61 相机投影原理
Posted ghjnwk
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了61 相机投影原理相关的知识,希望对你有一定的参考价值。
0 引言
世界坐标系下的点如何投影到CCD镜头上,通过成像的方式得到点在二维图像上的像素坐标值,这是摄影测量中的一个基础而核心的问题。这个问题中核心的东西有两个:1、坐标系的定义及其空间转换矩阵 2、成像中的误差 下面将从这两个角度对这个问题进行详细探讨。文章参考了 陈建平: 《相机成像原理》PPT, 《学习opencv》以及《计算机视觉中的多视图几何》,如有错误欢迎探讨。
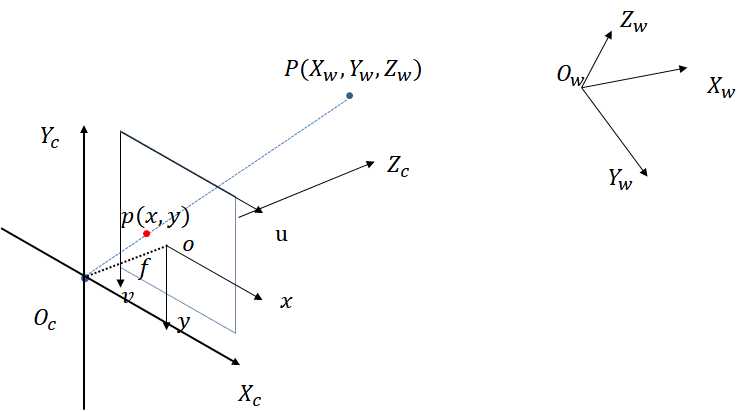
1 相机投影中的坐标系
在《相机成像原理》中,陈建平指出图像处理涉及到四个坐标系,如下图所示。
2 相机投影中的坐标转换关系
3 成像中的误差
4 结论
以上是关于61 相机投影原理的主要内容,如果未能解决你的问题,请参考以下文章