Android : Camera HAL3的参数传递(CameraMetadata)
Posted blogs-of-lxl
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Android : Camera HAL3的参数传递(CameraMetadata)相关的知识,希望对你有一定的参考价值。
一、camera_metadata简介
Camera API2/HAL3架构下使用了全新的CameraMetadata结构取代了之前的SetParameter/Paramters等操作,实现了Java到native到HAL3的参数传递。引入了管道的概念将安卓设备和摄像头之间联系起来,系统向摄像头发送 Capture 请求,而摄像头会返回 CameraMetadata,这一切建立在一个叫作 CameraCaptureSession 的会话中。
二、Framework到HAL层的转换
Camera2Client 使用 API1 传递参数采用的逻辑是还是在Java层预留了setParameters接口,只是当Parameter在设置时比起CameraClient而言,是将这个Parameter根据不同的TAG形式直接绑定到CameraMetadata mPreviewRequest/mRecordRequest/mCaptureRequest中,这些数据会由Capture_Request转为camera3_capture_request中的camera_metadata_t settings完成参数从Java到native到HAL3的传递。
但是在Camera API2下,不再需要那么复杂的转换过程,在Java层中直接对参数进行设置并将其封装到Capture_Request即可,即参数控制由Java层来完成。这也体现了API2中Request和Result在APP中就大量存在的原因。对此为了和Framework Native层相关TAG数据的统一,在Java层中大量出现的参数设置是通过Section Tag的name来交由Native完成转换生成在Java层的TAG。
(1)Java层对应代码位置:frameworks\\base\\core\\java\\android\\hardware\\camera2\\impl\\CameraMetadataNative.java
private <T> T getBase(Key<T> key)
int tag = nativeGetTagFromKeyLocal(key.getName());
byte[] values = readValues(tag);
if (values == null)
// If the key returns null, use the fallback key if exists.
// This is to support old key names for the newly published keys.
if (key.mFallbackName == null)
return null;
tag = nativeGetTagFromKeyLocal(key.mFallbackName);
values = readValues(tag);
if (values == null)
return null;
int nativeType = nativeGetTypeFromTagLocal(tag);
Marshaler<T> marshaler = getMarshalerForKey(key, nativeType);
ByteBuffer buffer = ByteBuffer.wrap(values).order(ByteOrder.nativeOrder());
return marshaler.unmarshal(buffer);
(2)Native层对应代码位置:frameworks/base/core/jni/android_hardware_camera2_CameraMetadata.cpp
static const JNINativeMethod gCameraMetadataMethods[] =
// static methods
"nativeGetTagFromKey",
"(Ljava/lang/String;J)I",
(void *)CameraMetadata_getTagFromKey ,
"nativeGetTypeFromTag",
"(IJ)I",
(void *)CameraMetadata_getTypeFromTag ,
"nativeSetupGlobalVendorTagDescriptor",
"()I",
(void*)CameraMetadata_setupGlobalVendorTagDescriptor ,
// instance methods
......
其中CameraMetadata_getTagFromKey是实现将一个Java层的string转为一个tag的值,如:android.control.mode。对比最初不同的Section name就可以发现前面两个x.y的字符串就是代表是Section name.而后面mode即是在该section下的tag数值,所以通过对这个string的分析可知,就可以定位对应的section以及tag值,这样返回到Java层的就是key相应的tag值了。继续追踪到 \\system\\media\\camera\\src\\camera_metadata.c:
// Declared in system/media/private/camera/include/camera_metadata_hidden.h const char *get_local_camera_metadata_tag_name_vendor_id(uint32_t tag, metadata_vendor_id_t id) uint32_t tag_section = tag >> 16; if (tag_section >= VENDOR_SECTION && vendor_cache_ops != NULL && id != CAMERA_METADATA_INVALID_VENDOR_ID) return vendor_cache_ops->get_tag_name(tag, id); else if (tag_section >= VENDOR_SECTION && vendor_tag_ops != NULL) return vendor_tag_ops->get_tag_name( vendor_tag_ops, tag); if (tag_section >= ANDROID_SECTION_COUNT || tag >= camera_metadata_section_bounds[tag_section][1] ) // 关键是camera_metadata_section_bounds这个数组,保存了各个tag的绑定信息 return NULL; uint32_t tag_index = tag & 0xFFFF; return tag_info[tag_section][tag_index].tag_name;
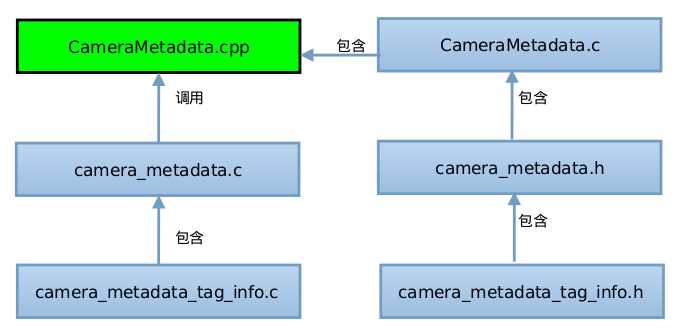
其他相关文件的调用关系如下图:
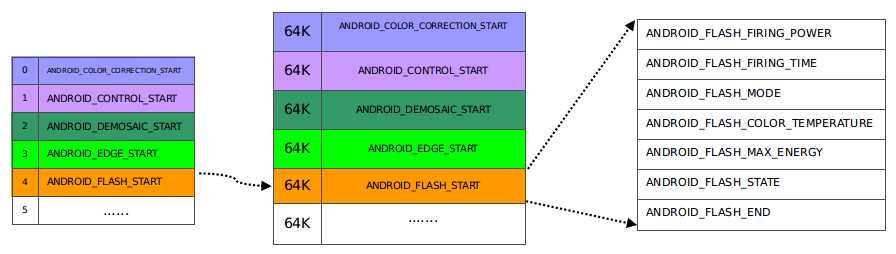
其中 camera_metadata_tags.h 包含了所有的基本宏,每一个section的大小是64K(每个枚举值左移16位):
/** * !! Do not include this file directly !! * * Include camera_metadata.h instead. */ /** * ! Do not edit this file directly ! * * Generated automatically from camera_metadata_tags.mako */ /** TODO: Nearly every enum in this file needs a description */ /** * Top level hierarchy definitions for camera metadata. *_INFO sections are for * the static metadata that can be retrived without opening the camera device. * New sections must be added right before ANDROID_SECTION_COUNT to maintain * existing enumerations. */ typedef enum camera_metadata_section ANDROID_COLOR_CORRECTION, ANDROID_CONTROL, ANDROID_DEMOSAIC, ANDROID_EDGE, ANDROID_FLASH, ANDROID_FLASH_INFO, ANDROID_HOT_PIXEL, ANDROID_JPEG, ANDROID_LENS, ANDROID_LENS_INFO, ANDROID_NOISE_REDUCTION, ANDROID_QUIRKS, ANDROID_REQUEST, ANDROID_SCALER, ANDROID_SENSOR, ANDROID_SENSOR_INFO, ANDROID_SHADING, ANDROID_STATISTICS, ANDROID_STATISTICS_INFO, ANDROID_TONEMAP, ANDROID_LED, ANDROID_INFO, ANDROID_BLACK_LEVEL, ANDROID_SYNC, ANDROID_REPROCESS, ANDROID_DEPTH, ANDROID_LOGICAL_MULTI_CAMERA, ANDROID_DISTORTION_CORRECTION, ANDROID_SECTION_COUNT, VENDOR_SECTION = 0x8000 camera_metadata_section_t; /** * Hierarchy positions in enum space. All vendor extension tags must be * defined with tag >= VENDOR_SECTION_START */ typedef enum camera_metadata_section_start ANDROID_COLOR_CORRECTION_START = ANDROID_COLOR_CORRECTION << 16, ANDROID_CONTROL_START = ANDROID_CONTROL << 16, ANDROID_DEMOSAIC_START = ANDROID_DEMOSAIC << 16, ANDROID_EDGE_START = ANDROID_EDGE << 16, ANDROID_FLASH_START = ANDROID_FLASH << 16, ANDROID_FLASH_INFO_START = ANDROID_FLASH_INFO << 16, ANDROID_HOT_PIXEL_START = ANDROID_HOT_PIXEL << 16, ANDROID_JPEG_START = ANDROID_JPEG << 16, ANDROID_LENS_START = ANDROID_LENS << 16, ANDROID_LENS_INFO_START = ANDROID_LENS_INFO << 16, ANDROID_NOISE_REDUCTION_START = ANDROID_NOISE_REDUCTION << 16, ANDROID_QUIRKS_START = ANDROID_QUIRKS << 16, ANDROID_REQUEST_START = ANDROID_REQUEST << 16, ANDROID_SCALER_START = ANDROID_SCALER << 16, ANDROID_SENSOR_START = ANDROID_SENSOR << 16, ANDROID_SENSOR_INFO_START = ANDROID_SENSOR_INFO << 16, ANDROID_SHADING_START = ANDROID_SHADING << 16, ANDROID_STATISTICS_START = ANDROID_STATISTICS << 16, ANDROID_STATISTICS_INFO_START = ANDROID_STATISTICS_INFO << 16, ANDROID_TONEMAP_START = ANDROID_TONEMAP << 16, ANDROID_LED_START = ANDROID_LED << 16, ANDROID_INFO_START = ANDROID_INFO << 16, ANDROID_BLACK_LEVEL_START = ANDROID_BLACK_LEVEL << 16, ANDROID_SYNC_START = ANDROID_SYNC << 16, ANDROID_REPROCESS_START = ANDROID_REPROCESS << 16, ANDROID_DEPTH_START = ANDROID_DEPTH << 16, ANDROID_LOGICAL_MULTI_CAMERA_START = ANDROID_LOGICAL_MULTI_CAMERA << 16, ANDROID_DISTORTION_CORRECTION_START = ANDROID_DISTORTION_CORRECTION << 16, VENDOR_SECTION_START = VENDOR_SECTION << 16 camera_metadata_section_start_t;
而每个MODE的END值是根据START后的填充枚举变量偏移所得:
/** * Main enum for defining camera metadata tags. New entries must always go * before the section _END tag to preserve existing enumeration values. In * addition, the name and type of the tag needs to be added to * system/media/camera/src/camera_metadata_tag_info.c */ typedef enum camera_metadata_tag ANDROID_COLOR_CORRECTION_MODE = // enum | public | HIDL v3.2 ANDROID_COLOR_CORRECTION_START, ANDROID_COLOR_CORRECTION_TRANSFORM, // rational[] | public | HIDL v3.2 ANDROID_COLOR_CORRECTION_GAINS, // float[] | public | HIDL v3.2 ANDROID_COLOR_CORRECTION_ABERRATION_MODE, // enum | public | HIDL v3.2 ANDROID_COLOR_CORRECTION_AVAILABLE_ABERRATION_MODES, // byte[] | public | HIDL v3.2 ANDROID_COLOR_CORRECTION_END, ANDROID_CONTROL_AE_ANTIBANDING_MODE = // enum | public | HIDL v3.2 ANDROID_CONTROL_START, ANDROID_CONTROL_AE_EXPOSURE_COMPENSATION, // int32 | public | HIDL v3.2 ANDROID_CONTROL_AE_LOCK, // enum | public | HIDL v3.2 ANDROID_CONTROL_AE_MODE, // enum | public | HIDL v3.2 ANDROID_CONTROL_AE_REGIONS, // int32[] | public | HIDL v3.2 ANDROID_CONTROL_AE_TARGET_FPS_RANGE, // int32[] | public | HIDL v3.2 ANDROID_CONTROL_AE_PRECAPTURE_TRIGGER, // enum | public | HIDL v3.2 ANDROID_CONTROL_AF_MODE, // enum | public | HIDL v3.2 ANDROID_CONTROL_AF_REGIONS, // int32[] | public | HIDL v3.2 ANDROID_CONTROL_AF_TRIGGER, // enum | public | HIDL v3.2 ANDROID_CONTROL_AWB_LOCK, // enum | public | HIDL v3.2 ANDROID_CONTROL_AWB_MODE, // enum | public | HIDL v3.2 ANDROID_CONTROL_AWB_REGIONS, // int32[] | public | HIDL v3.2 ANDROID_CONTROL_CAPTURE_INTENT, // enum | public | HIDL v3.2 ANDROID_CONTROL_EFFECT_MODE, // enum | public | HIDL v3.2 ANDROID_CONTROL_MODE, // enum | public | HIDL v3.2 ANDROID_CONTROL_SCENE_MODE, // enum | public | HIDL v3.2 ANDROID_CONTROL_VIDEO_STABILIZATION_MODE, // enum | public | HIDL v3.2 ANDROID_CONTROL_AE_AVAILABLE_ANTIBANDING_MODES, // byte[] | public | HIDL v3.2 ANDROID_CONTROL_AE_AVAILABLE_MODES, // byte[] | public | HIDL v3.2 ANDROID_CONTROL_AE_AVAILABLE_TARGET_FPS_RANGES, // int32[] | public | HIDL v3.2 ANDROID_CONTROL_AE_COMPENSATION_RANGE, // int32[] | public | HIDL v3.2 ANDROID_CONTROL_AE_COMPENSATION_STEP, // rational | public | HIDL v3.2 ANDROID_CONTROL_AF_AVAILABLE_MODES, // byte[] | public | HIDL v3.2 ANDROID_CONTROL_AVAILABLE_EFFECTS, // byte[] | public | HIDL v3.2 ANDROID_CONTROL_AVAILABLE_SCENE_MODES, // byte[] | public | HIDL v3.2 ANDROID_CONTROL_AVAILABLE_VIDEO_STABILIZATION_MODES, // byte[] | public | HIDL v3.2 ANDROID_CONTROL_AWB_AVAILABLE_MODES, // byte[] | public | HIDL v3.2 ANDROID_CONTROL_MAX_REGIONS, // int32[] | ndk_public | HIDL v3.2 ANDROID_CONTROL_SCENE_MODE_OVERRIDES, // byte[] | system | HIDL v3.2 ANDROID_CONTROL_AE_PRECAPTURE_ID, // int32 | system | HIDL v3.2 ANDROID_CONTROL_AE_STATE, // enum | public | HIDL v3.2 ANDROID_CONTROL_AF_STATE, // enum | public | HIDL v3.2 ANDROID_CONTROL_AF_TRIGGER_ID, // int32 | system | HIDL v3.2 ANDROID_CONTROL_AWB_STATE, // enum | public | HIDL v3.2 ANDROID_CONTROL_AVAILABLE_HIGH_SPEED_VIDEO_CONFIGURATIONS, // int32[] | hidden | HIDL v3.2 ANDROID_CONTROL_AE_LOCK_AVAILABLE, // enum | public | HIDL v3.2 ANDROID_CONTROL_AWB_LOCK_AVAILABLE, // enum | public | HIDL v3.2 ANDROID_CONTROL_AVAILABLE_MODES, // byte[] | public | HIDL v3.2 ANDROID_CONTROL_POST_RAW_SENSITIVITY_BOOST_RANGE, // int32[] | public | HIDL v3.2 ANDROID_CONTROL_POST_RAW_SENSITIVITY_BOOST, // int32 | public | HIDL v3.2 ANDROID_CONTROL_ENABLE_ZSL, // enum | public | HIDL v3.2 ANDROID_CONTROL_AF_SCENE_CHANGE, // enum | public | HIDL v3.3 ANDROID_CONTROL_END,
......
对应关系如图所示:
然后在 camera_metadata_tag_info.c 中进行了映射和绑定,前面Native层CameraMetadata_getTagFromKey调用的camera_metadata_section_bounds实现在这里:
/** * ! Do not edit this file directly ! * * Generated automatically from camera_metadata_tag_info.mako */ const char *camera_metadata_section_names[ANDROID_SECTION_COUNT] = [ANDROID_COLOR_CORRECTION] = "android.colorCorrection", [ANDROID_CONTROL] = "android.control", [ANDROID_DEMOSAIC] = "android.demosaic", [ANDROID_EDGE] = "android.edge", [ANDROID_FLASH] = "android.flash", [ANDROID_FLASH_INFO] = "android.flash.info", [ANDROID_HOT_PIXEL] = "android.hotPixel", [ANDROID_JPEG] = "android.jpeg", [ANDROID_LENS] = "android.lens", [ANDROID_LENS_INFO] = "android.lens.info", [ANDROID_NOISE_REDUCTION] = "android.noiseReduction", [ANDROID_QUIRKS] = "android.quirks", [ANDROID_REQUEST] = "android.request", [ANDROID_SCALER] = "android.scaler", [ANDROID_SENSOR] = "android.sensor", [ANDROID_SENSOR_INFO] = "android.sensor.info", [ANDROID_SHADING] = "android.shading", [ANDROID_STATISTICS] = "android.statistics", [ANDROID_STATISTICS_INFO] = "android.statistics.info", [ANDROID_TONEMAP] = "android.tonemap", [ANDROID_LED] = "android.led", [ANDROID_INFO] = "android.info", [ANDROID_BLACK_LEVEL] = "android.blackLevel", [ANDROID_SYNC] = "android.sync", [ANDROID_REPROCESS] = "android.reprocess", [ANDROID_DEPTH] = "android.depth", [ANDROID_LOGICAL_MULTI_CAMERA] = "android.logicalMultiCamera", [ANDROID_DISTORTION_CORRECTION] = "android.distortionCorrection", ; unsigned int camera_metadata_section_bounds[ANDROID_SECTION_COUNT][2] = [ANDROID_COLOR_CORRECTION] = ANDROID_COLOR_CORRECTION_START, ANDROID_COLOR_CORRECTION_END , [ANDROID_CONTROL] = ANDROID_CONTROL_START, ANDROID_CONTROL_END , [ANDROID_DEMOSAIC] = ANDROID_DEMOSAIC_START, ANDROID_DEMOSAIC_END , [ANDROID_EDGE] = ANDROID_EDGE_START, ANDROID_EDGE_END , [ANDROID_FLASH] = ANDROID_FLASH_START, ANDROID_FLASH_END , [ANDROID_FLASH_INFO] = ANDROID_FLASH_INFO_START, ANDROID_FLASH_INFO_END , [ANDROID_HOT_PIXEL] = ANDROID_HOT_PIXEL_START, ANDROID_HOT_PIXEL_END , [ANDROID_JPEG] = ANDROID_JPEG_START, ANDROID_JPEG_END , [ANDROID_LENS] = ANDROID_LENS_START, ANDROID_LENS_END , [ANDROID_LENS_INFO] = ANDROID_LENS_INFO_START, ANDROID_LENS_INFO_END , [ANDROID_NOISE_REDUCTION] = ANDROID_NOISE_REDUCTION_START, ANDROID_NOISE_REDUCTION_END , [ANDROID_QUIRKS] = ANDROID_QUIRKS_START, ANDROID_QUIRKS_END , [ANDROID_REQUEST] = ANDROID_REQUEST_START, ANDROID_REQUEST_END , [ANDROID_SCALER] = ANDROID_SCALER_START, ANDROID_SCALER_END , [ANDROID_SENSOR] = ANDROID_SENSOR_START, ANDROID_SENSOR_END , [ANDROID_SENSOR_INFO] = ANDROID_SENSOR_INFO_START, ANDROID_SENSOR_INFO_END , [ANDROID_SHADING] = ANDROID_SHADING_START, ANDROID_SHADING_END , [ANDROID_STATISTICS] = ANDROID_STATISTICS_START, ANDROID_STATISTICS_END , [ANDROID_STATISTICS_INFO] = ANDROID_STATISTICS_INFO_START, ANDROID_STATISTICS_INFO_END , [ANDROID_TONEMAP] = ANDROID_TONEMAP_START, ANDROID_TONEMAP_END , [ANDROID_LED] = ANDROID_LED_START, ANDROID_LED_END , [ANDROID_INFO] = ANDROID_INFO_START, ANDROID_INFO_END , [ANDROID_BLACK_LEVEL] = ANDROID_BLACK_LEVEL_START, ANDROID_BLACK_LEVEL_END , [ANDROID_SYNC] = ANDROID_SYNC_START, ANDROID_SYNC_END , [ANDROID_REPROCESS] = ANDROID_REPROCESS_START, ANDROID_REPROCESS_END , [ANDROID_DEPTH] = ANDROID_DEPTH_START, ANDROID_DEPTH_END , [ANDROID_LOGICAL_MULTI_CAMERA] = ANDROID_LOGICAL_MULTI_CAMERA_START, ANDROID_LOGICAL_MULTI_CAMERA_END , [ANDROID_DISTORTION_CORRECTION] = ANDROID_DISTORTION_CORRECTION_START, ANDROID_DISTORTION_CORRECTION_END , ;
由 tag_info 结构体统一管理:
static tag_info_t android_color_correction[ANDROID_COLOR_CORRECTION_END - ANDROID_COLOR_CORRECTION_START] = [ ANDROID_COLOR_CORRECTION_MODE - ANDROID_COLOR_CORRECTION_START ] = "mode", TYPE_BYTE , [ ANDROID_COLOR_CORRECTION_TRANSFORM - ANDROID_COLOR_CORRECTION_START ] = "transform", TYPE_RATIONAL , [ ANDROID_COLOR_CORRECTION_GAINS - ANDROID_COLOR_CORRECTION_START ] = "gains", TYPE_FLOAT , [ ANDROID_COLOR_CORRECTION_ABERRATION_MODE - ANDROID_COLOR_CORRECTION_START ] = "aberrationMode", TYPE_BYTE , [ ANDROID_COLOR_CORRECTION_AVAILABLE_ABERRATION_MODES - ANDROID_COLOR_CORRECTION_START ] = "availableAberrationModes", TYPE_BYTE , ; ------------------------------------------------------------- tag_info_t *tag_info[ANDROID_SECTION_COUNT] = android_color_correction, android_control, android_demosaic, android_edge, android_flash, android_flash_info, android_hot_pixel, android_jpeg, android_lens, android_lens_info, android_noise_reduction, android_quirks, android_request, android_scaler, android_sensor, android_sensor_info, android_shading, android_statistics, android_statistics_info, android_tonemap, android_led, android_info, android_black_level, android_sync, android_reprocess, android_depth, android_logical_multi_camera, android_distortion_correction, ;
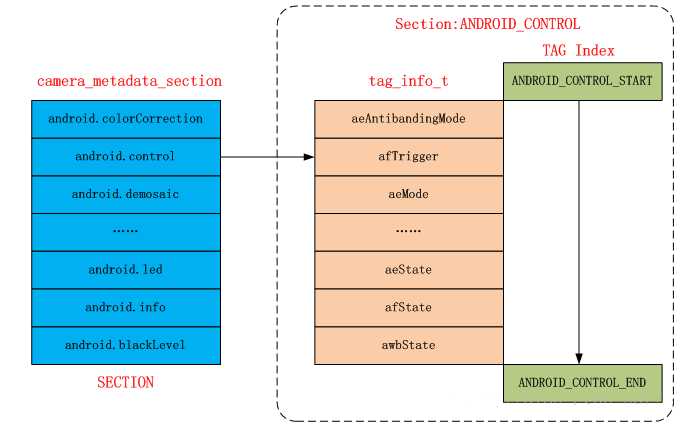
下图是Camera Metadata对不同section以及相应section下不同tag的布局图,以最常见的android.control Section为例进行描述:
如果要写数据,那么在native同样需要一个CameraMetadata对象,这里是在Java构造CameraMetadataNative时实现的,调用的native接口是nativeAllocate():
// instance methods "nativeAllocate", "()J", (void*)CameraMetadata_allocate ,
static jlong CameraMetadata_allocate(JNIEnv *env, jobject thiz) ALOGV("%s", __FUNCTION__); return reinterpret_cast<jlong>(new CameraMetadata());
CameraMetadata::CameraMetadata(size_t entryCapacity, size_t dataCapacity) : mLocked(false) mBuffer = allocate_camera_metadata(entryCapacity, dataCapacity);
函数allocate_camera_metadata()是重新根据入口数和数据大小计算、申请buffer。紧接着第二个place_camera_metadata()就是对刚申请的buffer,初始化一些变量,为后面更新,插入tag数据做准备。
camera_metadata_t *allocate_camera_metadata(size_t entry_capacity, size_t data_capacity) //传入的参数是(2,0) if (entry_capacity == 0) return NULL; size_t memory_needed = calculate_camera_metadata_size(entry_capacity, //返回的是header+2*sizeof(entry)大小 data_capacity);
void *buffer = malloc(memory_needed); //malloc申请一块连续的内存, return place_camera_metadata(buffer, memory_needed, //并初始化。 entry_capacity, data_capacity); camera_metadata_t *place_camera_metadata(void *dst, size_t dst_size, size_t entry_capacity, size_t data_capacity) if (dst == NULL) return NULL; if (entry_capacity == 0) return NULL; size_t memory_needed = calculate_camera_metadata_size(entry_capacity, //再一次计算需要的内存大小,为何?? data_capacity); if (memory_needed > dst_size) return NULL; camera_metadata_t *metadata = (camera_metadata_t*)dst; metadata->version = CURRENT_METADATA_VERSION; //版本号, metadata->flags = 0;//没有排序标志 metadata->entry_count = 0; //初始化entry_count =0 metadata->entry_capacity = entry_capacity; //最大的入口数量,针对ANDROID_FLASH_MODE这里是2个。 metadata->entries_start = ALIGN_TO(sizeof(camera_metadata_t), ENTRY_ALIGNMENT); //entry数据域的开始处紧挨着camera_metadata_t 头部。 metadata->data_count = 0; //初始化为0 metadata->data_capacity = data_capacity; //因为没有申请内存,这里也是0 metadata->size = memory_needed; //总的内存大小 size_t data_unaligned = (uint8_t*)(get_entries(metadata) + metadata->entry_capacity) - (uint8_t*)metadata; metadata->data_start = ALIGN_TO(data_unaligned, DATA_ALIGNMENT); //计算data数据区域的偏移地址。数据区域紧挨着entry区域末尾。 return metadata;
//根据入口数量和数据数量,计算实际camera_metadata需要的内存块大小(header+sizeof(camera_entry)+sizeof(data)。 size_t calculate_camera_metadata_size(size_t entry_count, size_t data_count) //针对我们上面讲的例子,传入的参数是(2,0) size_t memory_needed = sizeof(camera_metadata_t); //这里计算header大小了。 // Start entry list at aligned boundary memory_needed = ALIGN_TO(memory_needed, ENTRY_ALIGNMENT); //按字节对齐后的大小 memory_needed += sizeof(camera_metadata_buffer_entry_t[entry_count]); //紧接着是entry数据区的大小了,这里申请了2个entry内存空间。 // Start buffer list at aligned boundary memory_needed = ALIGN_TO(memory_needed, DATA_ALIGNMENT); //同样对齐 memory_needed += sizeof(uint8_t[data_count]); //data_count = 0 return memory_needed; //返回的最后算出的大小
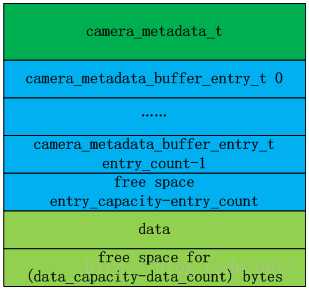
CameraMetadata数据内存块中组成的最小基本单元是struct camera_metadata_buffer_entry,总的entry数目等信息需要struct camera_metadata_t来维护。
结构图如下:
在HAL层代码中通过如下方式获取/更新 entry:
UINT32 SensorTimestampTag = 0x000E0010; camera_metadata_entry_t entry = 0 ; camera_metadata_t* pMetadata = const_cast<camera_metadata_t*>(static_cast<const camera_metadata_t*>(pResult->pResultMetadata)); UINT64 timestamp = m_shutterTimestamp[applicationFrameNum % MaxOutstandingRequests]; INT32 status = find_camera_metadata_entry(pMetadata, SensorTimestampTag, &entry); if (-ENOENT == status) //没有查找到tag时,则认为是一个新的tag,需要添加到大数据结构中 status = add_camera_metadata_entry(pMetadata, SensorTimestampTag, ×tamp, 1); else if (0 == status) status = update_camera_metadata_entry(pMetadata, entry.index, ×tamp, 1, NULL);
find_camera_metadata_entry函数非常好理解,获取对应tag的entry结构体,并将数据保存在entry传入的参数中。
注:struct camera_metadata_buffer_entry_t; //内部使用记录tag数据
struct camera_metadata_entry_t; //外部引用
int find_camera_metadata_entry(camera_metadata_t *src, uint32_t tag, camera_metadata_entry_t *entry) if (src == NULL) return ERROR; uint32_t index; if (src->flags & FLAG_SORTED) //之前初始化时,flags = 0,这里不成立,跳到else处 // Sorted entries, do a binary search camera_metadata_buffer_entry_t *search_entry = NULL; camera_metadata_buffer_entry_t key; key.tag = tag; search_entry = bsearch(&key, get_entries(src), src->entry_count, sizeof(camera_metadata_buffer_entry_t), compare_entry_tags); if (search_entry == NULL) return NOT_FOUND; index = search_entry - get_entries(src); else // Not sorted, linear search camera_metadata_buffer_entry_t *search_entry = get_entries(src); for (index = 0; index < src->entry_count; index++, search_entry++) //这里由于entry_count =0 因为根本就没有添加任何东西。 if (search_entry->tag == tag) break; if (index == src->entry_count) return NOT_FOUND; //返回NOT_FOUNT return get_camera_metadata_entry(src, index, //找到index的tag entry entry); int add_camera_metadata_entry(camera_metadata_t *dst, uint32_t tag, const void *data, size_t data_count) //这里传入的参数为(mBuffer,ANDROID_FLASH_MODE,5,1) int type = get_camera_metadata_tag_type(tag); if (type == -1) ALOGE("%s: Unknown tag %04x.", __FUNCTION__, tag); return ERROR; return add_camera_metadata_entry_raw(dst, //这里传入的参数为(mBuffer,ANDROID_FLASH_MODE,BYTE_TYPE,5,1) DOWN tag, type, data, data_count);
//下面是真正干实事的方法,这里会将外部传入的tag信息,存放到各自的家中 static int add_camera_metadata_entry_raw(camera_metadata_t *dst, uint32_t tag, uint8_t type, const void *data, size_t data_count) if (dst == NULL) return ERROR; if (dst->entry_count == dst->entry_capacity) return ERROR; //如果成立,就没有空间了。 if (data == NULL) return ERROR; size_t data_bytes = calculate_camera_metadata_entry_data_size(type, data_count); //计算要使用的内存大小这里1*1,但是返回的是0 if (data_bytes + dst->data_count > dst->data_capacity) return ERROR; //用的空间+当前数据位置指针,不能大于数据最大空间。 size_t data_payload_bytes = data_count * camera_metadata_type_size[type]; //data_count =1,data_payload_bytes =1; camera_metadata_buffer_entry_t *entry = get_entries(dst) + dst->entry_count;//得到当前空闲的entry对象。 memset(entry, 0, sizeof(camera_metadata_buffer_entry_t)); //清0 entry->tag = tag; //ANDROID_FLASH_MODE. entry->type = type; //BYTE_TYPE entry->count = data_count; //没有占用data数据域,这里就是0了。 if (data_bytes == 0) memcpy(entry->data.value, data, data_payload_bytes); //小于4字节的,直接放到entry数据域。 else entry->data.offset = dst->data_count; memcpy(get_data(dst) + entry->data.offset, data, data_payload_bytes); dst->data_count += data_bytes; dst->entry_count++; //入口位置记录指针+1. dst->flags &= ~FLAG_SORTED; return OK; //到这里ANDROID_FLASH_MODE就添加进去了。
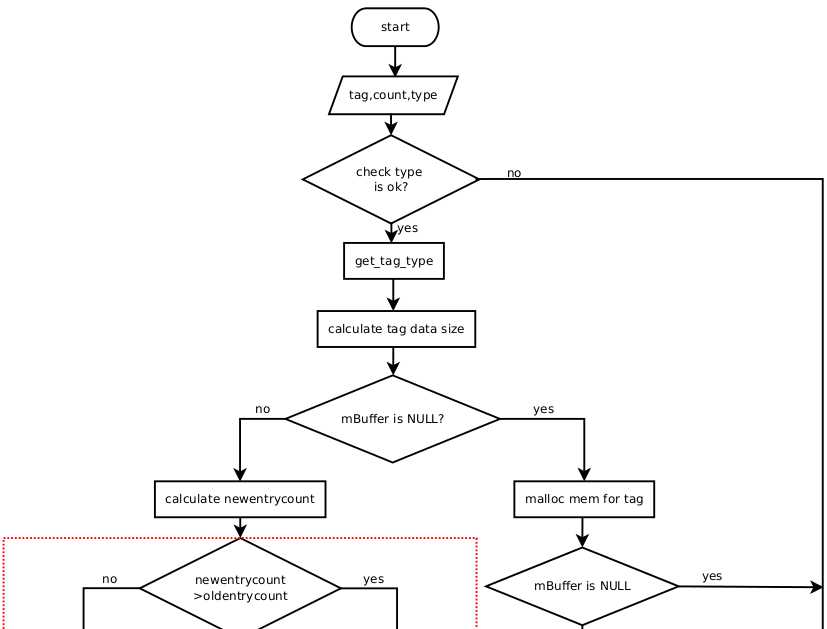
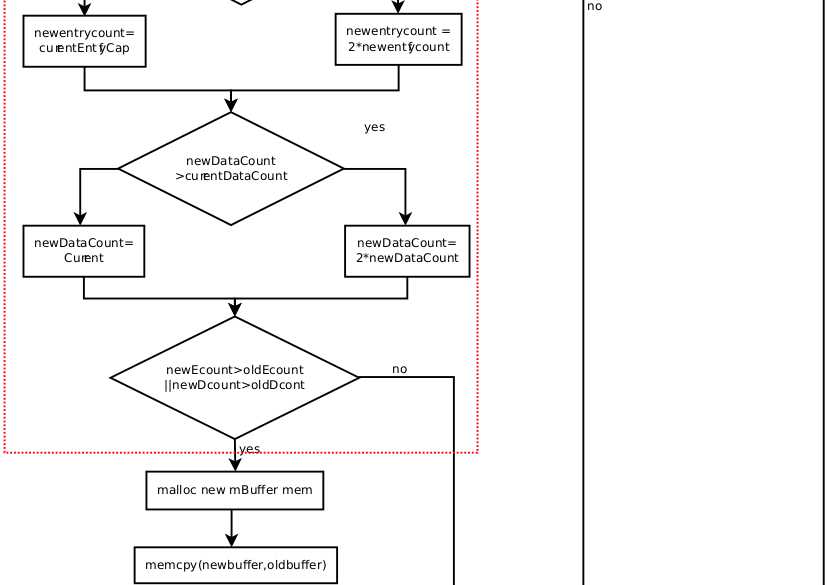
update更新并建立参数过程:CameraMetadata支持不同类型的数据更新或者保存到camera_metadata_t中tag所在的entry当中去,以一个更新单字节的数据为例,data_count指定了数据的个数,而tag指定了要更新的entry。
status_t CameraMetadata::update(uint32_t tag, const int32_t *data, size_t data_count) status_t res; if (mLocked) ALOGE("%s: CameraMetadata is locked", __FUNCTION__); return INVALID_OPERATION; if ( (res = checkType(tag, TYPE_INT32)) != OK) return res; return updateImpl(tag, (const void*)data, data_count);
首先是通过checkType,主要是通过tag找到get_camera_metadata_tag_type其所应当支持的tag_type(因为具体的TAG是已经通过camera_metadata_tag_info.c源文件中的tag_info这个表指定了其应该具备的tag_type),比较两者是否一致,一致后才允许后续的操作。如这里需要TYPE_BYTE一致:
const char *get_camera_metadata_tag_name(uint32_t tag) uint32_t tag_section = tag >> 16; if (tag_section >= VENDOR_SECTION && vendor_tag_ops != NULL) return vendor_tag_ops->get_tag_name( vendor_tag_ops, tag); if (tag_section >= ANDROID_SECTION_COUNT || tag >= camera_metadata_section_bounds[tag_section][1] ) return NULL; uint32_t tag_index = tag & 0xFFFF;//取tag在section中的index,低16位 return tag_info[tag_section][tag_index].tag_name;//定位section然后再说tag int get_camera_metadata_tag_type(uint32_t tag) uint32_t tag_section = tag >> 16; if (tag_section >= VENDOR_SECTION && vendor_tag_ops != NULL) return vendor_tag_ops->get_tag_type( vendor_tag_ops, tag); if (tag_section >= ANDROID_SECTION_COUNT || tag >= camera_metadata_section_bounds[tag_section][1] ) return -1; uint32_t tag_index = tag & 0xFFFF; return tag_info[tag_section][tag_index].tag_type;
分别是通过tag取货section id即tag>>16,就定位到所属的section tag_info_t[],再通过在在该section中定位tag index一般是tag&0xFFFF的低16位为在该tag在section中的偏移值,进而找到tag自身的struct tag_info_t.
updataImpl函数主要是讲所有要写入的数据进行update操作:
status_t CameraMetadata::updateImpl(uint32_t tag, const void *data, size_t data_count) status_t res; if (mLocked) ALOGE("%s: CameraMetadata is locked", __FUNCTION__); return INVALID_OPERATION; int type = get_camera_metadata_tag_type(tag); if (type == -1) ALOGE("%s: Tag %d not found", __FUNCTION__, tag); return BAD_VALUE; size_t data_size = calculate_camera_metadata_entry_data_size(type, data_count); res = resizeIfNeeded(1, data_size);//新建camera_metadata_t if (res == OK) camera_metadata_entry_t entry; res = find_camera_metadata_entry(mBuffer, tag, &entry); if (res == NAME_NOT_FOUND) res = add_camera_metadata_entry(mBuffer, tag, data, data_count);//将当前新的tag以及数据加入到camera_metadata_t else if (res == OK) res = update_camera_metadata_entry(mBuffer, entry.index, data, data_count, NULL); if (res != OK) ALOGE("%s: Unable to update metadata entry %s.%s (%x): %s (%d)", __FUNCTION__, get_camera_metadata_section_name(tag), get_camera_metadata_tag_name(tag), tag, strerror(-res), res); IF_ALOGV() ALOGE_IF(validate_camera_metadata_structure(mBuffer, /*size*/NULL) != OK, "%s: Failed to validate metadata structure after update %p", __FUNCTION__, mBuffer); return res;
流程框图如下:
最终可以明确的是CameraMetadata相关的参数是被Java层来set/get,但本质是在native层进行了实现,后续如果相关控制参数是被打包到CaptureRequest中时传入到native时即操作的还是native中的CameraMetadata。
三、设置AF的工作模式示例
下面以API2中java层中设置AF的工作模式为例,来说明这个参数设置的过程:
//Java部分代码
mPreviewBuilder.set(CaptureRequest.CONTROL_AF_MODE, CaptureRequest.CONTROL_AF_MODE_CONTINUOUS_PICTURE); session.setRepeatingRequest(mPreviewBuilder.build(), mSessionCaptureCallback, mHandler);
其中CONTROL_AF_MODE定义在CaptureRequest.java中如下以一个Key的形式存在:
/* @see #CONTROL_AF_MODE_OFF
* @see #CONTROL_AF_MODE_AUTO
* @see #CONTROL_AF_MODE_MACRO
* @see #CONTROL_AF_MODE_CONTINUOUS_VIDEO
* @see #CONTROL_AF_MODE_CONTINUOUS_PICTURE
* @see #CONTROL_AF_MODE_EDOF
*/
public static final Key<Integer> CONTROL_AF_MODE = new Key<Integer>("android.control.afMode", int.class);
public Key(String name, Class<T> type) mKey = new CameraMetadataNative.Key<T>(name, type);
在CameraMetadataNative.java中Key的构造:
public Key(String name, Class<T> type) if (name == null) throw new NullPointerException("Key needs a valid name"); else if (type == null) throw new NullPointerException("Type needs to be non-null"); mName = name; mType = type; mTypeReference = TypeReference.createSpecializedTypeReference(type); mHash = mName.hashCode() ^ mTypeReference.hashCode();
其中CONTROL_AF_MODE_CONTINUOUS_PICTURE定义在CameraMetadata.java中
public static final int CONTROL_AF_MODE_CONTINUOUS_PICTURE = 4;
逐一定位set的入口:
a. mPreviewBuilder是CaptureRequest.java的build类,其会构建一个CaptureRequest:
public Builder(CameraMetadataNative template) mRequest = new CaptureRequest(template);
private CaptureRequest() mSettings = new CameraMetadataNative(); mSurfaceSet = new HashSet<Surface>();
mSetting建立的是一个CameraMetadataNative对象,主要用于和Native层进行接口交互,构造如下:
public CameraMetadataNative() super(); mMetadataPtr = nativeAllocate(); if (mMetadataPtr == 0) throw new OutOfMemoryError("Failed to allocate native CameraMetadata");
b. CaptureRequest.Build.set()
public <T> void set(Key<T> key, T value) mRequest.mSettings.set(key, value);
public <T> void set(CaptureRequest.Key<T> key, T value) set(key.getNativeKey(), value);
考虑到CaptureRequest extend CameraMetadata,则CaptureRequest.java中getNativeKey:
public CameraMetadataNative.Key<T> getNativeKey() return mKey;
mKey即为之前构造的CameraMetadataNative.Key:
public <T> void set(Key<T> key, T value) SetCommand s = sSetCommandMap.get(key); if (s != null) s.setValue(this, value); return; setBase(key, value);
private <T> void setBase(Key<T> key, T value) int tag = key.getTag(); if (value == null) // Erase the entry writeValues(tag, /*src*/null); return; // else update the entry to a new value Marshaler<T> marshaler = getMarshalerForKey(key); int size = marshaler.calculateMarshalSize(value); // TODO: Optimization. Cache the byte[] and reuse if the size is big enough. byte[] values = new byte[size]; ByteBuffer buffer = ByteBuffer.wrap(values).order(ByteOrder.nativeOrder()); marshaler.marshal(value, buffer); writeValues(tag, values);
首先来看key.getTag()函数的实现,他是将这个key交由Native层后转为一个真正的在Java层中的tag值:
public final int getTag() if (!mHasTag) mTag = CameraMetadataNative.getTag(mName); mHasTag = true; return mTag;
public static int getTag(String key) return nativeGetTagFromKey(key);
是将Java层的String交由Native来转为一个Java层的tag值。
再来看writeValues的实现,同样调用的是一个native接口,很好的阐明了CameraMetadataNative的意思:
public void writeValues(int tag, byte[] src) nativeWriteValues(tag, src);
同样和开头native层代码部分对应起来了。
-end-
以上是关于Android : Camera HAL3的参数传递(CameraMetadata)的主要内容,如果未能解决你的问题,请参考以下文章
Android Camera HAL3 -SessionParameter
Android Camera HAL3 -SessionParameter
Android Camera HAL3 - Multi Camera