_number, zone_letter) = utm.from_latlon(global_home[1], global_home[0]) (lat, lon) = utm.to_latlon(east_home + local_position[1], north_home + local_position[0], zone_number, zone_letter) global_position = numpy.array([lon, lat, -local_position[2]]) return global_position
以上是关于[Udacity FCND] 坐标表示的主要内容,如果未能解决你的问题,请参考以下文章